


背景描述
近年來無人機(jī)應(yīng)用市場日趨火熱,無人機(jī)開始被應(yīng)用在多個領(lǐng)域之中,比如航拍,植保,運輸,安防等。隨著應(yīng)用場景的增加,對于無人機(jī)的大腦一飛控,的性能和功能要求也變得越來越高。國內(nèi)具有一大批優(yōu)質(zhì)的無人機(jī)企業(yè),如DJI,零度,億航,極飛等。可是這些企業(yè)的飛控系統(tǒng)并不開源,而開源飛控市場卻基本被國外所壟斷,比如APM, PX4, Autoquad等,國內(nèi)目前還沒有一款開源飛控可以與之抗衡,在國際上也沒有令人熟知的“國產(chǎn)”開源飛控。正是基于開發(fā)出一款世界知名的中國的開源飛控,我從2016年開始了StarryPilot這個項目。飛控的設(shè)計理念是一款輕量,功能強(qiáng)大的飛控,主要面向科研和無人機(jī)行業(yè)應(yīng)用,使得無人機(jī)開發(fā)技術(shù)更加普及,也更容易將無人機(jī)技術(shù)應(yīng)用到各個行業(yè)。
無人機(jī)整機(jī)
Pixhawk
室外定高飛行
Gazebo HITL(硬件在環(huán))仿真
Msh shell系統(tǒng)
開發(fā)環(huán)境
主控:STM32F427 + STM32F100(從控制器)
編譯環(huán)境: Keil MDK5.23
RT-Thread版本: RTT-2.1.0
硬件設(shè)計
硬件采用國外開源的自駕儀Pixhawk(https://pixhawk.org/modules/pixhawk), 如下圖所示。Pixhawk也是目前世界上應(yīng)用最廣,支持的飛控系統(tǒng)最多的開源飛控硬件。
其主要性能參數(shù)如下:
168MHz / 256 MIPS Cortex M4F
14路 PWM/伺服 輸出
冗余電源輸入
外部安全開關(guān)
多色LED指示燈
外置microSD卡槽
傳感器:
ST Micro L3GD20 16位陀螺儀
ST Micro LSM303D 16位加速度計/磁力計
Invensense MPU 6000 三軸加速度計/陀螺儀
MEAS MS5611 氣壓計
接口:
5x UART, 2x CAN, I2C, SPI
DSM/DSM2/DSM-X 衛(wèi)星兼容輸入
PPWM, S-BUS
3.3 和 6.6V ADC輸入
microUSB
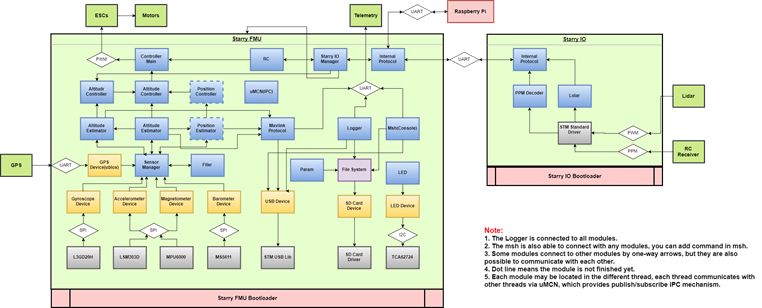
整個系統(tǒng)除了Pixhawk之外,還有一些外接的電子設(shè)備,如無刷電機(jī),GPS,電調(diào),數(shù)傳,RC接收機(jī),Lidar-Lite激光雷達(dá)等。整體的系統(tǒng)框架圖如下圖所示:
軟件設(shè)計
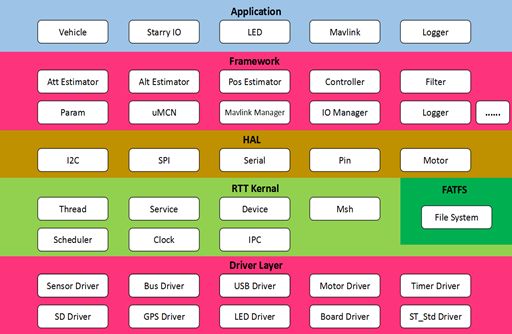
軟件采用分層結(jié)構(gòu)設(shè)計,如下圖所示,從底層到上層分別是Driver層,RTOS(RTT + Fatfs),HAL硬件虛擬層,F(xiàn)ramework層和應(yīng)用層。
一、Driver層
