") 史上最全的西門子脈沖方式匯總
史上最全的西門子脈沖方式匯總
基本指令部分:
脈沖輸出指令(PLS)用于在高速輸出(Q0.0和Q0.1)上控制脈沖串輸出(PTO)和脈寬調(diào)制(PWM)功能。
1、PWM波
PWM產(chǎn)生一個(gè)占空比變化周期固定的脈沖輸出。可以以微秒或者毫秒為單位指定其周期和脈沖寬度:
周期: 10 μs到65,535 μs或 2ms到65,535 ms
脈寬時(shí)間:0 μs到65,535μs或 0ms到65,535 ms

注:脈寬≥周期值占空比是100%:連續(xù)接通輸出。
脈寬=0占空比是0%:連續(xù)關(guān)閉輸出。
周期<2個(gè)時(shí)間單位將周期缺省地設(shè)定為2個(gè)時(shí)間單位。
1.1有兩個(gè)方法改變PWM信號(hào)波形的特性:
(1)同步更新:如果不要求改變時(shí)間基準(zhǔn),則可以使用同步更新。利用同步更新,信號(hào)波形特性的變化發(fā)生在周期邊沿,提供平滑轉(zhuǎn)換。
(2)異步更新:通常,對(duì)于PWM操作,脈沖寬度在周期保持不變時(shí)變化,所以不要求改變時(shí)間基準(zhǔn)。但是,如果需要改變PTO/PWM發(fā)生器的時(shí)間基準(zhǔn),就要使用異步更新。異步更新會(huì)造成PTO/PWM功能被瞬時(shí)禁止,和PWM信號(hào)波形不同步。這會(huì)引起被控設(shè)備的振動(dòng)。由于這個(gè)原因,建議采用PWM同步更新。選擇一個(gè)適合于所有周期時(shí)間的時(shí)間基準(zhǔn)。
1.2特點(diǎn):周期和脈寬都是以時(shí)間為單位特別是脈寬不是固定的0-255或者0-512
2、脈沖串操作(PTO)
TO按照給定的脈沖個(gè)數(shù)和周期輸出一串方波(占空比50%)。PTO可以產(chǎn)生單段脈沖串或者多段脈沖串(使用脈沖波形)。可以指定脈沖數(shù)和周期(以微秒或毫秒為增加量):
脈沖數(shù)目:1到4,294,967,295
周期: 10 μs到65,535 μs或 2ms到65,535 ms。

周期<2個(gè)時(shí)間單位將周期缺省地設(shè)定為2個(gè)時(shí)間單位
脈沖個(gè)數(shù)=0將脈沖個(gè)數(shù)缺省地設(shè)定為1個(gè)脈沖
PTO功能允許脈沖串“鏈接”或者“排隊(duì)”。當(dāng)當(dāng)前脈沖串輸出完成時(shí),會(huì)立即開始輸出一個(gè)新的脈沖串。這保證了多個(gè)輸出脈沖串之間的連續(xù)性。
2.1 PTO脈沖串的單段管道
