 無人機ESC高速無傳感器FOC參考設計
無人機ESC高速無傳感器FOC參考設計
ESC模塊是非軍用無人機中非常重要的子系統;如果用戶需要更高效的機型來實現更長的飛行時間、更好的動態行為和更加平順、穩定的性能,那么非常適合使用此類模塊。TI的設計采用了通常用于無人飛行器(UAV)或無人機的電子調速器(ESC)。
速度控制通過無傳感器的方式完成,并使用FOC速度控制技術對電機進行了電氣頻率高達1.2kHz(對于6極對電機而言為12kRPM)的測試。
無人機 ESC高速無傳感器FOC參考設計擁有一流的FOC算法實施,可實現更長的飛行時間、更佳的動態性能,且具有更高的集成度,因此電路板尺寸更小,BOM組件更少。
無傳感器高速FOC控制技術使用TI的FATM軟件觀測器,利用了InstaSPIN-MotionTM C2000TM LaunchPadTM和DRV8305 BoosterPackTM。
特性
InstaSPIN-FOC?無傳感器FOC可實現更高的動態性能。經測試高達12,000 RPM(使用3節鋰聚合物電池);
高動態性能:在不到0.2s時間內達到1 kRPM到10 kRPM(電氣頻率100Hz至1kHz)轉速,可實現高性能偏轉和俯仰動作;
適于完成翻轉動作的快速翻轉能力;
由于塊交換上更高的FOC效率,可實現更長的飛行時間;
更高的PWM開關頻率(經測試高達60kHz),可針對低電感高速電機降低電流/扭矩紋波,并且可以避免超聲波傳感器;
由于InstaSPIN-FOC的自動電機參數識別,縮短了上市時間:自動調優無傳感器FOC解決方案;
針對繞組電阻變化進行電機溫度估算,以保護電機在臨時過載情況下免受損壞。
應用領域
無人機和UAV
高速電機
電池供電的電動工具
1.系統說明
就無人機而言,完整無人機飛行系統包含的不同子系統通常涉及到以下模塊定義。
無人機飛行系統模塊
(1)無人機的ESC功能要求
ESC定義了無人機的動態運動性能和飛行時間。無人機必須能夠完成的一些運動模式包括:
精確運動模式:航行、懸停
快速運動模式:沿x/y/z方向360°旋轉、水平最高速度飛行、垂直最高速度飛行
為了提供這些功能,需要使用優秀的ESC來控制所用電機在所有速度下產生的升力。這樣一來,基于位置傳感器模塊的穩定算法可以補償影響無人機的振動和外力。
能夠改變的電機速度越快,穩定算法需要執行的速度變化就越少;因此,使用的能量少于無人機以高度變化的速度運行的情況下(使用動態性較差的ESC時便屬于這種情況)所需的能量。
(2)正弦控制型ESC模塊
