 怎么利用前饋路徑縮短系統穩定時間?你只要知道以下幾點就行了
怎么利用前饋路徑縮短系統穩定時間?你只要知道以下幾點就行了
設想一個圖1所示的系統,它有一條從“A”到“B”的前向信號路徑,其中通過該路徑的信號延遲太長。
有時候,我們可以添加一條從“A”到“B”的輔助信號路徑來施加影響,提升信號速度,如圖2所示。前向饋送有助于加快信號的傳送速度。我們可以把這種方法叫做“前饋”。

如果我們做得正確,快速前饋路徑幾乎可以立即使“B”相當接近穩定,而慢速路徑要花費較長的時間才使“B”穩定。這樣我們可受益于更快的系統穩定時間。
考慮到這點,現在來看一個簡單的降壓開關穩壓器
假設效率為100%,輸出電壓等于輸入線電壓乘以使用脈寬調制(PWM)控制的開關元件的開/關占空比。因此,對于5V輸出和28V輸入來說,開關占空比將為17.857 %。我們得到28V × 0.17857 ... = 4.99996 ... = 5V。
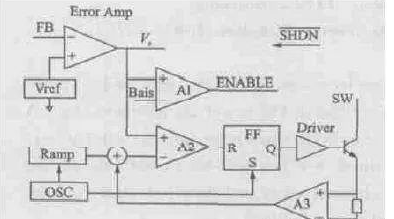
PWM功能是通過將誤差放大器的輸出電壓與斜坡電壓波形進行比較來實現的,如圖4所示,其中誤差放大器輸出必須根據需要上下調節,以得到PWM所需的脈沖寬度。輸入線電壓的變化引起誤差放大器輸出電壓的變化,這又導致PWM占空比的變化。
這很有效,但誤差放大器輸出可能需要很長時間才能從一種需要的電平轉換到另一種。我們有慢路徑,其輸入線電壓是“A”,PWM比較器輸出占空比是 “B”。幸運的是,我們可添加前饋路徑來顯著縮短穩壓器的穩定時間。
訣竅是使用一個可變的斜坡波形,而不是穩定不變的斜坡。如圖5所示,較高的輸入線電壓會升高斜坡,立即使PWM脈沖變窄,此時不得不等待通過誤差放大器的響應。與之相似,較低的輸入線電壓會降低斜坡,立即加寬PWM脈沖,而不必等待。現在我們可以采用快速方法。
立即使PWM脈沖變窄或加寬的結果也是誤差放大器最終會得到的,并且誤差放大器一定要這樣的結果來滿足所需的輸出電壓精度,但是使用前饋縮短了最終的穩定時間。如果做得好,當輸入線電壓變化時,我們只需讓誤差放大器輸出稍微變動一點,甚或可能根本不用變動,如圖5所示。
前饋實現在很大程度上是一種平衡行為,它力求在輸入線電壓變化時誤差放大器變動很小,以便輸入線電壓變化時反饋回路可以更快地建立起來。
德州儀器(TI)在其聲名卓著的1825型PWM控制器UC1825-SP中,采用了這種前饋概念。
在德州儀器的圖解中, RFF和CFF被選擇用來優化前饋均衡。
-
放大器
+關注
關注
143文章
13612瀏覽量
213706 -
穩壓器
+關注
關注
24文章
4245瀏覽量
93911
原文標題:利用前饋路徑縮短系統穩定時間
文章出處:【微信號:gh_bee81f890fc1,微信公眾號:面包板社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ADS1246校正是不是只需要發送校正命令就行了?
請大神幫忙解釋下這個電路能不能用分壓就行了。

便攜式設備應該怎么布局?請記住以下幾點就行了
后段裝備系統集成是什么?你只要記住以下幾點就行了
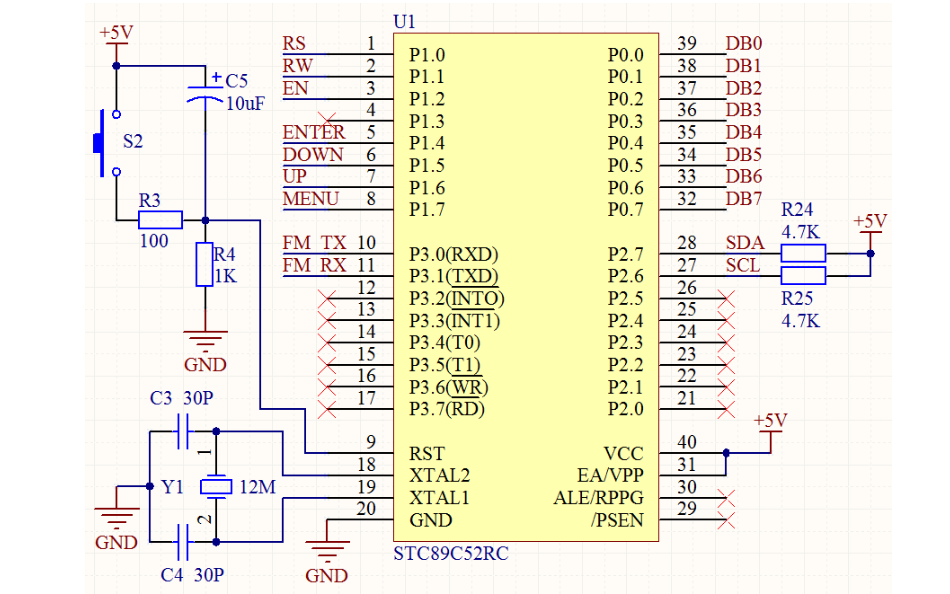
STC單片機定時器設置入門資料和STC89C52RC單片機定時器示例代碼





 工商網監
工商網監
評論