 自動剎車輔助系統(AEB)是真的能讓人完全放心的技術嗎?
自動剎車輔助系統(AEB)是真的能讓人完全放心的技術嗎?
據外媒7月18日報道,具有行人檢測功能的自動緊急制動系統( AEB )是現代化汽車必須具備的安全功能之一,但仍然存在盲區。無論是由反射性標志引起的誤報,還是演示過程中系統故障引起的誤報,都可能會誤導半自動安全輔助功能。
隨著汽車保有量的不斷增加,汽車安全也被提升到了前所未有的高度,除了我們熟知的安全帶、安全氣囊外,諸如ABS、EBD、ESP、TPMS等這樣的主動安全系統也逐漸成為汽車的標配。
這兩年,在交通部政策的推動下,部分L1和L2級別的ADAS功能被要求在某些商用車型中強制安裝,包括AEB(自動緊急剎車)。但是自動剎車輔助系統(AEB)是真的能讓人完全放心的技術嗎?
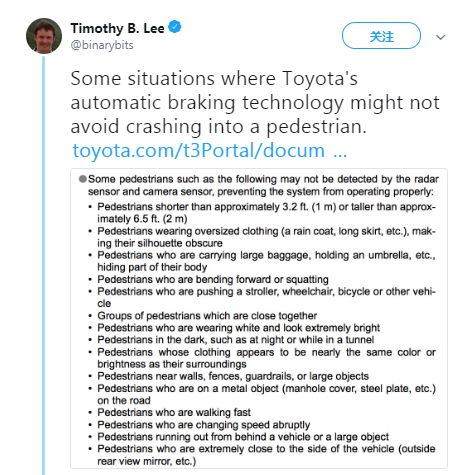
近日,豐田在車主手冊中公布的一份清單強調了行人檢測軟件的盲區。而這些局限性并不是豐田汽車獨有的,大多數品牌都可能存在這些盲區。
行人檢測軟件可能無法準確識別的情況如下:
身高低于1米或高于2米的行人;
穿著超大號服裝(如雨衣)的行人(輪廓模糊);
提著大件行李、打傘的行人(容易遮擋住部分身體);
彎著腰或蹲下的行人;
緊密相鄰的一群行人;
穿著白色衣服,反光太過明亮的行人;
黑暗中的行人(如夜間或隧道中);
衣著與周圍環境顏色、亮度幾乎相同的行人;
靠近墻壁、柵欄、護欄或大型物件的行人;
站在井蓋等金屬物體上的行人;
走得很快,或者突然改變速度的行人;
從車輛或大型物體后面走出來的行人。
豐田是依靠雷達傳感器和攝像頭來實現半自主輔助駕駛的,包括AEB、雷達巡航控制和車道保持輔助等ADAS功能。其實不光豐田如此,即使最頂級豪車的AEB系統都有很大的局限性,在很多工況下是無效的,如果仔細翻閱汽車說明書就能深深體會這一點。
