 智能駕駛系統產業化的思考與實踐
智能駕駛系統產業化的思考與實踐
2018年6月21-22日,由布谷鳥科技、佐智汽車主辦,艾拉比智能、ADI亞德諾半導體、索喜科技贊助支持的“2018第二屆智能座艙與智能駕駛峰會”在深圳福田區綠景錦江酒店舉辦。北京經緯恒潤科技有限公司智能駕駛事業部總經理薛俊亮在會上做了《智能駕駛產業化的思考和實踐》的主題演講。
恒潤科技 薛俊亮
薛俊亮:我今天演講的題目是智能駕駛系統產業化的思考與實踐,我們思考了很長時間,思考怎么把智能駕駛變成實際的產品。
首先介紹一下我們公司。恒潤科技經過近20年的發展,在汽車電子配套和咨詢服務兩個方面均積累豐富的經驗,致力于為乘用車、商用車、共享出行、專用車輛等提供智能駕駛整體解決方案,涵蓋環境感知、信息融合、智能決策、控制執行、系統集成和仿真測試等關鍵技術。目前公司員工近2000人,65%以上為碩士或博士學歷。
引子
之前我們公司做過一系列ADAS功能的研發和測試,這是其中非常苛刻的一項AEB實驗:一個小孩從兩輛灰黑色的車后面沖出來,駕駛員的視野被遮擋,車輛自動識別目標并緊急制動。恒潤科技2014年在英國Thatcham試驗場已經取得這個測試項目的ENCAP五星成績。
我們不僅關注標準實驗,我們更關心車輛實際行駛的工況,一家國內大型OEM的產品車型裝配了恒潤科技的ADAS系統,某一位消費者購買了這款車,某天遇到很極端、很恐怖的工況:前車橫穿馬路,突然間有一個電動車從視野盲區沖出來,當時天氣陰暗,地面潮濕。這種環境下,ADAS系統及時識別出電動車,車輛做了自動緊急剎車的動作。駕駛員驚出一身冷汗,同時也對這臺安裝了ADAS的車更加認可。有了ADAS輔助駕駛系統,就已經可以幫助我們解決很多問題,挽救很多生命。
從L0到L4
前面是一個引子,關于自動駕駛,我們關心的是如何減少交通事故、如何減少擁堵時間,如何讓大家在擁堵的時候可以娛樂或者工作,享受擁堵的過程。我們公司在原有的汽車電子事業部的基礎上衍生出來兩個新的事業部,智能駕駛和車聯網,可以提供汽車電子相關的咨詢服務和量產產品,也可以提供數據采集、大數據分析和車隊管理等業務。
我們公司在2008年、2009年做ADAS預研,2012年我們基于Mobileye和一家大型OEM合作做出原型車,2016年我們支持的第一款車上市,上汽榮威RX5,2017年上汽大通D90上市。我們花了4年以上的時間從ADAS原型到產品落地,中間過程異常之復雜。
2015年公司成立智能駕駛方向,目標做L3及以上的預研和產品。我們做了很多的樣車,也研究了很多的技術,包含攝像頭、毫米波、超聲波、激光雷達及信息融合、決策控制等多方面的基礎技術,以及高速公路、停車場、園區、港口等各類場景樣車的演示。
以上我們只是做出一些自動駕駛的Demo。我是贊成哈曼專家的意見的,我一開始也認為L3是反人性的,L3說我開車可以睡覺卻不能好好睡覺,隨時準備被喚醒。但是我們研究半天發現L3跳不過去,因為L4太難,需要的時間太長,L3是一個緩沖階段,我們做L2花了4年,我們做L3、L4要花多少年?不可能等到10年20年后才推出L4,我們需要3-5年做出一個中間的穩定版本,讓工程師可以積累一些數據和經驗,消費者也可以盡早享受到一些新功能。我的觀點是L2也是可以救命的,L3應該可以救更多的命。
作為汽車電子供應商,我們不能只說做L3或L4,我們更關心的是具體實現哪些功能。L3很宏觀,包括了ACC、車道保持、AEB、手動輔助換道或者自動換道等,都是L3的一部分。我們需要把功能按照一定的規范分解,保證每一部分都可描述可實現可驗證,保證車輛拿到比較高的NCAP評分,保證消費者買到安全可靠的產品。作為汽車電子供應商會沿著這樣的路線往下走。
