 未來,自動駕駛將如何駛向遠方?
未來,自動駕駛將如何駛向遠方?
自動駕駛的故事講了這么久,落地卻仍存在諸多困難。未來,自動駕駛將如何駛向遠方?
近日,百度公司董事長兼CEO李彥宏宣布其L4級無人車“阿波龍”正式量產,即將發往國內北京、雄安、深圳、平潭、武漢等地進行商業化運營。市場一片驚呼。
自動駕駛,近幾年汽車領域最火熱的風口之一。麥肯錫最新研究報告顯示,至2030年,中國自動駕駛相關的新車銷售及出行服務創收將超過5000億美元。
傳統主機廠、互聯網巨頭、出行公司紛紛擁抱市場、卡位圈地。大量創業者也帶著華麗麗的PPT一股腦兒地涌入自動駕駛行業,各自都在說著自己的精彩故事。在他們身后,資本的力量不斷加碼。根據中國電動汽車百人會的統計,2015年到2017年11月,自動駕駛汽車相關領域的投融資事件共193起,金額達1438億美元。
無人車量產的消息鋪天蓋地,市場情緒被不斷調動,自動駕駛的時代仿佛明天就要來了。然而,隨著今年3月18日,Uber自動駕駛測試車在美國亞利桑那州的一撞,一切似乎都冷靜了。
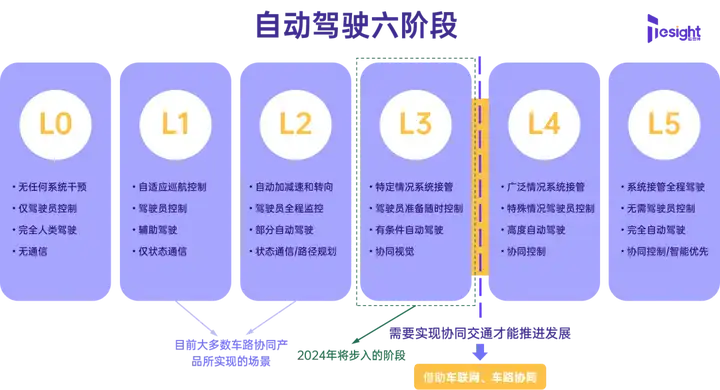
百度無人車量產的消息就像一顆石子投入了水中,又激起了大片水花,賺足了眼球的同時,也引起了業內人士的質疑。按照美國汽車工程師協會(SAE)的定義,汽車自動駕駛系統分為L0~L5共6個級別,在這樣的等級劃分中,L4級指高度自動駕駛,即在大多數場景下自動駕駛能夠實現。“阿波龍”是否真正能達“標”,暫時得打一個問號。
國科嘉和基金管理合伙人王戈最近在第29屆國際電氣與電子工程師協會(IEEE)智能車大會上的一段話引起了業內的共鳴。他說,對于實現完全自動駕駛的時間,主機廠一般比較保守,至于有人說五年北京街頭就能實現全自動駕駛,基本屬于“屁股決定腦袋”。
自動駕駛的故事講了這么久,落地卻仍存在諸多困難。未來,自動駕駛將如何駛向遠方?
究竟選擇撞向哪兒
“在碰撞無可避免的情況下,無人車會撞向一個人的一側還是撞向一群人的一側?”“往前行駛會撞到人,往旁邊讓會撞到欄桿而導致車內乘客受傷,無人車會怎么選擇?”
“撞向哪兒”是一個經典的法律倫理問題。在有關智能駕駛的論壇中,業內人士總喜歡拿這個問題來說明智能駕駛技術的不成熟。去年,中科院自動化所復雜系統管理與控制國家重點實驗室主任、自動化學會副理事長兼秘書長王飛躍在接受中國青年報·中青在線記者采訪時,用“初中生”來形容當時無人車的發展情況。今年,面對同樣的問題,他說當時的預估還是高了,“它離(初中)畢業還有很長一段距離。”
很長一段時間,國內對自動駕駛技術的發展都過于樂觀與自信,王戈記得,三年前和自動駕駛的創業團隊聊天,許多人考慮的是直接往全自動駕駛方向發展還是像傳統主機廠一樣漸進式發展,全然沒考慮底層技術的研發問題。“企業拼命吹氣球,也不管吹不吹破,都急于變現,恨不得明天就上路。”王飛躍也一臉激動。隨著自動駕駛事故的頻發,這樣的泡沫總算慢慢消退了。
目前,業內多數專家認為,我們當前的自動駕駛技術基本介于L2級和L3級之間,從整體的研究發展來講,L2、L3級的研發主要集中在企業,L4、L5級集中在科研機構,其中需要突破的瓶頸還很多。
“無人車關鍵要解決兩大問題,場景理解和自主運動”,西安交通大學人工智能與機器人研究所的崔迪瀟博士表示,場景理解的核心是要處理傳感的數據,在傳感數據融合的基礎上給出場景結構化描述,并進行幾何、物理及語義層次上的推理,這些將會形成無人車自主運動的時空約束,自主運動則要根據時空約束來適應場景的動態變化,控制車輛。而現在,“無人車的目的性和主動性都不足”,崔迪瀟表示,現在的無人車計算效率低、環境適應性差、自學能力不足,在復雜的交通環境中遠遠不及人類駕駛員。
想讓無人車變得更智能,底層技術短時間突破不了,技術人員只能讓它不斷去學習,積累數據。他們正在不斷給無人車加裝雷達以期它“看”得更清楚,一幅幅地圖也不斷被無人車的“大腦”所記憶,但復雜的交通場景根本描述不完,種種突發狀況的發生也讓無人車手足無措,同時,高昂的路測成本也令數據的收集變得困難。
在本世紀初,王飛躍首次提出了基于社會物理信息系統(CPSS)的平行駕駛框架,在平行駕駛的框架下,當人類司機駕著物理車輛奔馳時,作為“軟件機器人”的智能代理,也開著對應的“虛擬車”同時在虛擬世界中奔馳。虛擬場景的構建大大減少了數據收集的成本,但無法主動學習、分析場景做出決策始終是現階段的無人車邁不過去的坎兒。
警惕自動駕駛中的“馬糞問題”