上圖是某品牌近百萬頂級豪車的說明書,上面就很明確指出,在某些情況下可能完全無法檢測到車輛、大型動物、行人和騎車人。這個特殊情況就是在車輛、大型動物、行人和騎車人在被前車或側車遮蓋住視線,前車不再遮擋后突然出現,系統無法及時識別,特斯拉幾次事故都是如此。然后特別指出黑暗環境下,摩托車可能完全無法檢測到。
這份說明書也明確指出傳感器有限制,AEB的最佳工況在相對時速50公里時。對于緩慢移動的車輛,系統最佳工作時速在70公里,超過70公里AEB是無效的。
AEB系統的局限性
首先AEB系統有明顯的速度上限和下限,一般來說單純以毫米波雷達為傳感器的AEB系統最高工作上限為時速30公里,以單目攝像頭為核心傳感器的AEB系統最高工作上限為時速40公里,單目與毫米波雷達融合的AEB最高工作上限為時速70公里,以雙目為核心傳感器的AEB系統最高工作上限為時速90公里。同時還有一個最低下限。以單目為核心傳感器的工作下限為時速8-10公里,毫米波雷達為時速5公里,攝像頭與毫米波雷達融合為時速3公里,雙目為3公里。
其次,目前絕大多數AEB都是只針對車輛的,也有少數針對對行人和騎車人。或者說探測行人需要比較長的時間,碰撞時速度仍然較高。
第三,AEB對突然出現的靜止物體無效。車輛、大型動物、行人和騎車人,在被前車或側車遮蓋住視線,前車不再遮擋后突然出現,AEB系統無法及時識別,特斯拉幾次事故都是如此。
第四,盲區明顯,車輛轉彎時,AEB基本是無效的。迎面而來的交叉車流或轉彎車流,對面來車突然變道等等,AEB也是無效的。
第五,天氣和光線的局限。對于攝像頭為核心的AEB系統,低照度情況下基本無效,高亮度如正對陽光也會無效。
AEB的技術實現方法
這些局限與其實現方法有很大關系。目前,實現AEB的技術主要有三類,分別是基于視覺傳感器、毫米波雷達和激光雷達。由于成本限制因素,國內主要使用前兩種方式。視覺傳感器和毫米波雷達實現對車輛的AEB功能的原理不同:毫米波雷達主要是通過對目標物發送電磁波并接收回波來獲得目標物體的距離、速度和角度。視覺方案稍復雜,以單目視覺方案為例,它需要先進行目標識別,然后根據目標在圖像中的像素大小來估算目標的距離。
典型的AEB系統構成