Driver層實現(xiàn)了Pixhawk板載的所有硬件設(shè)備的驅(qū)動,如傳感器設(shè)備(陀螺儀,加速度計,磁力計,氣壓計等),總線設(shè)備(UART, I2C, SPI等),USB,電機(jī)驅(qū)動,SD卡驅(qū)動,GPS驅(qū)動,LED燈以及一些板載設(shè)備的驅(qū)動。各個驅(qū)動以Device的形式向RTT進(jìn)行注冊,并且提供各自的init(), read(), write, ioctrl()函數(shù)供上層調(diào)用。這里僅以hmc5883磁力計的驅(qū)動舉例說明驅(qū)動程序的一般設(shè)計步驟。
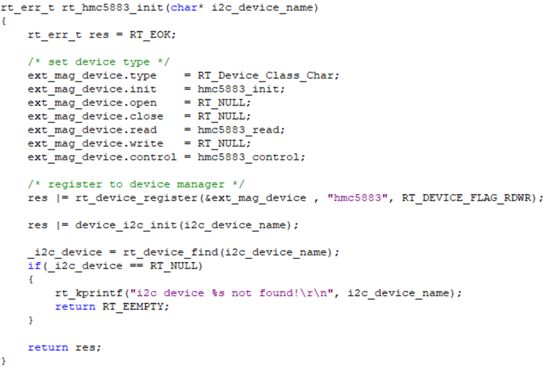
- 設(shè)備初始化函數(shù)
如下為hmc5883的初始化函數(shù)。首先對設(shè)備的功能函數(shù)進(jìn)行函數(shù)指針賦值,這里定義了init(), read()和ioctrl()三個函數(shù)。然后向RTT注冊名為hmc5883的驅(qū)動設(shè)備,上層可以通過查找設(shè)備名的方式來獲取該驅(qū)動設(shè)備。接下來就是給hmc5883設(shè)置對應(yīng)的總線設(shè)備。這里 hmc5883使用的是i2c通信,所以初始化中會為其查找對應(yīng)的i2c設(shè)備。
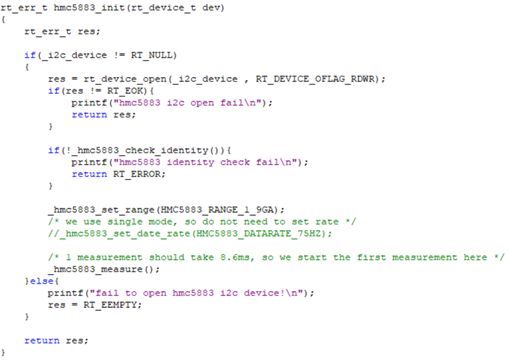
- init()函數(shù)
Init()函數(shù)主要做一些芯片的初始化的工作,包括寄存器配置等。
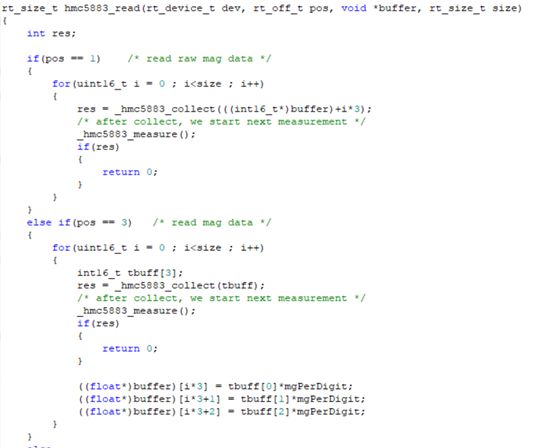
- read()函數(shù)
read()函數(shù)實現(xiàn)設(shè)備數(shù)據(jù)讀取的功能,如原始磁場數(shù)據(jù)和標(biāo)定后的磁場數(shù)據(jù)讀取。
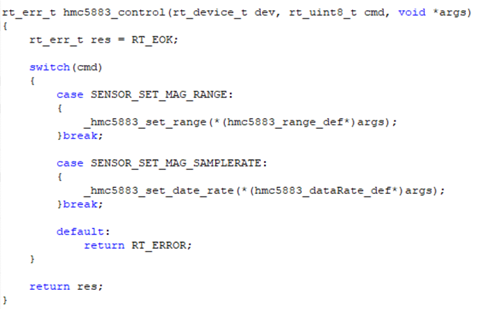
- ioctrl()函數(shù)
Ioctrl()函數(shù)主要實現(xiàn)一些設(shè)備的配置功能,如設(shè)置測量磁場的范圍,采樣頻率等。
二、RTOS層
RTOS采用RT-Thread嵌入式操作系統(tǒng),它的功能強(qiáng)大,除了提供基本的線程調(diào)度,內(nèi)存管理,同步等基本功能外,還提供了如msh的shell系統(tǒng),device設(shè)備驅(qū)動系統(tǒng),使得系統(tǒng)的整體架構(gòu)更加清晰,功能也更加完善。
三、HAL層
HAL層主要是對底層驅(qū)動設(shè)備進(jìn)行進(jìn)一步封裝,將具體的設(shè)備抽象為一個類別的設(shè)備。以串口設(shè)備為例,不同的硬件平臺,串口的底層驅(qū)動會有差異,通過HAL層,將串口設(shè)備封裝為統(tǒng)一的接口,這樣當(dāng)系統(tǒng)移植到不同平臺的時候,上層代碼不需要做任何改變,而只需要將對應(yīng)底層驅(qū)動進(jìn)行簡單替換就行。這將大大降低系統(tǒng)移植的復(fù)雜程度。
四、Framework層
Framework層實現(xiàn)了飛控設(shè)備的主要功能,如姿態(tài)估計,位置估計,控制器,通信,日志管理等等。可以說,這一層是整個系統(tǒng)的核心,大部分的功能模塊都在這一層來實現(xiàn)。
五、Application層