在單段管道模式,需要為下一個(gè)脈沖串更新特殊寄存器。一旦啟動(dòng)了起始PTO段,就必須按照第二個(gè)信號(hào)波形的要求改變特殊寄存器,并再次執(zhí)行PLS指令。第二個(gè)脈沖串的屬性在管道中一直保持到第一個(gè)脈沖串發(fā)送完成。在管道中一次只能存儲(chǔ)一段脈沖串的屬性。當(dāng)?shù)谝粋€(gè)脈沖串發(fā)送完成時(shí),接著輸出第二個(gè)信號(hào)波形,此時(shí)管道可以用于下一個(gè)新的脈沖串。重復(fù)這個(gè)過程可以再次設(shè)定下一個(gè)脈沖串的特性。除去以下兩種情況之外,脈沖串之間可以作到平滑轉(zhuǎn)換:時(shí)間基準(zhǔn)發(fā)生了變化或者在利用PLS指令捕捉到新脈沖之前,啟動(dòng)的脈沖串已經(jīng)完成。
特點(diǎn):可以實(shí)現(xiàn)輸出多個(gè)單端脈沖中間無需停止
2.2 PTO脈沖串的多段管道
在多段管道模式,CPU自動(dòng)從V存儲(chǔ)器區(qū)的包絡(luò)表中讀出每個(gè)脈沖串的特性。在該模式下,僅使用特殊存儲(chǔ)器區(qū)的控制字節(jié)和狀態(tài)字節(jié)。選擇多段操作,必須裝入包絡(luò)表在V存儲(chǔ)器中的起始地址偏移量(SMW168或SMW178)。時(shí)間基準(zhǔn)可以選擇微秒或者毫秒,但是,在包絡(luò)表中的所有周期值必須使用同一個(gè)時(shí)間基準(zhǔn),而且在包絡(luò)正在運(yùn)行時(shí)不能改變。執(zhí)行PLS指令來啟動(dòng)多段操作。
每段記錄的長度為8個(gè)字節(jié),由16位周期值、16位周期增量值和32位脈沖個(gè)數(shù)值組成。表中給出了包絡(luò)表的格式。您可以通過編程的方式使脈沖的周期自動(dòng)增減。在周期增量處輸入一個(gè)正值將增加周期;輸入一個(gè)負(fù)值將減少周期;輸入0將不改變周期。

2.3計(jì)算包絡(luò)表的值
2.3.1PTO發(fā)生器的多段管道功能在許多應(yīng)用中非常有用,尤其在步進(jìn)電機(jī)控制中。例如:您可以用帶有脈沖包絡(luò)的PTO來控制一臺(tái)步進(jìn)電機(jī),來實(shí)現(xiàn)一個(gè)簡單的加速、勻速和減速過程或者一個(gè)由最多255段脈沖波形組成的復(fù)雜過程,而其中每一段波形都是加速、勻速或者減速操作。圖中的示例給出的包絡(luò)表值要求產(chǎn)生一個(gè)輸出信號(hào)波形包括三段:步進(jìn)電機(jī)加速(第一段);步進(jìn)電機(jī)勻速(第二段)和步進(jìn)電機(jī)減速(第三段)。