對于靜止物體,傳感器融合是不可缺少的。數據從傳感器數據級(Data)、傳感器特征級(Feature)、決策級(Decision)三個融合層級慢慢過渡,執行器的反應時間和處理器的反應時間都會耗費大量的時間,影響數據的即時性。再加上這些傳感器可能會受到灰塵、道路污垢堆積、眩光或復雜視覺場景(人們站在異形物體前,或打著傘)的影響,潛在地損害了數據的有效性。
AEB測試
你會發現,號稱“自動駕駛技術即將落地量產”的今天,一個簡單的AEB都做不完善。關于AEB的測試,網絡上整理過一個失敗集錦。一套完整的AEB開發系統最少需要2年的開發周期,有些廠家急功近利,取消最關鍵的驗證測試和場地測試,AEB成了一個不安全因素。
傳統的AEB測試都是車與車之間,歐洲NCAP定義了三個場合,第一種是CCRs,Car-to-Car Rear Stationary。
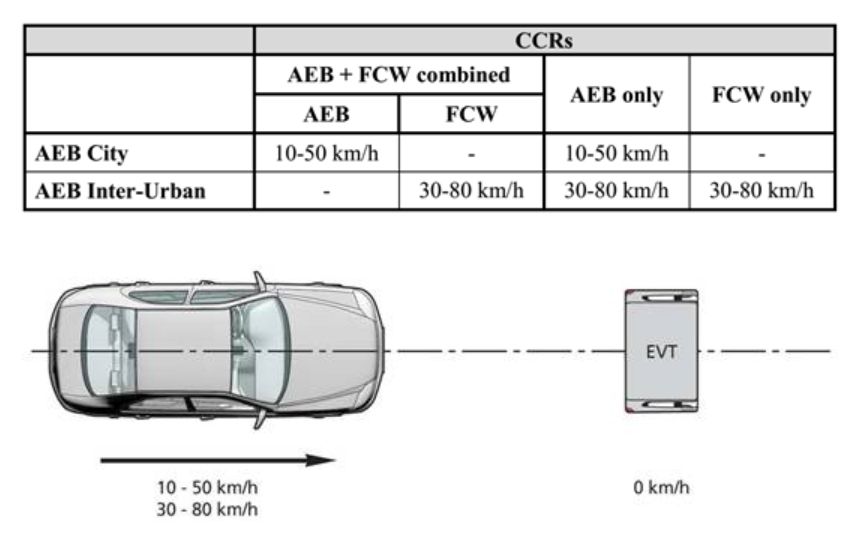
這種情況下前車(也就是假車)靜止。
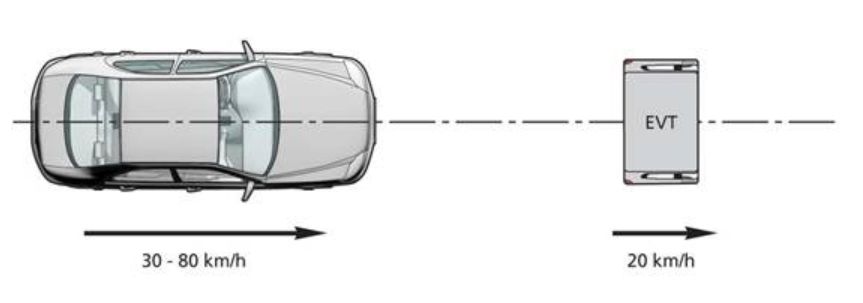
第二種是Car-to-Car Rear Moving (CCRm),這時前車速度穩定于時速20公里。
第三種是Car-to-Car Rear Braking(CCRb),前車與后車速度都保持時速50公里,距離在12-40米之間,前車開始減速,減速度在2-6m/s2之間。
最早將行人AEB加入測試的是歐洲NCAP。只要能在目標車(假車)或人偶(假人)前有減速,歐洲NCAP都會加分。不過這在大部分中國人看來,最后只要發生碰撞了,就是無法接受的。然而如果將避免碰撞作為加分標準,那就恐怕大部分車都無法加分了。
AEB行人防撞功能評價內容主要包含三項場景 :(1) 成人遠端接近場景、(2) 成人近端接近且車輛 25% 偏置與 75% 偏置碰撞場景、(3) 兒童近端接近場景。主要用于模擬車輛行駛于一般市區道路,駕駛者因分心未注意前方路況,而又有行人想要橫越馬路之情形。