 機器人進入家庭的美好可能與受制因素
機器人進入家庭的美好可能與受制因素
個人服務機器人在近年來隨著人工智能的快速發展開始得到不少關注。個人服務機器人是否真正能夠作為消費級產品大規模進入家庭?其中的技術突破口又在什么地方?2018年5月,英特爾中國研究院發布《自適應機器人交互白皮書》,以養老服務機器人為切口,對其中的關鍵技術領域自適應機器人交互了進行了系統介紹。
7月11日雷克大會,英特爾中國研究院機器人交互實驗室研發總監任海兵在演講時,就白皮書中的內容進行了重點解讀。
機器人進入家庭的美好可能與受制因素
英特爾中國研究院機器人一直致力于自適應機器人交互技術和機器人計算平臺的研究,任海兵表示,機器人將在未來五到十年真正進入到家庭場景,解決大眾實際需要。
但想要進入家庭,必須滿足幾個關鍵因素:一、低成本;二、提供多種有用的服務;三、有良好易用的機器人交互,而且具備自主/自適應學習能力;四、具備安全性。
任海兵指出,機器人在家中具有眾多的應用場景,比如接待客人,目前Robocup服務機器人競賽中已經有讓機器人接待客人的比賽項目;比如幫我們拍照片、選視角;可以自主聊天、溝通;做我們的教練;陪孩子學習、一起下棋。此外,機器人還可以具有看護功能,對家中的老人達到日常的關懷,也可以起到監控作用。
對于目前的人工智能技術來說,想達到“進入家庭”的水平仍存挑戰,主要分為三大技術問題:
一是不確定性。任海兵稱,目前基于深度學習的算法,深度網絡即使達到一千多層還是可能出錯,更糟糕的是算法不知道什么時候出錯為什么出錯,這是不確定性的問題。
二是不認識/不知道。比如家庭里有新的東西、新的物品出現,算法該如何識別?因為目前的算法都是基于大數據來學習訓練模型參數,新物品只有很少量的數據,無法訓練穩定的模型參數。
三是缺知識。算法是數據驅動的,它缺乏知識中的常識知識以及與個人相關的知識。
改良之道——自適應機器人研究
英特爾中國研究院的想法, 是讓人工智能技術聯合智能交互的算法真正幫助人工智能,進行自主學習并改正它的問題,使其達到進入家庭的標準。
英特爾做的自適應機器人交互方面的研究有三個方面:自適應的特定人識別,知識圖譜和自適應的物體。并針對以上三個問題,英特爾中國研究院提出了一套解決方案。第一是針對不確定性,評估識別結果的置信度,通過觀察和智能交互來自主學習,更新模型從而不斷提高魯棒性;第二是不認識的問題,通過少量樣本的學習策略和后續的智能交互來解決;第三就是知識圖譜,利用知識圖譜的自動更新增加知識,增加個人知識圖譜,并結合符號方法和統計方法。
首先是自適應的特定人識別,英特爾中國研究院利用多模態融合、通過對人的持續觀察來自學習更新模型。我們不僅有人臉識別、基于人體特征的身份識別,還有人體屬性識別等。對于每個模態,都會估計其識別結果的置信度。依據置信度,不僅可以做基于樣本的個性化融合策略,而且可以自適應提高每個模態的正確率。我們都知道,錯誤識別的樣本對提高當前分類器是非常重要的,,我們利用多模態相互校驗算法可以在線收集這樣的高質量樣本,用這些樣本逐漸優化我們的模型,使它能夠達到一個越來越高的正確率。
第二部分是知識圖譜,包括常識和個人的知識圖,在交互過程中可以通過語音、視覺收集信息,這些信息不僅包含物體的時空信息,還有他們之間的相互關系。知識圖譜另外一個很重要的功能就是知識校驗,通過觀察和交互自動處理知識之間的沖突。
第三就是自適應的物體識別。目前,我們用的物體檢測和識別都是基于深度學習的方法,模型是通過大數據預先訓練得到。物體的類別和表觀都是事前確定的,這個類別數量還不是很多,例如著名的PASCAL VOC數據集只有20類物體。而用戶家庭有不屬于這20類的物體,或者屬于這20類,但是表觀與訓練數據集不一致的,都無法正確識別。自適應的物體識別就是要利用小數據學習物體模型參數,正確的檢測和識別這些物體。另外,我們還要估計物體的屬性(例如材質、顏色)、視角等信息,來估計識別結果的置信度,輔助智能交互。