對(duì)于該實(shí)例:啟動(dòng)和最終脈沖頻率是2kHz,最大脈沖頻率是10 kHz,要求4000個(gè)脈沖才能達(dá)到期望的電機(jī)旋轉(zhuǎn)數(shù)。由于包絡(luò)表中的值是用周期表示的,而不是用頻率,需要把給定的頻率值轉(zhuǎn)換成周期值。因此,啟動(dòng)(初始)和最終(結(jié)束)周期時(shí)間是500 μs,相應(yīng)于最大頻率的周期時(shí)間是100 μs。在輸出包絡(luò)的加速部分,要求在200個(gè)脈沖左右達(dá)到最大脈沖頻率。也假定包絡(luò)的減速部分,在400個(gè)脈沖完成。
De給定段的周期增量=|ECT--ICT|/Q
其中:End_CTseg =此段的結(jié)束周期
Init_CTseg =此段的初始周期
Quantityseg =此段中的脈沖數(shù)量
利用這個(gè)公式,
分段1(加速):增量周期=--2
分段2(恒速):增量周期=0
分段3(減速):增量周期=1
假定包絡(luò)表存放在從VB500開始的V存儲(chǔ)器區(qū),表給出了產(chǎn)生所要求信號(hào)波形的值。該表的值可以在用戶程序中用指令放在V存儲(chǔ)器中。一種方法是在數(shù)據(jù)塊中定義包絡(luò)表的值。

段的最后一個(gè)脈沖的周期在包絡(luò)中不直接指定,但必須計(jì)算出來(除非周期增量是0)。如果在段之間需要平滑轉(zhuǎn)換,知道段的最后一個(gè)脈沖的周期是有用的。計(jì)算段的最后一個(gè)脈沖周期的公式是:
段的最后一個(gè)脈沖的周期時(shí)間=ICT+(DEL*(Q--1))
其中:Init_CTseg =該段的初始化周期
Deltaseg=該段的增量周期時(shí)間
Quantityseg=該段的脈沖數(shù)量
注意:周期增量只能以微秒數(shù)或毫秒數(shù)指定,周期的修改在每個(gè)脈沖上進(jìn)行
2.3.2、按照下面的公式可以計(jì)算完成一個(gè)給定波形段的時(shí)間長短:
波形段的持續(xù)時(shí)間=Q*(ICT+((DEL/2)*(Q--1)))
其中:Quantityseg =該段的脈沖數(shù)量
ICT=該段的初始化周期時(shí)間
DEL=該段的增量周期時(shí)間
PTO的特點(diǎn):每段中的頻率變化值都是每個(gè)脈沖變化一次,曲線較均勻平滑。可以很好的擬合復(fù)雜的曲線。
開環(huán)運(yùn)動(dòng)控制部分:
1、S7-200提供有開環(huán)運(yùn)動(dòng)控制的三種方式:
脈寬調(diào)制(PWM) --內(nèi)置于S7-200,用于速度、位置或占空比控制。
脈沖串輸出(PTO) --內(nèi)置于S7-200,用于速度和位置控制。
EM253位控模塊--用于速度和位置控制的附加模塊。
S7-200提供了兩個(gè)數(shù)字輸出(Q0.0和Q0.1),該數(shù)字輸出可以通過位控向?qū)ЫM態(tài)為PWM或PTO的輸出。位控向?qū)н€可以用于組態(tài)EM253位控模塊。
當(dāng)組態(tài)一個(gè)輸出為PWM操作時(shí),輸出周期固定,脈寬或脈沖占空比通過您的程序進(jìn)行控制。脈沖寬度的變化在您程序中可以控制速度或位置。
當(dāng)組態(tài)一個(gè)輸出為PTO操作時(shí),生成一個(gè)50%占空比脈沖串用于步進(jìn)電機(jī)或伺服電機(jī)的速度和位置的開環(huán)控制。內(nèi)置PTO功能僅提供了脈沖串輸出。您的應(yīng)用程序必須通過PLC內(nèi)置I/O或擴(kuò)展模塊提供方向和限位控制。
EM253位控模塊提供了帶有方向控制、禁止和清除輸出的單脈沖輸出。另外,專用輸入允許將模塊組態(tài)為包括自動(dòng)參考點(diǎn)搜索在內(nèi)的幾種操作模式。模塊為步進(jìn)電機(jī)或伺服電機(jī)的速度和位置開環(huán)控制提供了統(tǒng)一的解決方案。
為了簡化您應(yīng)用程序中位控功能的使用,STEP 7--Micro/WIN提供的位控向?qū)Э梢栽趲追昼妰?nèi)全部完成PWM、PTO或位控模塊的組態(tài)。該向?qū)Э梢陨晌豢刂噶睿梢杂眠@些指令在應(yīng)用程序中對(duì)速度和位置進(jìn)行動(dòng)態(tài)控制。對(duì)于位控模塊,STEP 7--Micro/WIN還提供了一個(gè)控制面板,可以控制、監(jiān)視和測試您的運(yùn)動(dòng)操作。
1.1使用PWM (脈寬調(diào)制)輸出
PWM產(chǎn)生一個(gè)占空比變化周期固定的脈沖輸出。以指定頻率(周期)啟動(dòng)后,PWM持續(xù)輸出。脈沖寬度根據(jù)所需的控制要求進(jìn)行變化。占空比可以表示為周期的一個(gè)百分比或?qū)?yīng)于脈沖寬度的一個(gè)時(shí)間值。脈沖寬度可以從0% (無脈沖,一直為低電平)變化到100% (無脈沖,一直為高電平)。
由于PWM輸出可以從0%變化到100%,在很多情況下,它可以提供一個(gè)類似于模擬量輸出的數(shù)字量輸出。例如,PWM輸出可以用于電機(jī)從停止到最大速度的控制,或用于閥從關(guān)到全開的位置值控制。
1.2開環(huán)位控用于步進(jìn)電機(jī)或伺服電機(jī)的基本信息