以1到5度的最小精度測量轉子的磁場角度,從而使用FOC算法確保最大扭矩,或根據電機的相電壓和相電流估算轉子磁角(無傳感器算法)。
下圖顯示三個相位的典型PWM高側和低側圖形,并顯示了以正弦控制方式運行電機時消除PWM載波后的相應理想濾波相電壓。
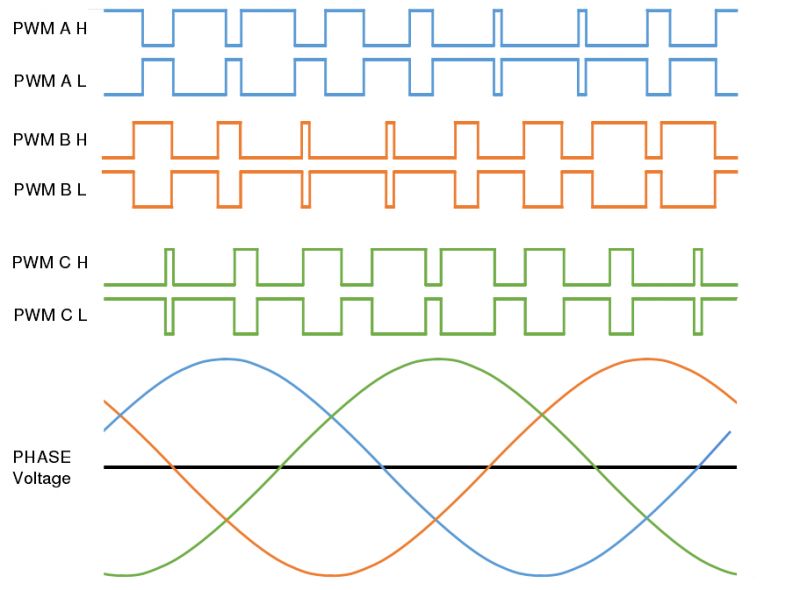
生成理想的PWM正弦相電壓
在開環控制中,同步電機(BLDC或BLAC)由控制信號進行盲目驅動,并假定該電機會跟隨指定的控制動作。
為確保電機正確運行,需要在繞組上施加比理想電流更大的電流來強制該運動。最終,這是開環控制電機與閉環控制電機相比系統效率降低的主要原因。
在閉環控制中,電機控制系統能夠測試電機是否按照預期運行。如果不能按預期運行,控制環路會自動通過減少或增加電流進行補償。
無論是使用閉環控制還是使用無傳感器算法,都必須測量電流和電壓信號,以便將這些信號用作反饋信號。
對于正弦控制,應測量最多三個分流電流。進行電壓測量時,應選擇僅測量DC link電壓還是同時測量三相電壓和DC link電壓。
(3)電子調速器(ESC)
無人機的發動機運行速度必須按照無人機的重量和螺旋槳的尺寸確定,以便產生無人機飛行所需的升力。為無人機設計的典型三相無刷電機具有以下常見特性:
低電感
低電阻
兩到八個極對
1000Hz或更高的電氣頻率
該電機采用優化設計,可由包含兩節至六節電池(即7.4V至22.2V直流電壓)的鏗聚合物電池供電。這些電壓用于設計所選電機的最大速度。
此處的一個常見問題是以最大速度運行接近Veus的電機,因為此處的FOC算法和無傳感器算法都必須足夠出色才能支持此運行方式。
本報告中使用的ESC適用于使用無傳感器算法的三相無刷電機。該ESC模塊的組件如下圖所示。
無人機ESC的框圖
2.系統規格
本系統需要一個具有感能力的三相半橋功率級,以便生成無傳感器算法所需的反饋信號。
此功率級必須由包含兩節至六節電池(即Veus為7.4V至22.2V)的鏗聚合物電池供電。
由于電機和依賴于頻率的傳感器具有較低的時間常數,因此PWM頻率較高;典型的電流設計使用大約45kHz至60kHz的PWM頻率,并有進一步增加的趨勢。其次需要一種與飛行控制器通信的方式,可使用占空比或串行通信方式完成。

3.原理方框圖
系統方框圖
4.核心器件
(1)TM S320F2806xF
F2806xF PiccoloTM系列微控制器(MCU)將C28x內核和控制律加速器(CLA)的性能與高度集成的控制外設整合到低引腳數的器件中。
一個內部穩壓器實現了單電源軌運行。高分辨率脈寬調制器(HRPWM)模塊經過強化以實現雙邊沿控制(頻率調制)。該器件內還新增了采用10位內部基準的模擬比較器,可通過與其直接相連來控制ePWM輸出。