雖然無人車的落地仍困難重重,但不可否認,這幾年,智能駕駛的發展取得了相當的進步。王飛躍記得,1997年,加州圣地亞哥舉行Demo'97(TheNAHSC1997TechnicalFeasibilityDemonstration)無人車集中演示時,一輛車的成本要上百萬美金,而現在只要幾百萬元人民幣。國內無人車剛開始路測時,速度還沒有人走得快,現在已經能開幾十碼。技術每天都在變化,有關智能駕駛的各種研究、討論也多了起來,王飛躍提醒,在討論問題時要警惕自動駕駛中的“馬糞問題”。
100多年前,馬是人們出行的主要交通工具,當時在倫敦、紐約這些大城市,有十幾萬匹馬在維持著整個城市的運轉。隨著人口的增加,人們生活水平的提高,對馬的需求也越來越大,隨之而來的是城市的馬糞該怎么處理的問題。據有關數據顯示,當時,倫敦的馬每天能產生3000噸馬糞,30萬升的馬尿。1894年,《泰晤士報》預測,在接下來的50年里,倫敦將被高達9英尺的馬糞淹沒。
一場“馬糞危機”成了城市的噩夢。1898年,紐約市主辦了首屆國際城市規劃會議,其中最重要的議題就是馬糞問題,因為全球各地的城市經歷著同樣的“馬糞危機”。但經過幾天討論,會議未找出任何解決方案,只能草草收場。后來,隨著汽車的普及,“馬糞危機”消失了。
“在人工智能時代,當我們研究討論如何解決車輛的無人駕駛問題時,不斷討論如何讓無人車在與有人車混開情況下長久時間內不出現事故,這是否正是當下遇到的‘馬糞問題’?”王飛躍表示,當無人車足夠智能之后,就把“有人車”代替掉了,“就像汽車把馬車代替掉一樣,很多問題是不存在的。”
王飛躍告訴中國青年報·中青在線記者,現在有些專家的研究方向是錯的,他們用這些錯誤的假設來告訴自動駕駛的研發團隊要注意哪些問題,而“所謂的問題根本不是問題”。這種研究不僅耗費時間而且容易走彎路。
在他的理念中,未來無人車會普及,而“有人車”會慢慢失去路權,只會在一些賽車場見到,整個城市的生態會慢慢改變,無人車本身就會成為一個生活場景。
大海里如何養出“鯨魚”
在自動駕駛技術全面升級之前,很長一段時間,無人車只能在特定場景下使用,在業內人士看來,這是一片藍海,也是無人車最快能商用的地方,價值巨大。“找特定場景扎扎實實做下去”也是王飛躍對自動駕駛創業企業的建議。他認為,礦山、物流、市政、碼頭四個場景是最適合無人車落地的,也是急需無人化的。
慧拓智能機器有限公司副總裁王健曾多次考察露天煤礦,“條件非常艱苦”是他對礦山工作的評價。“人開著礦卡沿著整個山頂盤旋著一圈一圈下到坑底,然后剝離土方,再一圈圈上去,開到排土場再把土倒掉,工作環境很惡劣。”王健說,礦區作業環境比較危險,但工作路線比較單一,這樣的場景就很適合無人駕駛,而以現在平行駕駛汽車的技術水平,完全能勝任這樣場景下的工作,“國外礦山已經出現無人車應用案例了”。
除了做特定場景的整車,想要在自動駕駛這片大海中養出“鯨魚”,王戈認為,往自動駕駛的上游找機會也能以點破面。
“如果要創業我們就做單點化,比如信號系統、巡航輔助、光學設備、控制器……這樣就避免了跟行業巨頭發生直接的競爭。”王戈表示,主機廠關注整體的投入產出比的問題,一個配件想做好至少需要研發兩三年時間,耗費的人力物力都很大,這時他們就會選擇“拿來主義”,“這是創業非常好的點。”
另外,王戈建議從整體宏觀和生態圈的角度考慮創業的項目,做融合的設計方案也很好。隨著行業的變遷,工程化和集成化變得越來越重要,“大家做好自己那個部分的同時,別忘了在客廳留幾個門和別的地方接口,這很關鍵。”
除此之外,王戈認為,場景數據是自動駕駛企業制勝的根本,決策算法是企業的核心競爭力,這兩個方向都是深海,至于會不會成為其中的巨鯨,就要看誰更愿意沉下心來做了。“講故事沒有關系,很正常,也是促進整個行業和產業成熟的方法,但是別講故事講得自己真信了,這就麻煩了。”
-
自動駕駛
+關注
關注
784文章
13839瀏覽量
166556 -
無人車
+關注
關注
1文章
302瀏覽量
36491
原文標題:自動駕駛:眼前僅有駕駛 自動尚在遠方
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
重塑線控底盤技術:自動駕駛的未來支柱
自動駕駛汽車安全嗎?


自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術



自動駕駛技術進展及其對未來出行的影響
自動駕駛的未來之路:智能網聯與單車智能的交融
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
駛向L3級自動駕駛:車路協同





 工商網監
工商網監
評論