內(nèi)置于S7-200 PLC的PTO和EM253位控模塊都使用一個(gè)脈沖串輸出用于步進(jìn)電機(jī)或伺服電機(jī)的速度和位置控制。使用PTO或模塊用于開環(huán)位置控制需要運(yùn)動(dòng)控制領(lǐng)域的專業(yè)技術(shù)。提供基礎(chǔ)信息以幫助您使用位控向?qū)槟膽?yīng)用程序組態(tài)PTO或模塊、
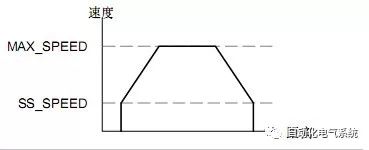
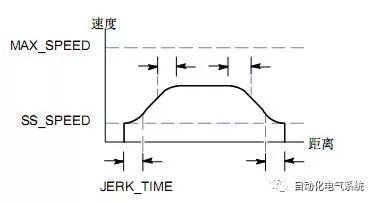
最大速度和啟動(dòng)/停止速度
向?qū)⑻崾灸鷳?yīng)用程序的最大速度(MAX_SPEED)和啟動(dòng)/停止速度(SS_SPEED)。如圖
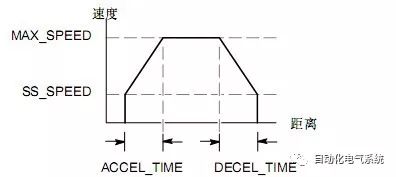
輸入加速和減速時(shí)間
1.3選擇包絡(luò)的操作模式
您要按照操作模式組態(tài)包絡(luò)。PTO支持相對(duì)位置和單一速度的連續(xù)轉(zhuǎn)動(dòng)。而位控模塊支持絕對(duì)位置、相對(duì)位置、單一速度連續(xù)轉(zhuǎn)動(dòng)和以兩種速度連續(xù)轉(zhuǎn)動(dòng)

1.4創(chuàng)建包絡(luò)中的步
一個(gè)步是工件運(yùn)動(dòng)的一個(gè)固定距離,包括加速和減速時(shí)間內(nèi)的距離。PTO每一包絡(luò)最大允許29個(gè)步,而模塊的每一包絡(luò)最大允許4個(gè)步。要為每一步指定目標(biāo)速度和結(jié)束位置或
脈沖數(shù)目,且每次輸入一步。圖所示為一步、兩步、三步和四步包絡(luò)。
注意一步包絡(luò)只有一個(gè)勻速段,兩步包絡(luò)有兩個(gè)勻速段,依次類推。步的數(shù)目與包絡(luò)中勻速段的數(shù)目一致
1.5組態(tài)PTO輸出
1.6通過位控向?qū)?chuàng)建指令
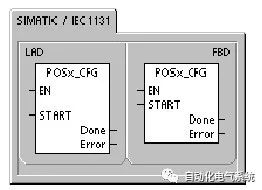
通過創(chuàng)建五個(gè)唯一的指令子程序,位控向?qū)沟每刂苾?nèi)置PTO更加容易。每個(gè)位控指令都包含前綴“PTOx_”,其中x表示通道編號(hào)(x=0時(shí)為Q0.0,x=1時(shí)為Q0.1
USS_CTRL子程序
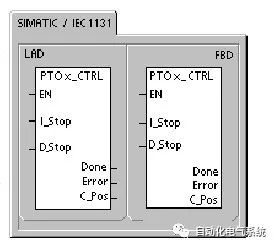
PTOx_CTRL子程序(控制)使能和初始化用于步進(jìn)電機(jī)或伺服電機(jī)的PTO輸出。在您的程序中僅能使用該子程序一次,并保證每個(gè)掃描周期該子程序都被執(zhí)行。一直使用SM0.0作為EN輸入的輸入。
