 教你i.MX RT1052的開源AutoQuad飛控
教你i.MX RT1052的開源AutoQuad飛控
【背景描述】
AutoQuad是德國的一款老牌開源飛控(硬件閉源),其旨在提供穩定、動態飛行和自動駕駛功能的飛控控制器。
由于AutoQuad硬件閉源的特性,國內的玩家很少,但AutoQuad 的ukf算法“獨步天下”,絕對是一絕,我對其垂涎已久。15年時我自己做出了Autoquad的M4版本硬件(基于stm32f405rgt6),可以運行官方源碼。
17年時我將Autoquad移植到mdk環境下并且將其rtos替換為RT-Thread。后續玩這個玩了蠻久時間,這個版本的AutoQuad有一個問題:由于UKF算法占用了很多cpu資源使得整個系統cpu占用率太高,再者就是片內ram資源捉襟見肘。
對于這個版本的AutoQuad目前有挺多模友想繼續深入的開發,比如網名為“我的世界觀”的網友想將L1自適應控制算法加入到其中,但這個L1自適應算法也是極耗費cpu資源的。在這個背景下我開始著手AutoQuad在imx-rt1052上的實現,以期留出足夠的資源給大家來給模友們深入開發,同時我也借機熟悉下RT-Thread的3.x版本。
另外參加這個作品征集活動只是這個項目的開始,我后續會將成果放在github,歡迎大家一起來加入這個項目,繼續延續AutoQuad的傳奇。
【所用物料】
主控:
iMX-RT1052DVL6B
傳感器:
ICM20602、SPL06、HMC5983
編譯環境:
WIN10、MDK5.25
RT-Thread 版本:
3.0.4
實物圖:
硬件板子目前基于野火1052 mini開發板,傳感器是從馬家買的現成模塊,采用飛線的形式固定在開發板上(后期會重新設計一款小的適合飛控的板子)
主控+傳感器
全部的連接都使用飛線(感謝火哥不殺之恩)
為了上蓋能蓋的下,將底板上的usb座和網絡接口座去掉了(感謝火哥不殺之恩)
勉強能扣好
【硬件設計】
系統框圖
硬件設計解析
A、傳感器部分:
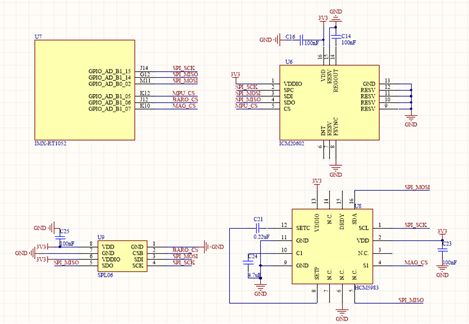
各個傳感器接到IMX-RT1052的SPI3上,進行分時操作。
B、SBUS輸入
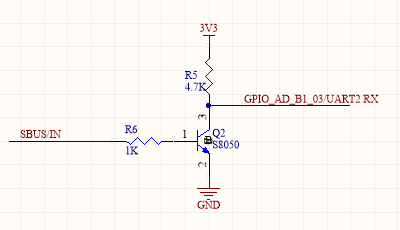
由于SBUS信號是一個反向電平的串口信號,這里使用一個三級管搭了一個簡單的反向電路,從而將信號正確到接入到處理器的串口輸入端。
C、PWM 信號輸出
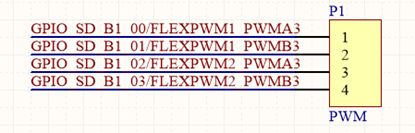
用于控制ESC的PWM信號,使用主控上PWM1和PWM2中的AB通道,這里3的意思是使用submode3。
D、GPS
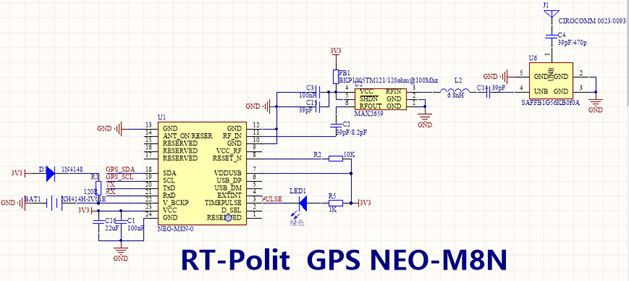
GPS模塊是一個獨立的單元,通過串口接到主控的串口5上,上圖中的原理圖是我早期時候設計的基于Ublox M8N的GPS模塊,這里剛好用到。
【軟件設計】
軟件設計流程
整個AutoQuad源碼是一個較大的系統,我這里抽絲剝繭,將其中的主脈絡流程貼出來:
關鍵代碼解析
此版和之前在stm32f405上的版本最大的區別在于加速度+陀螺儀傳感器、磁力計、高度計的數據讀取上。原版直接使用spi進行驅動,這個版本我使用了RT-Thread的SPI設備驅動框架來進行數據讀取。
這里將加速度傳感器&陀螺儀驅動源碼列出來,進行一個簡單解析:
1、將總線設備掛到總線上(配置CS引腳)
rt1050_spi_bus_attach_device("spi3", "spi32", 64);
此段代碼表示將icm20602作為spi3上的第三個設備和spi總線進行關聯,并使用 GPIO_AD_B1_05 作為其cs引腳(其中64代表 GPIO_AD_B1_05 ,即icm20602的cs引腳是 GPIO_AD_B1_05 )。
2、配置SPI總線相關參數
struct rt_spi_configuration cfg; cfg.data_width = 8; cfg.mode = RT_SPI_MODE_0 | RT_SPI_MSB; /* SPI Compatible: Mode 0 and Mode 3 */ cfg.max_hz = MPU6000_SPI_BAUD; /* 1M */ rt_spi_configure(spi_acc_gyro_device->rt_spi_device, &cfg);
3、對總線的互斥操作
為保證多個設備對spi3的互斥使用,需要對icm20602加入互斥鎖操作:
static void sensor_lock(struct spi_acc_gyro_device * sensor_device) { rt_mutex_take(sensor_device->lock, RT_WAITING_FOREVER); } static void sensor_unlock(struct spi_acc_gyro_device * sensor_device) { rt_mutex_release(sensor_device->lock); }
4、寄存器的讀寫操作