這是英特爾中國研究院最近推出自適應機器人交互庫1.0版本,可以在網站上下載。任海兵表示后續可能會在年底推出2.0的版本,增加一些新功能,包括對人情感的識別等。
此外,自適應機器人交互能力在研的其他工作,還包括:
一、自適應意圖、情緒(Human Intention & Emotion)識別。英特爾中國研究院曾兩次獲得情緒識別競賽EmotiWChallenge的冠軍(ICMI2015,2017);通過自適應技術可以進一步提高個性化表情的識別率;通過意圖分析主動提供幫助進行和諧空間共享等。
二、環境計算(Ambient computing),包括多模態融合行為識別、結合環境感知技術(如智能家居中的低功耗傳感器)。
三、落地應用探索。比如智能家居中的智能老人看護(從能自理老人開始,逐漸過渡到半失能老人)、智能兒童教育、生活助手以及智能零售。
任海兵在雷克大會上展示了一個智能交互的demo。在demo里有一個非常聰明的機器人,有個性化的知識圖譜,可以主動提供幫助。比如說一個老人要出門了,機器人觀察到老人沒有攜帶帽子、圍巾等就會主動進行提醒,老人說幫我找一下,機器人就搜索環境尋找圍巾和帽子。,圍巾找到了,但是帽子沒有找到,被沙發墊遮擋了。機器人就從知識圖譜中搜索最近一次看到帽子的信息,提示老人帽子可能的位置。
HERO機器人的開放研究平臺
英特爾中國研究院一直在做計算平臺研究,目前推出一款名叫HERO的異構開放研究平臺,非常適合于服務機器人和入門級自動駕駛研究,包含CPU、FPGA,Movidius NCS等多種加速架構,還有一個保護內核和用戶的安全架構。下圖是它具體的參數。
最近英特爾推出OpenVINO軟件開發包,在軟硬件方面都做了統一的接口。軟件方面,不僅支持Caffe,Tensorflow,還支持Mxnet。硬件方面,在FPGA,CPU和Movidius NCS等異構平臺上做了統一接口,方便用戶采用不同的硬件平臺,簡化算法的修改。
HERO安全框架包括兩個部分,第一就是對于機器人自身的內核的保護,防止黑客攻擊,保護信息防止篡改;還可以感應外在的行人,防止機器人對人身體進行傷害。
最后,任海兵指出,自適應機器人交互是服務機器人需要突破的關鍵技術,英特爾中國研究院將通過HERO開放機器人平臺和自適應機器人交互助力下一代服務機器人的研發。
-
英特爾
+關注
關注
61文章
9950瀏覽量
171696 -
機器人
+關注
關注
211文章
28387瀏覽量
206921
原文標題:解讀《自適應機器人交互白皮書》:機器人交互需要突破性技術
文章出處:【微信號:robotplaces,微信公眾號:機器人創新生態】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】+初品的體驗
從市場角度對機器人的基本解讀

【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
1X公司發布首款消費級人形機器人
開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
Al大模型機器人
人工智能與機器人的區別
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
FMEA與機器人:如何確保機器人技術的可靠性與安全性
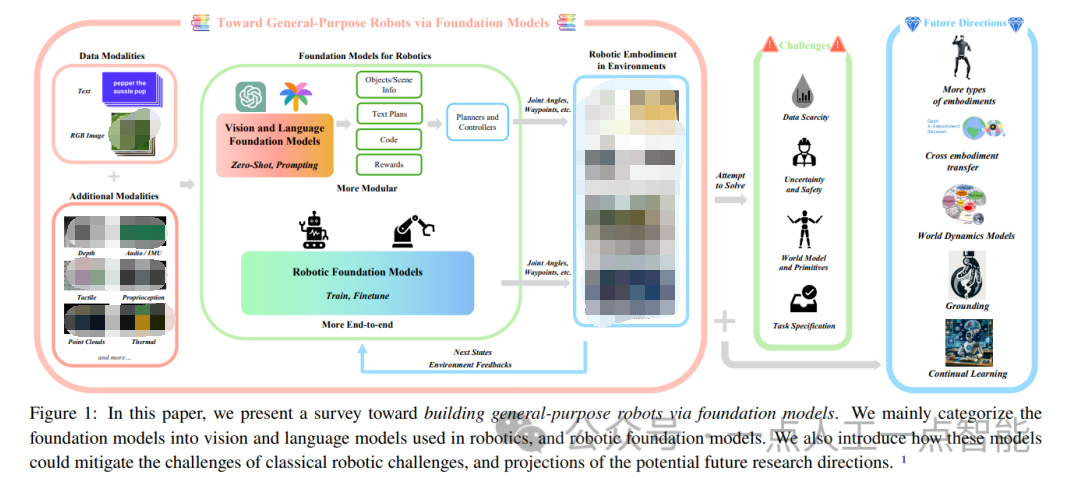
基礎模型能為機器人帶來怎樣的可能性?
解決人口難題的終極方案:家庭服務機器人
什么是協作機器人?為什么使用協作機器人?





 工商網監
工商網監
評論