ADC可在OV至3.3V的固定滿量程范圍內實施轉換,并支持比例式 VREFHI/VREFLO基準。ADC接口已針對低開銷和延遲進行了優化。
該器件在專用于執行的ROM中包含專用的電機控制軟件以實現InstaSPIN-FOC 解決方案,并通過MotorWare提供系統軟件支持。
(2)DRV8305
DRV8305是一款適用于三相電機驅動應用的柵極驅動器IC而設計。該器件提供三個高精度修整和溫度補償的半橋驅動器,每個驅動器能夠驅動一個高側和低側增強模式N溝MOSFET。
DRV8305具有三個基于電流器的電流檢測放大器,可實現對電流的精確測量,支持100%占空比,并且具有多級保護。通過串行外設接口(SPI)可以對該柵極驅動器進行編程。
(3)LMR16006
該PWM直流/直流降壓穩壓器具有4V至60V的寬輸入電壓范圍,適用于從工業到汽車的廣泛應用中非穩壓電源的電源調節。該穩壓器在ECO模式下的待機電流為28μA,非常適合電池供電類系統。
(4)CSD18540Q5B
這款款 60V 1.8mΩ SON 5mm×6mm NexFET? 功率MOSFET可用于最大限度地降低電源轉換應用中的損耗。
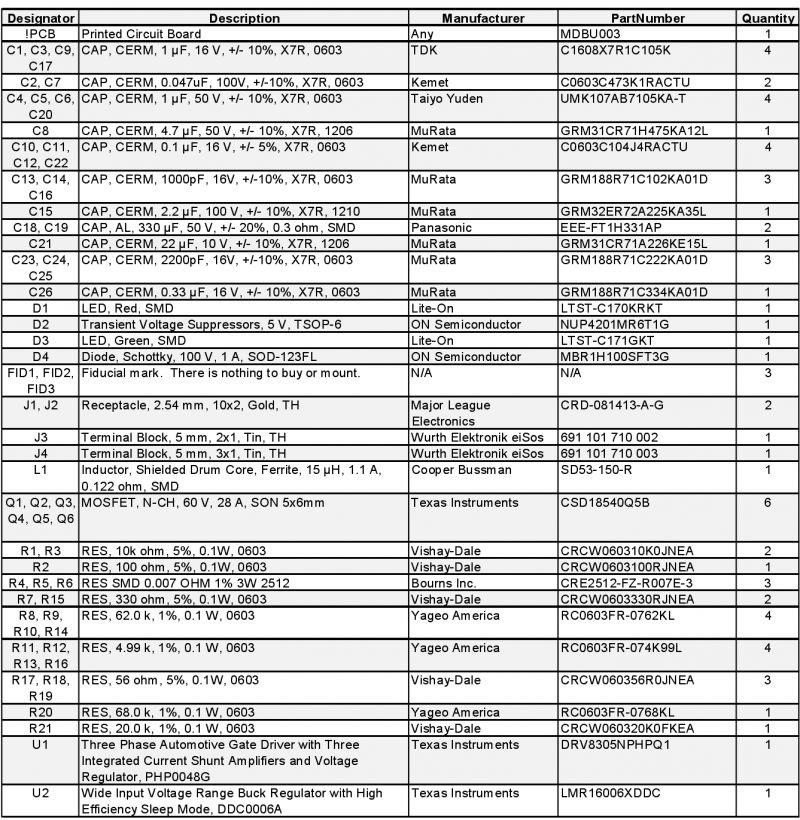
BOM物料清單
5.PCB
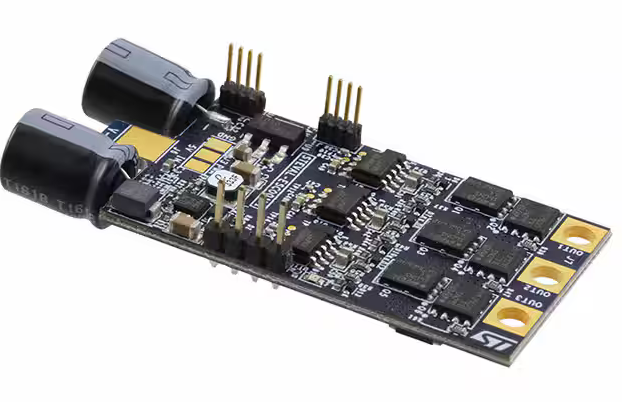
下圖分別顯示了LaunchPad和BoosterPack PCB的頂部和底部圖片。
完整系統電路板圖片(頂視圖)
LaunchPad電路板圖片(頂視圖)
華強芯城商城有售核心部件DRV8305,LMR16006,CSD18540Q5B,庫存豐富,歡迎垂詢。
-
傳感器
+關注
關注
2551文章
51163瀏覽量
754123 -
無人機
+關注
關注
230文章
10454瀏覽量
180715 -
FOC
+關注
關注
20文章
322瀏覽量
42852
原文標題:想讓你的無人機飛得更穩更久?看這文就夠了
文章出處:【微信號:elecfans,微信公眾號:電子發燒友網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
霍爾傳感器在無人機中的應用


無人機干擾器對網絡的影響
開源項目!用ESP8266 DIY會爬墻的無人機
知語科技反無人機技術手段有哪些?
#參考設計#實現無傳感器FOC算法的無人機電子速度控制器的完整方案






 工商網監
工商網監
評論