應(yīng)用層是將飛控的各個大的功能進(jìn)行分割,變成一個個小的功能。每個功能在系統(tǒng)中為一個單獨的線程,每個線程負(fù)責(zé)執(zhí)行自己的任務(wù),并且跟其他線程通過IPC進(jìn)行通信。Vehicle線程具有最高優(yōu)先級,執(zhí)行周期為1ms。其負(fù)責(zé)實現(xiàn)無人機(jī)飛行相關(guān)的所有功能,如狀態(tài)估計和電機(jī)的控制。
啟動流程
下面介紹一下系統(tǒng)的啟動流程. 啟動流程沿用RTT提供的原始結(jié)構(gòu)。首先在rtthread_startup()函數(shù)中進(jìn)行RTOS的一些初始化,然后進(jìn)入到rt_application_init()中。 在這個函數(shù)中會建立一個init的初始線程,在這個線程中,會對飛控各個模塊進(jìn)行初始化的工作。在初始化完成之后,會根據(jù)Application層的定義,建立各個線程,并喚醒,最后將init線程自己給銷毀掉,避免不必要的內(nèi)存消耗。
演示視頻
控制算法和飛行效果測試( ADRC vs PID )
項目特色
使用RT-Thread嵌入式操作系統(tǒng), Fatfs文件系統(tǒng),完整的系統(tǒng)功能支持(如跨進(jìn)程通信,文件管理,參數(shù)系統(tǒng)等)
基于Pixhawk硬件平臺開發(fā),完美支持Pixhawk硬件
ADRC控制和PID(串級)控制
支持Mavlink協(xié)議(QGC地面站)
支持Gazebo硬件在環(huán)(HITL)仿真
Msh指令系統(tǒng),提供豐富以及可擴(kuò)展的系統(tǒng)指令
Log日志系統(tǒng),方便抓取飛行日志信息,并提供相應(yīng)的日志查看工具。
基于最小二乘法的最優(yōu)橢球擬合校準(zhǔn)算法(可校準(zhǔn)零偏誤差,縮放誤差,非正交誤差),可用于磁力計和加速度計的校準(zhǔn)。
-
開源飛控
+關(guān)注
關(guān)注
1文章
7瀏覽量
5483
原文標(biāo)題:【周四RTOS專欄】基于RT-Thread的開源飛控StarryPilot
文章出處:【微信號:elecfans,微信公眾號:電子發(fā)燒友網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
RT-Thread的C語言編碼規(guī)范
RT-Thread榮獲2025優(yōu)秀開源項目 | 新聞速遞

【資料】基于RT-Thread的四軸飛控項目匯總
RT-Thread編程指南
RT-Thread AI kit開源:輕松實現(xiàn)一鍵部署AI模型至 RT-Thread

【RT-Thread開源作品秀】基于RT-Thread的星務(wù)平臺研究
RT-Thread全球技術(shù)大會:RT-Thread開源重塑軟件發(fā)展新生態(tài)
英飛凌加入RT-Thread開源共同體 為物聯(lián)網(wǎng)開發(fā)者提供系統(tǒng)級解決方案
RT-Thread 編程風(fēng)格
RT-Thread文檔_RT-Thread 潘多拉 STM32L475 上手指南
基于RT-Thread Studio學(xué)習(xí)

開源共生 商業(yè)共贏 | RT-Thread 2024開發(fā)者大會報名啟動!

RT-Thread睿賽德開源無人機(jī)領(lǐng)域硬核飛控上線!| 產(chǎn)品動態(tài)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論