static void icm20602_write_reg(uint8_t reg, uint8_t value) { uint8_t send_buffer[2]; send_buffer[0] = reg&0x7f; send_buffer[1] = value; rt_spi_send(spi_acc_gyro_device->rt_spi_device, send_buffer, 2); } static uint8_t icm20602_read_reg(uint8_t reg) { uint8_t rxBuf[2]; uint8_t txBuf[2]; txBuf[0] = reg|0x80; rt_spi_send_then_recv(spi_acc_gyro_device->rt_spi_device, txBuf, 1, rxBuf, 2); return rxBuf[0]; } static uint8_t icm20602_read_buffer(uint8_t reg, uint8_t *buffer, uint16_t len) { uint8_t txBuf[2]; uint8_t rxBuf[20]; sensor_lock(spi_acc_gyro_device); txBuf[0] = reg|0x80; rt_spi_send_then_recv(spi_acc_gyro_device->rt_spi_device, txBuf, 1, rxBuf, len); rt_memcpy(buffer, rxBuf, len); sensor_unlock(spi_acc_gyro_device); return 0; }
5、讀取加速度和陀螺儀數據
static uint8_t icm20602_get_accel(int16_t *accel, int16_t *temp) { uint8_t buf[10]; icm20602_read_buffer(ICM20_ACCEL_XOUT_H,buf,8); accel[0] = ((int16_t)buf[0]<<8) + buf[1]; ? ?accel[1] = ((int16_t)buf[2]<<8) + buf[3]; ? ?accel[2] = ((int16_t)buf[4]<<8) + buf[5]; ? ?*temp ? ? = ((int16_t)buf[6]<<8) + buf[7]; ? ?//ICM_TRACE("acc0=%d, acc1=%d, acc2=%d ",accel[0],accel[1],accel[2]); ? ?return 0; } static uint8_t icm20602_get_gyro(int16_t *gyro) { ? ?uint8_t buf[8]; ? ?icm20602_read_buffer(ICM20_GYRO_XOUT_H,buf,8); ? ?gyro[0] = (buf[0]<<8) + buf[1]; ? ?gyro[1] = (buf[2]<<8) + buf[3]; ? ?gyro[2] = (buf[4]<<8) + buf[5]; ? ?// ICM_TRACE("gyro0=%d, gyro1=%d, gyro2=%d ",gyro[0],gyro[1],gyro[2]); ? ?return 0; }
因為 icm20602_read_buffer 函數內部已經加入了互斥,所以讀取時不再需要互斥操作。
RT-Thread 使用情況
1、動態內存管理;
2、GPIO設備驅動架構;
3、RTC設備驅動架構;
4、SPI設備驅動架構;
5、SDIO設備驅動架構;
6、串口設備驅動架構;
7、MSH命令行;
8、FatFs文件系統。
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753078 -
開發板
+關注
關注
25文章
5032瀏覽量
97375 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166391
原文標題:一文教你i.MX RT1052的開源AutoQuad飛控——周四RTOS專欄
文章出處:【微信號:elecfans,微信公眾號:電子發燒友網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
飛凌嵌入式推出i.MX RT1052跨界開發板
恩智浦i.MX RTxxx系列MCU的特性
如何使用Pendrive通過USB更新i.MX RT1052 EVK上的外部閃存固件?
I.MX RT1052代碼執行在哪里?
i.MX RT1052的FLex通過FLI_ SPI(4-wire) 接口訪問FPGA時,如何取消中間的閑置部分?
i.MX RT1052芯片的核心板,性能和代碼詳細資料概述
野火電子基于RT-Thread的i.MX RT1052 EVK Pro板卡特點介紹
i.MX RT1052對視頻應用的支持
i.MX RT開發筆記-08 | i.MX RT1062嵌套中斷向量控制器NVIC(按鍵中斷檢測)






 工商網監
工商網監
評論