配備 AEB 行人偵測功能之車輛,應能偵測前方行人,在危險時能進一步采取剎車行為降低危害。Euro-NCAP設定不同的試驗場景,且有不同的測試車速與行人移動速度,在測試時是否發生碰撞或撞擊前的減速效果也給予不同之評分。此外,針對車輛 AEB 系統之使用接口功能,也給予不同的分數。
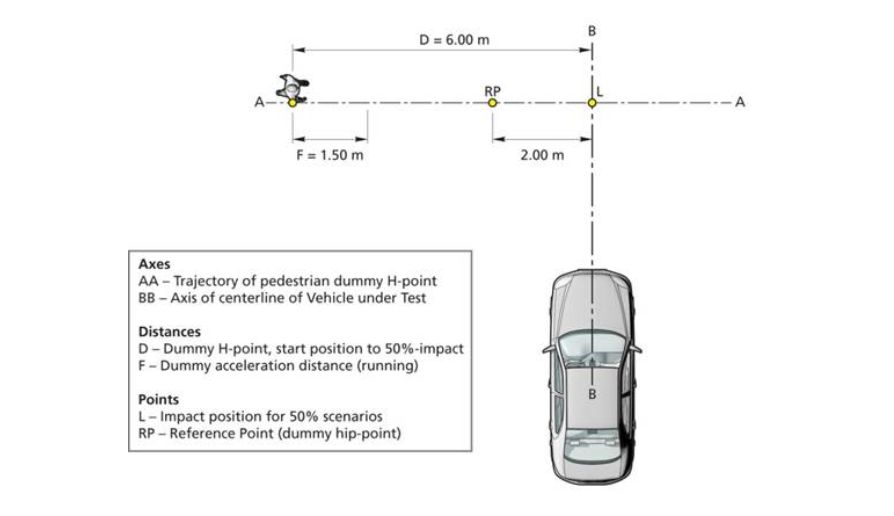
行人遠側AEB測試布局圖
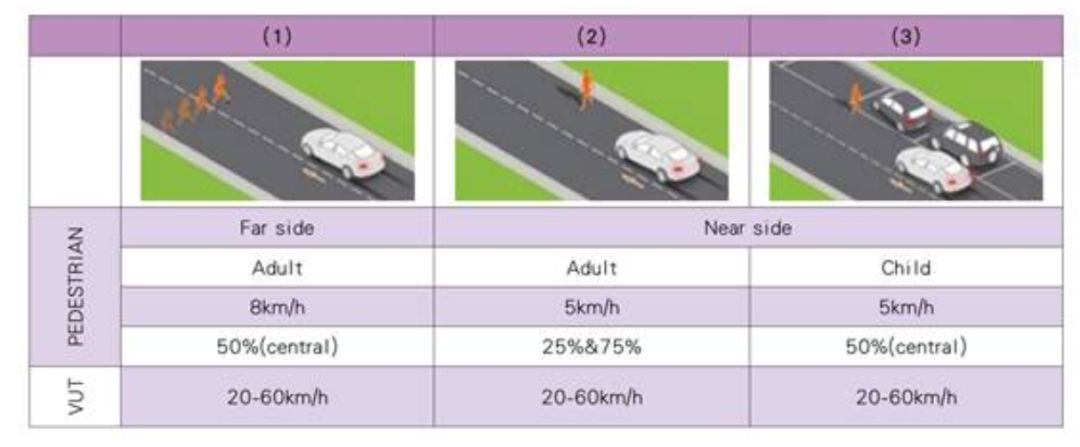
行人AEB測試的三種場景
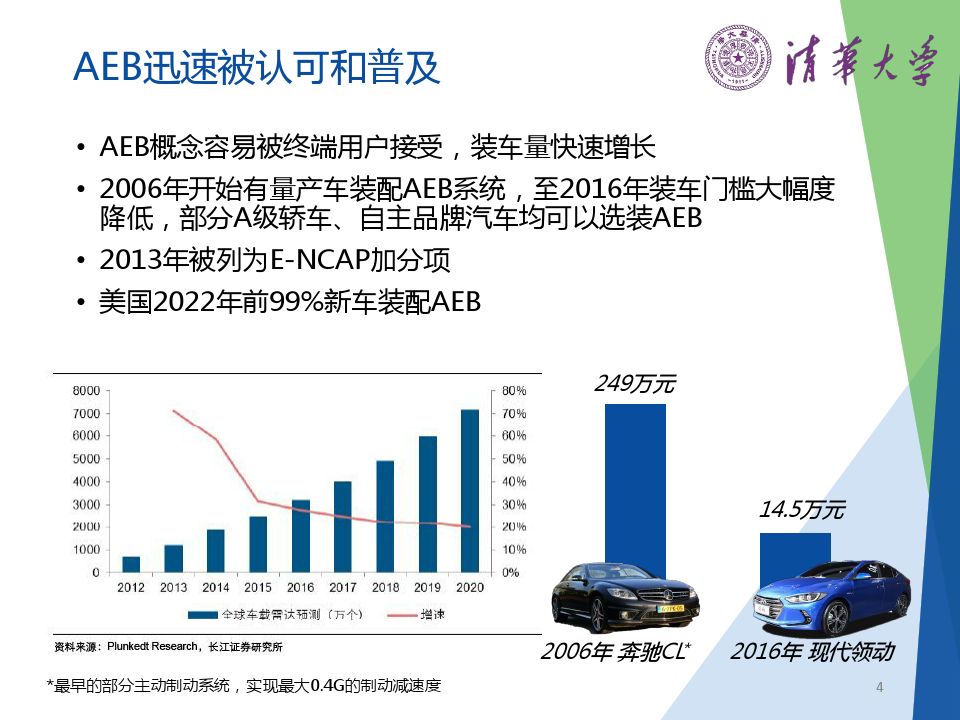
盡管有很多局限性,但AEB概念容易被終端用戶接受,裝車量快速增加。這項技術慢慢成為“標配”的項目之一。歐盟國家已經于2014年全面要求新車必須配備AEB系統,否則無法從E-NCAP獲得五星安全認證。美國預計2022年前99%新車裝配AEB,市場潛力巨大。
然而我們要正視說明書里AEB的局限性,自動駕駛或者駕駛輔助系統在城市應用時需要保守謹慎進行,從而減少碰撞、意外或傷害。
-
傳感器
+關注
關注
2551文章
51200瀏覽量
754519 -
毫米波雷達
+關注
關注
107文章
1047瀏覽量
64414 -
AEB
+關注
關注
1文章
51瀏覽量
19907
原文標題:豐田:行人檢測系統有盲區,AEB并非完全可靠
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
IIHS:奔馳、沃爾沃和特斯拉新車裝備AEB系統比例最高
AEB安全性受關注,高速工況AEB何時能成為標配?

汽車防撞系統設計可以實現自動剎車功能
奔馳新車所采用的防碰撞輔助系統和自適應剎車系統
自動駕駛技術對連接器提出了更高的要求
深度LDW+FCW+PCS+AEB系統
聊聊自動緊急制動系統AEB的話題
理性看待AEB自動緊急剎車系統設計

OTA技術如何助力AEB系統進化呢?





 工商網監
工商網監
評論