 微控制器中的固件實現無人機電機功能
微控制器中的固件實現無人機電機功能
到 2050 年,全球人口可能接近 100 億。聯合國糧食及農業組織 (UN FAO) 2017 糧食及農業未來報告指出,農業產量需增產 50% 才可提供充足的糧食。
聯合國糧食及農業組織指出了若干亟待解決的糧食增產挑戰。包括促進農村繁榮發展、完善糧食體系以及提高農業生產力。而先進技術對于應對這些挑戰起到重要作用。智能農業的出現有利于作物產量和家畜管理的改善。例如使用物聯網 (IoT) 技術可以提高作物產能和家畜健康水平。
收集作物高度、植物密度、葉片狀況或牲畜體溫等數據幫助農場主、農業生產者優化植物或動物管理,以及預測和最大化產量。經過數據分析后,農場主需要一些有效措施,從而能夠根據所收集信息快速做出決策。但主要問題是農場規模可能極其龐大,蔓延數千英畝。這時,作物或牲畜的檢查工作會十分耗時。此外,還難以全面了解作物或動物的健康狀況,不容易發現特定區域的局部種植密度不足、干旱或蟲害問題。
而無人機能夠勝任這些工作。技術公司正在尋找方法,讓農場主能夠使用無人機快速調查大面積區域,收集可見和非可見波長下的深度信息(圖 1)。無人飛行器 (UAV) 正推動著精準農業的形成,同時也為專家們帶了開發云分析工具的機遇,該工具旨在分析 UAV 飛行期間收集的數據,以供做出適當的響應。無人機通過優化灌溉、施肥或蟲害控制幫助農場主提高產量,并通過更高效利用化肥降低成本。
圖 1: 航拍影像的云分析可以檢測作物和土壤狀況。(圖片來源: PrecisionHawk)。
農用 UAV 并不局限于收集數據。具有 10 kg、20 kg 或更高有效載荷的多轉子 UAV 比使用拖拉機或輕型飛機的傳統農藥噴灑方式具有更多優勢。培訓 UAV 駕駛員比培訓飛行員的時間要短且費用低,而且就購買和操作飛行器本身而言費用也相對較低。與使用拖拉機相比,噴灑農藥的 UAV 速度更快且不會損害作物。此外,即使連日下雨造成地面積水的情況下,無人機仍可完成作業。
用于精準農業的 UAV 技術
UAV 進入精準農業市場的時間很短且正處于發展期,相關法規還未最終敲定。盡管美國聯邦航空管理局 (FAA) 批準個人使用 UAV,但目前禁止用于商用。
就 UAV 技術而言,一架合格的飛行器需要基本的電機和飛行控制、傳感器、遙測技術以及用于噴灑農藥的閥致動器和液位檢測等系統。還建議安裝基于雷達的防撞裝置。
輕型低功耗高光譜傳感器收集的數據相比于傳統可見光譜攝像機可為農場主提供更多作物狀況信息。高光譜傳感器起源于首先在衛星應用中得以驗證的高光譜技術。使用一系列檢測器在超出可見光譜的波長下采集數據,各檢測器經過調節后在超近紅外(VNIR,380 至 1000 nm)、近紅外(NIR,900 至 1700 nm)或短波長紅外(SWIR,950 至 2500 nm)等窄波段內工作。在這種波長下比單獨的可見光譜更能清晰地觀察到作物病害的化學特征或其他蟲害。現已面市的高光譜傳感器價格實惠,具有低失真、寬視場和板載處理功能,可以消除噪音并確保采集圖片的準確性。
實現飛行
用于精準農業的 UAV 種類多樣,從小型固定翼飛機到多轉子四軸無人機型平臺。用于噴灑農藥的 UAV 可能包含六個或更多轉子以提供充足升力,具體取決于預期的有效載荷。
無人機型 UAV 通常采用有刷或無刷直流 (BLDC) 電機驅動抬升旋翼。小型飛行器采用有刷電機以實現輕質簡易的特性,而要求高可靠性和低電磁噪聲的 UAV 更傾向于使用 BLDC,特別是大型 UAV。
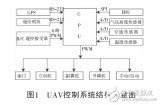
飛行器的核心部件是飛行控制器,用于處理導航、控制電機完成起飛以及在飛行中保持高度和航向。GPS 導航與輕型小型 MEMS 傳感器(例如 3 軸加速度計、3 軸陀螺儀和氣壓傳感器)相結合,可實現準確定位、運動控制和高度感知。就保證飛行穩定性而言,模型直升機控制器通過控制反扭矩尾槳來防止機身沿著自身軸線旋轉,與現今的多轉子 UAV 飛行控制器具有相似的原理。在 UAV 控制器中,基于 MEMS 傳感器融合的慣性測量功能可以調整每個電機的速度,確保飛行器按規定方向飛行。