這是恒潤科技目前L2的產品,基于攝像頭實現ADAS的功能,包含了縱向控制、側向控制和各種報警功能,現在已經量產的客戶有一汽、上汽。我們正在進行開發的車型有40多款,后面還有幾十款在談,很快市面上會出現很多搭載我們產品的車型。
這是上汽大通的一款產品,D90,全尺寸SUV,搭載了我們的L2級ADAS產品。經我們略微改造,這輛車可以實現駕駛員放開手、放開腳在可控封閉道路跑幾十公里,人工接管次數為零,方向盤和車速車距控制都非常平穩。當然,最終量產的產品會在駕駛員放手10s內提醒接管。這是當年的王謝堂前燕,之前類似功能需要花費近百萬買某些國外品牌,現在飛入尋常百姓家,現在上汽這款車只需20萬左右。
這是L3嗎?這是自動駕駛么?真的不是,因為這款車功能定義為ADAS L2,并沒有針對自動駕駛做特有的設計。所以方向盤的脫手檢測是非常重要的,正如“狼來了”的故事,系統會經常善意提醒你狼來了,如果你一直不相信,某天狼真的來了,后果可能非常嚴重。
在從L2通往L3的路上很重要的一個功能就是長時間放開手,為了“長時間”這三個字,我們開發了駕駛員監測系統DMS,這也是凱迪拉克CT6很重要的功能,CT6可以實現超級巡航,高速公路特定工況可以長時間放開手,但是必須要求駕駛員始終關注開車這件事。如何保證呢?如果我們要求可以長時間放開手,意味著不做方向盤脫手檢測,那么必須做人臉檢測,必須時刻關注駕駛員狀態,不許長時間喝水、抽煙、打電話、閉眼、打哈欠,必須保證駕駛員時刻清醒地關注前方路況。
DMS產品目前我們已經有一些定點的項目正在進行,基于我們的DMS產品可以幫助客戶實現高速公路長時間放開手的功能,但這還是L2。
當然,DMS系統對L3也有用,L3是有點反人性的,L3系統允許駕駛員看書、看電影,但是最好不要睡覺,或者建議設置苛刻一點:不許睡覺。所以我們需要靠DMS監控駕駛員,可以看手機、打電話、喝水,但是需要時刻保持清醒以便于在接到請求后較短時間內安全平順接管駕駛任務,這是駕駛員監控系統在L3上的使用。
為了實現L2的高級功能或者接近L3的功能,還有一個產品很重要,那就是高精地圖和高精定位系統,因為現在普通L2級的車道保持功能可以依靠攝像頭在高速公路上實現車道居中功能并持續很長時間,但還是存在失效的可能,高速公路某段線偶爾污損,或者車輛突然進入團霧中,人都看不見,怎么處理?這時需要高精定位和地圖做輔助手段,沿著GPS軌跡繼續行駛一小段時間并等待駕駛員接管,這就是CT6配置高精地圖和定位的原因之一。為了保證安全,不能出萬分之一的事故,需要各種各樣的方式提供冗余備份。哪些方式呢?首先是GPS+北斗+千尋RTK組合定位,基于千尋的產品可以在開闊場景實現約5厘米級的定位。而GPS總是有信號不好的時候,我們需要做基于高精度地圖和攝像頭數據的特征匹配。將各種定位方法融合起來,在各種環境下,車道線清晰和不清晰時、隧道里面、山林里面、城市環島里面,保證定位精度。
有了這樣的定位系統,我們開始繼續思考如何從L3探索L4,L4一種落地的場景也許在這里,就是最后一公里的代客泊車。在泊車這一場景,也許我們可以實現自動駕駛,也許可以車上沒有人,當然,我說的只是“也許”,因為里面有很無奈的極端工況。例如,一個哥們兒半夜喝多了躺在地上穿著黑衣服、戴黑帽子,千萬不能壓到他的頭,當然也不能壓到他的手指;另外的例子,停車場里也許會有某人家的小孩在亂跑,也可能有價值10萬的寵物貓貓狗狗。表面很容易、很簡單的情況,要想做到完全無人也是非常困難的。我們需要做好充分的準備。
