


說起PID肯定有點陌生,其實在生活中多方面都有體現,只是沒有站在專業的角度看問題,說個常見的例子就應該明白。
儲水箱應該大家熟悉,當儲水箱進水口閥門開始水注入,當儲水箱出水口閥門開啟水流出使用。雖然這個過程人可以完成,但是重復的事做久了就會枯噪無味。水箱注入水時它的液位高低我們可以通過眼睛看,液位高了把出水口關閉,出水口閥門開啟,當液位低了在開啟進水口閥門,關閉出水口。比如現在我想把液位維持在一個高度,那么就要我們手動去調進出水口閥門確實可以做到,可以說我們人為的調節過程是無法抗干擾的,液位一波動那又得去調,很麻煩。為了解決這些問題人就想出了PID控制,即能控制穩定還能抗外界干擾。
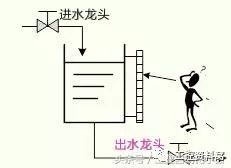
現在要實現我們人為控制過程,那就的用儀表來代替我們的手眼睛大腦等。液位變送器可以取代眼睛,它可以連續檢測。執行機構可以取代手,它可以去轉動閥門。控制器取代大腦,它可以去分析處理數據,然后再給執行機構下達任務。
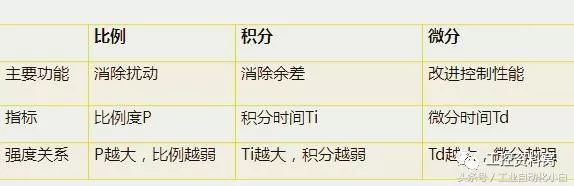
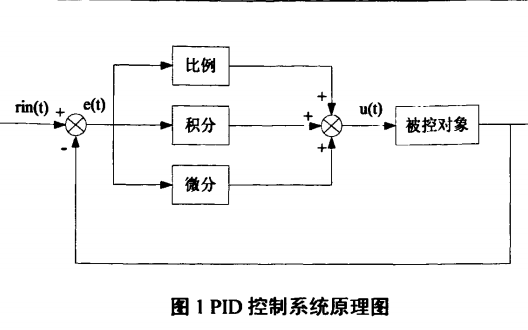
PID控制器有四種控制規律,P控制規律、PI控制規律、PD控制規律、PID控制規律。P、I、D的通俗理解,P是控制器輸出信號隨輸入偏差信號e按一定比例關系的變化控制規律,相當于今天發生的事。I是控制器輸出信號隨輸入偏差信號e積分成正比例關系的變化控制規律,相當于昨天發生的事。D控制器輸出信號隨輸入偏差信號e微分成正比例關系的變化控制規律,相當于明天發生的事。
工業自動化控制中PID的應用和整定方法!從圖中看P控制規律,它的作用就是消除擾動,那么就是當前發生的事,所以為了消除擾動馬上用比例度。I控制規律作用就是消除余差,余差不是現在有的也不是以后有的,是以前積累的,那么的用積分消除,也就是說昨天的事。D控制規律作用就是超前控制,就是還沒有發生的事給它提前準備所以得用微分控制,也就是明天發生的事。
經驗湊式法,進行新操作之前確保前面的過渡過程穩定才能進行,在控制器上調參數遵守由弱到強的原則,控制變量需要多個控制規律,遵守先比例后積分最后微分。
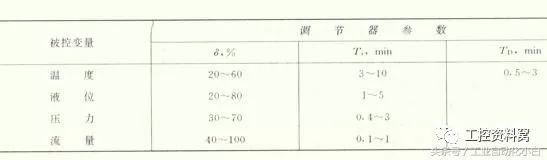
在參數整定過程中圖中的參數只能作為一個初始參考值,具體的情況要根據實際調節中稍做變化,找到最佳參數。
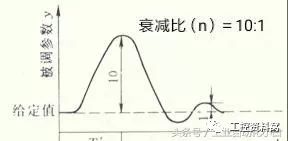
定值系統最理想的曲線
隨動系統最理想的曲線
當一個曲線穩定下來是否達到理想,需要根據它的性能指標判定。
1、最大偏差(A),指曲線的最大波峰或波谷的值與設定值的差。
2、超調量(Q),指被控變量偏離新穩定值的百分數。
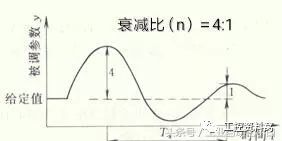
3、衰減比(n),指過渡曲線兩個相鄰的波峰或波谷的振幅之比,振幅就是被控變量偏離新穩態值的差。
4、余差(C),指新穩態值與目標值的差。
5、過渡時間(t),指從干擾開始到新穩態時所需要的時間。
6、振蕩周期(T),指過渡曲線同方向相鄰之間的時間。
7、峰值時間(tp),指從干擾開始到第一個波峰或波谷所需時間。
8、上升時間(tr),指過渡曲線開始變化到新穩態所需時間。
由上面八點可以確定三種系統性能,穩定性的性能指標(A、Q、n)、準確性性能指標(C),快速性性能指標(tr)。其中比例積分時間減小,會加大系統振蕩,同時穩定性變差,微分時間加大在小范圍會使系統穩定性變好,但也容易引起振蕩。
-
PID
+關注
關注
37文章
1482瀏覽量
88254 -
工業自動化
+關注
關注
17文章
2760瀏覽量
68398
原文標題:工業自動化控制中PID的應用和整定方法
文章出處:【微信號:gongkongworld,微信公眾號:工控資料窩】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄

基于MATLAB的PID\PID參數自整定方法概述







 工商網監
工商網監

評論