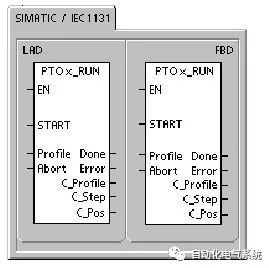
PTOx_RUN子程序
PTOx_RUN子程序(運(yùn)行包絡(luò))命令PLC在一個(gè)指定的包絡(luò)中執(zhí)行運(yùn)動(dòng)操作,此包絡(luò)存儲(chǔ)在組態(tài)/包絡(luò)表中
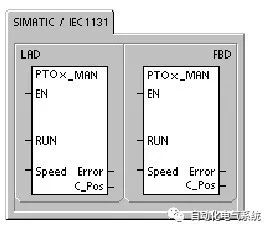
PTOx_MAN子程序
PTOx_MAN子程序(手動(dòng)模式)使PTO輸出置為手動(dòng)模式。這可以使電機(jī)在向?qū)е兄付ǖ姆秶?從啟動(dòng)/停止速度到最大速度)內(nèi)以不同速度啟動(dòng)、停止和運(yùn)行。如果啟用了PTOx_MAN子程序,則不應(yīng)執(zhí)行其它任何PTOx_RUN或PTOx_ADV指令。
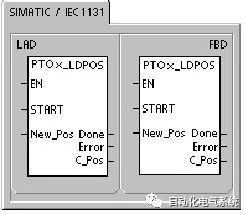
PTOx_LDPOS指令
PTOx_LDPOS指令(裝載位置)改變PTO脈沖計(jì)數(shù)器的當(dāng)前位置值為一個(gè)新值。您可以使用該指令為任何一個(gè)運(yùn)動(dòng)命令建立一個(gè)新的零位置。
PTOx_ADV子程序
PTOx_ADV子程序停止當(dāng)前的連續(xù)運(yùn)動(dòng)包絡(luò),并增加向?qū)Оj(luò)定義中指定的脈沖數(shù)。當(dāng)您在位控向?qū)е兄付酥辽僖粋€(gè)允許PTOx_ADV選項(xiàng)的單速連續(xù)轉(zhuǎn)動(dòng),則該子程序被創(chuàng)建。
OSx_GOTO指令
指令POSx_GOTO命令位控模塊走到指定位置

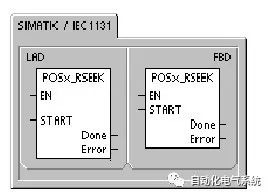
POSx_RSEEK指令
POSx_RSEEK指令(尋找參考點(diǎn)位置)觸發(fā)一個(gè)參考點(diǎn)尋找操作,使用組態(tài)/包絡(luò)表中的搜尋方式。當(dāng)位控模塊鎖定參考點(diǎn)并且運(yùn)動(dòng)停止后,位控模塊裝載參數(shù)RP_OFFSET的值作為當(dāng)前位置并在CLR輸出點(diǎn)產(chǎn)生一個(gè)50毫秒的脈沖
POSx_LDOFF指令
POSx_LDOFF指令(裝載參考點(diǎn)偏移量)建立一個(gè)新的零位置,它與參考點(diǎn)位置不在同一處。

OSx_SRATE指令
POSx_SRATE指令(設(shè)置速率)命令位控模塊改變加速、減速和陡變時(shí)間