所以我的建議,我們要融合超聲波和攝像頭,甚至未來更多的傳感器,從人在車上,手放開,腳控剎車的自動泊車開始;逐步做到人在車上,手腳放開;之后再嘗試人在車外,但必須人在車旁,長按鑰匙按鈕自動泊車;之后才能嘗試人在遠端,通過手機監控車周邊360度的畫面,遠程一鍵遙控泊車/叫車;最后才能實現我們想要的真正意義上的L4級無人代客泊車系統。
L2+計算平臺及系統架構
前面提到的是各種子功能,整個系統要落地,需要一個強大的計算平臺和完備的系統架構,以下介紹定位于L2+及L3的計算平臺。
它的特點是有兩片EyeQ4,加上兩片TC297,再加一片S32V,這是比較冗余的方案,設計目標是硬件層面達到功能安全ASIL D。它可以支持12路CANFD加4路以太網,還有多個攝像頭,可以實現環境感知、信息融合和決策控制。這個平臺目前正處于研發階段,后期會根據實際項目需求修改完善。
架構層面,我們同樣把系統分級為環境感知、決策規劃、控制執行三大部分。為了預研自動駕駛功能,我們在車周圍設計了一圈攝像頭、一圈毫米波雷達、一圈激光雷達等,這么多圈因為我們要足夠的冗余備份;除了傳感系統,決策控制系統也要考慮各種情況的失效處理;轉向和制動等重要的執行機構也需要考慮冗余備份方案;還需要考慮駕駛員監控系統、高精定位系統、V2X系統、HMI人機交互系統、健康管理和數據記錄系統等等。最終的產品是否做到這么復雜,這涉及成本和功能的問題,我們會和客戶綜合考慮,會一邊思考一邊實踐。當然,我們還有商用車的方案,也是很多的傳感器,時間關系不多講了。
DEMO演示
(播放視頻)這是2015年到現在逐步做的自動駕駛的DEMO,我們從各種各樣的DEMO出發,把它逐漸變成產品,做DEMO是思考的過程,把它中間一小部分變成產品是實踐的過程。
我們的DEMO車可以實現手機召喚功能,用手機給汽車打電話讓它過來接我。這臺車在城市工況可以穿過紅綠燈、十字路口和天橋,天橋下面沒有GPS信號,十字路口沒有車道線,大家可以設想這種工況的難度;DEMO車還需要自動通過收費站,可以看到系統非常穩定,這是我們在2016年10月份用戶大會上做的展示。
(播放視頻)最近大家喜歡講雨天的故事,我也給大家講一個雨天的故事。右邊的圖是在實驗道路上,速度是100km/h,放開手腳,我們的領導坐在這臺車上,領導說把雨刷關了。我們以攝像頭為主的方案,沒有激光雷達,把雨刷關了,大伙可以看圖上,人眼幾乎看不到車道線。在這種情況下,那個車以100km/h的速度跑了一分多鐘,非常穩定。
港口自動駕駛
這就是我們思考的過程,前面做了很多DEMO以后,衍生出部分產品,做出L2的產品以后,開始思考什么時候變到L3、什么時候變到自動駕駛?自動駕駛的切入點那么多,我先做哪個?
我們分析各個場景下的技術難度,各個場景下的潛在風險,人工成本和司機的勞動強度等多個維度。我們做自動駕駛目的是解放司機,如果司機勞動強度很大、人工成本很高,這種場景的優先級就會比較高。如果司機很輕松,人工成本很低或者司機很容易就可以雇到,這種場景的優先級可以稍微低一點。
如果場景相對簡單,潛在風險較小,這種情況實現起來會容易一點,反之則難度較大,我個人總結的通俗易懂的說法,如果車內有人、車外有人,這是比較復雜且風險較大的場景。因為車內有人要求舒適,不能隨隨便便就剎車或猛打方向,車外有人則要求安全,見到行人就需要提前考慮避讓動作。舒適和安全在實現層面會有一定的沖突,需要在二者之前做很好的權衡優化。
綜合考慮以上各個維度,我們找了港口這個切入點,恒潤科技和青島港、一汽解放一起發布的了這款樣車,在港口實現完全無人的集裝箱貨運服務,還保證了相對低的成本。我們用相對傳統的牽引車和叫做ICV的無駕駛艙集裝箱貨運底盤實現完全無人的自動化運行。這個視頻是今年4月份發布的,但是想變成產品還有很長的路要走。我們每天做各種各樣的實驗,要保證在即使GPS信號不好的時候,停車的精度要到5厘米,這是很困難的事情。