作為精準農業輔助工具,飛行控制器的真正作用體現在用戶接口和特性方面,可以幫助確定 UAV 飛行路線。農場主需預先準確地確定 UAV 飛行路徑,以便獲取特定區域的完整圖片,或確保以最省時省力的方式全面藥物噴灑,且盡可能避免過噴情況。
加速電機控制開發
為簡化電機驅動的開發,眾多制造商提供了多種評估套件。控制算法通常免費提供,例如使用霍爾傳感器或反電動勢測量來檢測轉子位置的磁場定向控制 (FOC) 等。這些套件可通過提供示例軟件,幫助工程師們在應用開發方面取得有利的開端,讓其能夠快速順利地開發各類電機。
然而,即使可以借助這些套件,工程師們仍需掌握使用電機進行設計的專業知識,才能精準地控制速度與扭矩。挑戰在于為特定電機設置軟件,然后還需要微調參數以優化對速度和扭矩指令的響應。工程師需要算出電機的恒壓 (Ke)、摩擦系數和慣性矩。如果控制器依賴于反電動勢測量,需設置無傳感器狀態觀察和速度調節。最近,TI 和 STMicroelectronics 等供應商已成功簡化電機的特征化和調諧,因此開發人員無需事先了解電機特性便可驅動電機。兩家制造商的方案略有不同。
ST 在 MC 工作臺電機控制開發環境中創建識別和調諧功能(圖 2)。電機分析器通過靜態開環和閉環測試自動檢測電機參數,每次只需幾秒鐘即可完成。其他功率級、驅動和控制級參數通過 MC 工作臺 GUI 輸入。然后生成并編譯項目,讓電機開始轉動且受控。屆時 MC 工作臺一觸式調諧功能可以簡單直接地調整設置,保證速度和扭矩控制平穩。
圖 2: ST MC 工作臺輔助設置。電機分析器工具可以采集未知電機參數。
通過實施 MC 工作臺中的此功能,開發人員具有多種微控制器選擇,如種類繁多的 STM32 MCU,還可以利用 STM32 生態系統創建低成本的開發平臺。最近,ST 推出了采用不同方案的 STSPIN32F0。它將整個 STM32F0 微控制器和三相半橋柵極驅動器集成在同一封裝之中,具有過流/過壓/超溫保護以及一組用于霍爾傳感器解碼的運算放大器。STEVAL-SPIN3201 評估板將 STSPIN32F0 IC 與電源管理功能相結合,將與 STSW-STM32100 電機控制資源庫配合使用。下載 STSW-SPIN3201 固件示例并結合 MC 工作臺,快速實現電機驅動以及啟動開發工作。
TI 的方案基于將其 InstaSPIN?-MOTION 軟件解決方案嵌入到微控制器(如 TMS320F28069M 等 C2000 Piccolo? 系列器件)的 ROM 中。InstaSPIN-MOTION 包括 TI 的 FAST?(磁通量、角度、速度、扭矩)基于軟件的轉子磁通傳感器。還包括用于電機分析、單個參數調諧和干擾源抑制的元器件,可以確定電機類型(圖 3)。

圖 3: TI InstaSPIN-MOTION 采用嵌入在微控制器中的固件實現電機功能。
開發人員可以在 TI MotorWare? 軟件環境中使用 InstaSPIN-MOTION 功能。DRV8312-69M-KIT 將包含 TMS320F28069M 的控制板與包含 DRV8312 IC 的電源模塊基板相結合,DRV8312 IC 是一款包含驅動無刷直流電機所需電路的三相整合逆變器。還提供 55 W 電機。
總結
精準農業還為無人機技術帶來了另一激動人心的機會。采用高效經濟的方式優化產量勢在必行,這將促進行業蓬勃發展。使用軟件來簡化飛行編程并分析采集數據以及利用現有電機控制專業技術快速創建穩定可控機身,必將是成功的關鍵。
-
電機控制
+關注
關注
3535文章
1880瀏覽量
268880 -
電源模塊
+關注
關注
32文章
1707瀏覽量
92889 -
無人機
+關注
關注
230文章
10454瀏覽量
180684 -
drv8312
+關注
關注
0文章
3瀏覽量
7530
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論