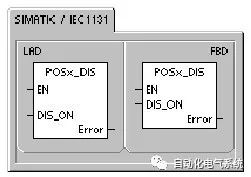
POSx_DIS指令
指令POSx_DIS可接通或斷開位控模塊的DIS輸出。您可以使用DIS輸出來允許或禁止電機(jī)控制器。如果您要使用位控模塊上的DIS輸出,那么,這條指令可以在每一循環(huán)周期中調(diào)用,或者只在您需要改變DIS輸出時(shí)調(diào)用。
POSx_CLR指令
POSx_CLR指令(觸發(fā)CLR輸出)命令位控模塊在CLR輸出上生成一個(gè)50ms的脈沖。

POSx_CFG指令
POSx_CFG指令(重新裝載組態(tài))命令位控模塊從組態(tài)/包絡(luò)表指針?biāo)付ǖ牡胤阶x取組態(tài)塊。位控模塊將新的組態(tài)與現(xiàn)有的組態(tài)進(jìn)行比較并執(zhí)行所有需要的設(shè)置改變或重新計(jì)算。
1.5位控模塊的特性
位控模塊可為您提供單軸、開環(huán)位置控制所需要的功能和性能。
提供高速控制,速度從每秒20個(gè)脈沖到每秒200,000個(gè)脈沖
支持急停(S曲線)或線性的加速、減速功能
提供可組態(tài)的測量系統(tǒng),既可以使用工程單位
(如英寸或厘米)也可以使用脈沖數(shù)
提供可組態(tài)的螺距誤差補(bǔ)償
支持絕對(duì)、相對(duì)和手動(dòng)的位控方式
提供連續(xù)操作
提供多達(dá)25組的移動(dòng)包絡(luò),每組最多可有4種速度
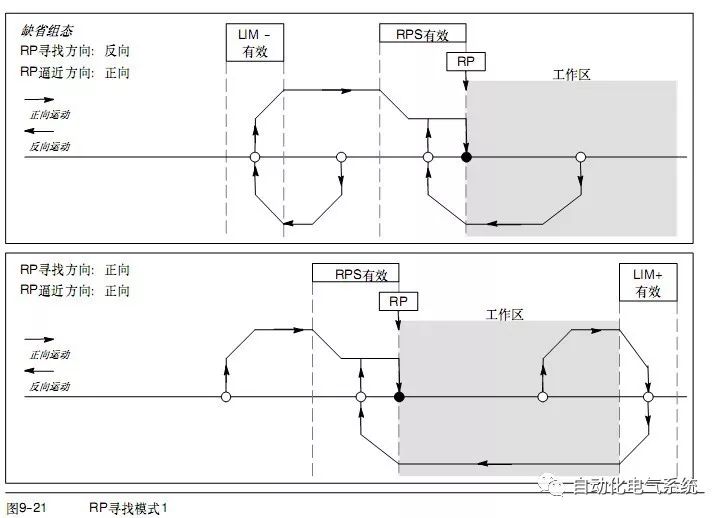
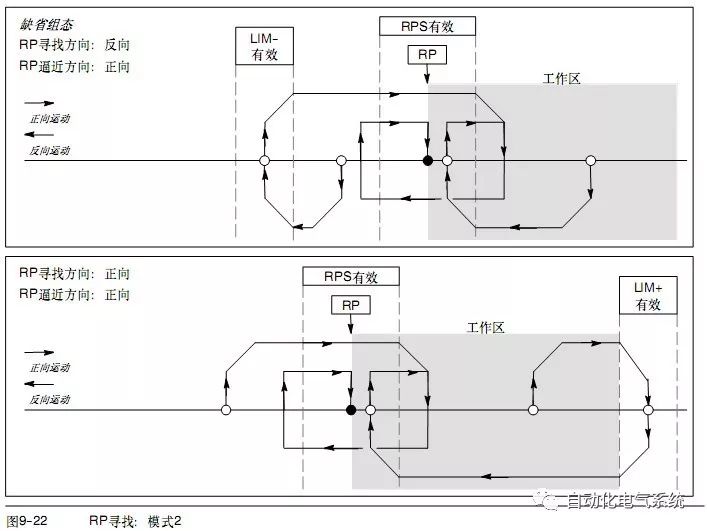
提供4種不同的參考點(diǎn)尋找模式,每種模式都可對(duì)起始的尋找方向和最終的接近方向進(jìn)行選擇
位控模塊提供5個(gè)數(shù)字輸入和4個(gè)數(shù)字輸出與您的運(yùn)動(dòng)控制應(yīng)用相連。這些輸入輸出位于位控模塊上。另外還提供了位控模塊與一些常用的電機(jī)驅(qū)動(dòng)/放大單元的接線圖。
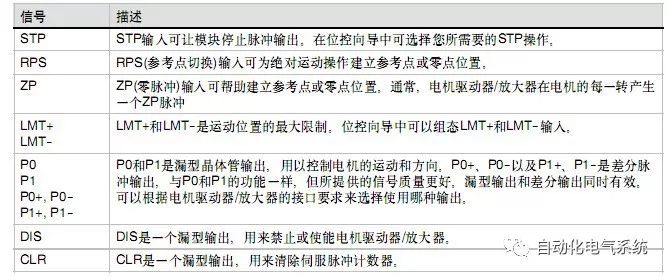
組態(tài)模塊對(duì)物理輸入的響應(yīng)
接下來,為LMT+、LMT--、和STP輸入選擇模塊響應(yīng)。使用下拉框選擇:無動(dòng)作(忽略輸入條件),減速至停止(缺省)或立即停止。
輸入最大啟動(dòng)和停止速度
為您的應(yīng)用輸入最大速度(MAX_SPEED)和啟動(dòng)/停止速度(SS_SPEED)。S7-200開環(huán)運(yùn)動(dòng)控制