我們要做好港口的事情不光要做好自動駕駛車,港口是龐大的系統,也是很大的產業鏈,傳統汽車人進入港口很迷茫,港口的運營調度很復雜而且已經很成熟的,如何切進去,如何把自動駕駛系統和現有的系統做融合?所以我們做了一個后臺調度系統和港口原有的后臺對接,監控管理每個車的狀態,這個工作需要協調多方的資源,但同時也是必須做的,我們在努力推進。
仿真及道路實驗
剛才看到的都是經過精心整理的結果,看起來在一些比較苛刻的情況下系統也非常穩定,為什么呢?是因為我們提前做了很多仿真測試,只有在仿真的時候才敢做一些極端工況,這樣才能并暴露出足夠多的問題。而道路實驗一般不會出問題,因為有安全員,他把問題提前化解了,不會讓研發人員看到問題最后的結果,研發人員也就沒有足夠的數據去研究出問題以后的處理措施。仿真環境里面可以很放心的做一些極端工況,比如讓行人反復在車前跑來跑去,用大量的數據評估整個系統在各種情況下的穩定性和可靠性。
模擬的場景需要非常的逼真,例如各種行人和交通車輛的行為、各種光影效果、遮擋、夜間燈光對于不同材質的反射等等。模擬仿真需要修路,當年我自己開玩笑說我是修路的,我曾經在模擬環境手動修了很長的路。現在我們和高德合作,直接把高精地圖導入到模擬環境,例如我們把北京很多路瞬間自動在仿真環境中修建出來,不僅包含道路形狀,還要把地面指示箭頭、實線、虛線交通標志牌等都自動生成,再基于算法自動生成大量的交通車流,這樣就可以每天24小時在虛擬環境里,在北京乃至世界各地的道路上運行各種各樣的測試工況。
當然,在仿真做得比較穩定以后,還需要做一些道路實驗。研發、仿真都需要很多的數據和素材,所以我們必須把外界場景真實可靠的采集回來,說起來容易,做起來真的很難。其中最復雜的就是大量不同類型數據的同步采集和分析,包含了視頻、CAN總線、GPS、以太網和一些IO信號等等,我們采用了英國Zuragon公司的Vicando產品,可以很好的滿足這一要求。
以上是我們在智能駕駛系統產業化過程中的一些思考和實踐,與大家交流學習。做智能駕駛系統,需要仰望星空來思考,更需要腳踏實地來實踐。當然,只靠我們自己顯然不夠,我們需要和在座的各位乃至全社會相關行業專家一起,攜手努力共同把自動駕駛從理想變成現實。謝謝大家!
-
汽車電子
+關注
關注
3028文章
8003瀏覽量
167545 -
智能駕駛
+關注
關注
3文章
2572瀏覽量
48845 -
自動駕駛
+關注
關注
784文章
13915瀏覽量
166774
原文標題:恒潤科技薛俊亮:做智能駕駛系統,需要仰望星空來思考,更需要腳踏實地來實踐
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
紫光同芯亮相SAECCE 2024汽車芯片關鍵技術及產業化應用論壇
商湯科技大模型產業化路徑的實踐經驗
固態電池產業化加速,企業積極布局市場
開啟全新AI時代 智能嵌入式系統快速發展——“第六屆國產嵌入式操作系統技術與產業發展論壇”圓滿結束
北京銘鎵半導體引領氧化鎵材料創新,實現產業化新突破
2023年中國專利調查報告:發明專利產業化率顯著提升,創新環境持續優化
【換道賽車:新能源汽車的中國道路 | 閱讀體驗】 新能源到底新在何處?新能源在國內如何發展?
深圳測試無人駕駛“空中出租車”eVTOL產業化受關注
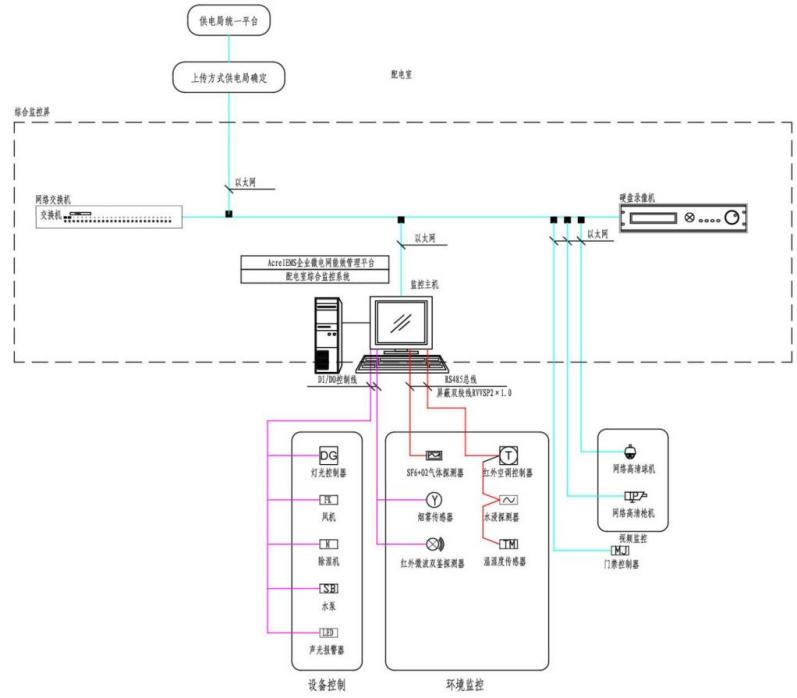
淺析配電室智能監控系統的設計與實踐探索
長飛光學與半導體石英元器件研發及產業化項目封頂







 工商網監
工商網監
評論