 如何讓機器人減少摔倒呢?新算法讓機器人在失去平衡的一瞬間采取糾正措施
如何讓機器人減少摔倒呢?新算法讓機器人在失去平衡的一瞬間采取糾正措施
對于機器人來說,重力可能不是好事。雙足機器人的行走是一大難題,而且經常摔倒。雖然機器人摔倒后自己站起來也很驚艷,但如何讓機器人減少摔倒呢?杜克大學研發新算法,讓機器人在失去平衡的一瞬間采取糾正措施——扶一下墻。研究人員稱,這是首個摔倒時會自己扶墻的機器人。
對于機器人來說,重力或許不是好事。
DARPA機器人挑戰賽有一個病毒傳播的視頻,其中各種各樣的人形機器人搖搖晃晃、笨拙地摔倒。
像這樣:
這樣:
還有這樣:
等等,DARPA機器人挑戰賽是不是一項看機器人摔倒的比賽?當然不是。
對于機器人來說,兩足行走是相當不穩定的。這是機器人研發的一大挑戰,不僅是因為機器人要努力完成挑戰任務,而且,摔倒會損壞這些非常昂貴的機器。
扶墻:利用周圍的環境防止摔倒
世界各地的機器人專家都在努力解決這個問題,提出各種各樣的方案。杜克大學Kris Hauser的研究組希望在機器人失去平衡后添加一系列糾正措施,就像人類在被絆倒后會撐一下,他們希望機器人能夠利用周圍的環境。
“如果一個人被推向墻壁或欄桿,他們能夠利用墻壁或欄桿的表面,用手撐一下以保持直立。我們希望機器人也能這樣做。”杜克大學電子與計算機工程系副教授KrisHauser說:“研究如何讓機器人動態地選擇手放置的位置,以防止摔倒,我想我們是研究這個領域的唯一一個團隊。”
人形機器人(實驗里的這個機器人名為ROBOTIS Darwin Mini)通過扶著墻壁穩定自己,以減少摔落的傷害。
利用周圍的平面防止摔倒:
這樣:
還有這樣:
雖然這樣的決定和行動對于我們人類來說是第二天性,但把它們編程成機器人的反應卻很難。為了簡化過程并節省計算時間,Hauser對軟件進行編程,使其只關注機器人的髖關節和肩關節。
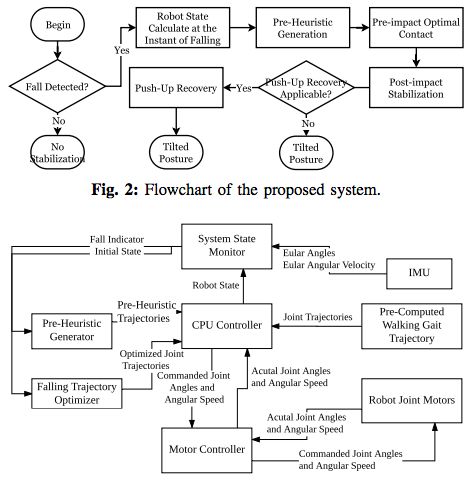
系統硬件框圖及控制流程
只要機器人在跌倒時沒有發生扭曲,穩定算法(stabilization algorithm)就只考慮三個角度:腳到臀部、臀部到肩膀、肩膀到手。機器人必須識別可接近的附近的表面,然后快速計算出最佳的角度組合,才能穩住自己。
在矢狀面和額狀面采用倒立擺模型進行跌落檢測。紅色箭頭表示質量中心的速度。
本文使用的是三連桿模型,如圖所示。機器人被分成三個部分:腿,軀干和手臂,每個部分都被建模為剛性連接。
在最終的解決方案里,當機器人的手接觸到表面時,能將沖擊力降到最低,同時將手或腳滑動的可能性降到最低。該算法進行最佳的猜測,然后用名為direct shooting的方法逐步優化。
實驗中的最優控制器的例子
在當前的狀態下,該機器人擁有的是輸入給它的環境信息,因此無法自行導航。但在不久的將來,Hauser計劃將它升級為大型機器人,擁有能夠看到周圍環境的相機傳感器。
“希望到今年年底之前,我們能夠對這個機器人進行實驗,讓它實際地在一個現場障礙賽道上工作。”Hauser說,“然后,我們將嘗試讓機器人動態地繪制出它周圍的地圖,并且推斷出如何在任意環境中保護自己免于摔倒。”
-
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
算法
+關注
關注
23文章
4607瀏覽量
92840
原文標題:任推不倒!杜克大學這個機器人“小強”自己會扶墻(視頻)
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論