輸入點(diǎn)動(dòng)參數(shù)
接下來,輸入JOG_SPEED和JOG_INCREMENT速度值。
JOG_SPEED:JOG_SPEED (電機(jī)的點(diǎn)動(dòng)速度)是JOG命令仍然有效時(shí)能夠?qū)崿F(xiàn)的最大速度。
JOG_INCREMENT:瞬時(shí)JOG命令移動(dòng)工具的距離。

輸入加速時(shí)間
在編輯框中輸入加速和減速時(shí)間。
輸入陡變時(shí)間
對(duì)于單步運(yùn)動(dòng),輸入陡變時(shí)間補(bǔ)償。通過減小運(yùn)動(dòng)包絡(luò)的加速和減速部分的陡變(變化速率)來提供更為平滑的位置控制。參見圖。陡變時(shí)間補(bǔ)償也被稱為“S曲線包絡(luò)”。這種補(bǔ)償同樣地作用于加速曲線和減速曲線的開始和結(jié)束部分。陡變補(bǔ)償不能夠應(yīng)用在介于零速和SS_SPEED速度之間的初始段和結(jié)束段中。
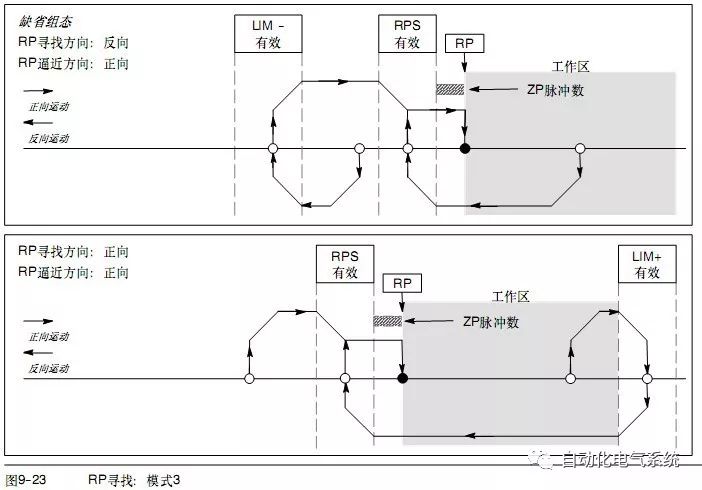
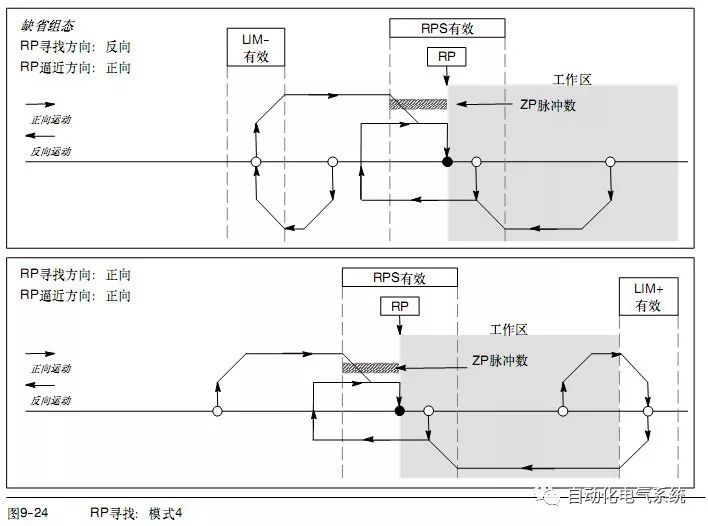
1.6位控模塊所支持的RP尋找模式
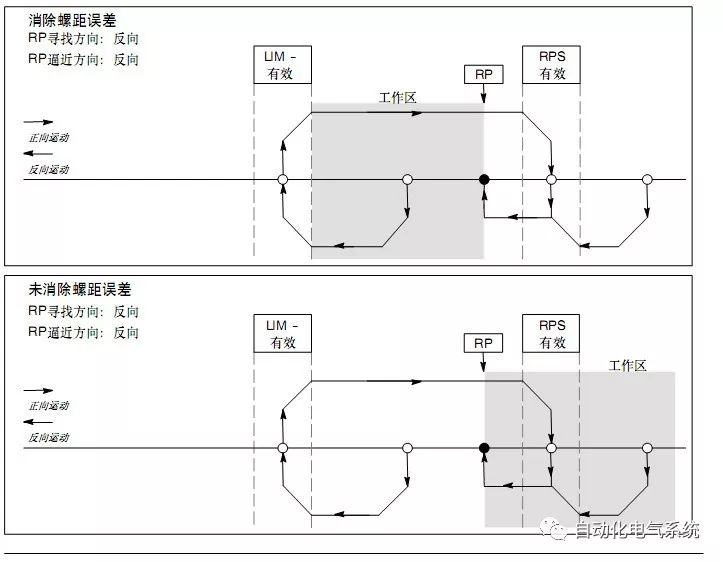
1.7選擇工作區(qū)位置消除螺距誤差
-
西門子
+關(guān)注
關(guān)注
94文章
3035瀏覽量
115795 -
PWM
+關(guān)注
關(guān)注
114文章
5186瀏覽量
213819 -
脈沖
+關(guān)注
關(guān)注
20文章
889瀏覽量
95620
原文標(biāo)題:史上最全的西門子脈沖方式匯總
文章出處:【微信號(hào):GKYXT1508,微信公眾號(hào):工控云學(xué)堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
暢銷西門子助聽器價(jià)格表_西門子助聽器價(jià)格大全

西門子變頻器如何選型_西門子變頻器選型注意哪些
西門子是哪個(gè)國家的品牌_西門子發(fā)明了什么
博世和西門子哪個(gè)好_博世和西門子的關(guān)系
西門子plc數(shù)據(jù)類型_西門子plc通訊方式
西門子300PLC的教案-計(jì)數(shù)、頻率測量和脈沖寬度調(diào)制
西門子PLC四種核心通訊方式匯總學(xué)習(xí)

西門子PLC通訊知識(shí)匯總

如何使用西門子1200的脈沖指令?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論