") 無位置傳感器控制方法,你掌握了嗎?
無位置傳感器控制方法,你掌握了嗎?
01
磁鏈觀測(cè)法電機(jī)磁鏈信號(hào)和轉(zhuǎn)子位置直接相關(guān), 因此可以通過轉(zhuǎn)子磁鏈的值來確定轉(zhuǎn)子位置信號(hào)。
但電機(jī)轉(zhuǎn)子磁鏈不能直接檢測(cè)得到。為了獲得電機(jī)轉(zhuǎn)子磁鏈值,必須先測(cè)量電機(jī)的相電壓和電流, 建立不依賴于轉(zhuǎn)子速度而與轉(zhuǎn)子磁鏈直接相關(guān)的函數(shù)方程,計(jì)算磁鏈值。
這種方法計(jì)算量大,而相電壓和電流中含有大量的干擾信號(hào),準(zhǔn)確測(cè)量又需要很高的軟硬件成本,因此很少采用。
02
反電勢(shì)過零檢測(cè)法在無刷直流電機(jī)中,繞組的反電勢(shì)通常是正負(fù)交變的,當(dāng)某相繞組的反電勢(shì)過零時(shí),轉(zhuǎn)子直軸恰好與該相繞組軸線重合,因此只要檢測(cè)到各相反電勢(shì)的過零點(diǎn),就可獲知轉(zhuǎn)子的若干個(gè)關(guān)鍵位置,從而省去轉(zhuǎn)子位置傳感器,實(shí)現(xiàn)無位置傳感器無刷直流電機(jī)控制。這是目前應(yīng)用最廣泛的無位置傳感器 BLDCM 控制方法。
這種方法的缺點(diǎn)是靜止或低速時(shí)反電勢(shì)信號(hào)為零或很小,難以準(zhǔn)確檢測(cè)繞組的反電勢(shì),因而無法得到有效的轉(zhuǎn)子位置信號(hào),系統(tǒng)低速性能比較差,需要采用開環(huán)方法進(jìn)行起動(dòng);另外,為消除PWM調(diào)制引起的干擾信號(hào),需要對(duì)反電勢(shì)信號(hào)進(jìn)行深度濾波,這樣造成與電機(jī)轉(zhuǎn)速有關(guān)的信號(hào)相移,為了保證正確的換相需要對(duì)此相移進(jìn)行補(bǔ)償。
03
反電勢(shì)三次諧波積分法由于BLDCM的反電動(dòng)勢(shì)為典型的梯形波,它包含了基波及其高次諧波分量,通過對(duì)電樞三相相電壓的簡(jiǎn)單疊加,就可以獲得3次諧波及其奇數(shù)倍諧波,可以從中提取反電動(dòng)勢(shì)的3次諧波分量,并進(jìn)行積分,積分值為零時(shí)即得功率器件的開關(guān)信號(hào)。
反電動(dòng)勢(shì)3次諧波信號(hào)的獲取有兩種方式:一種利用電機(jī)中性點(diǎn)和并聯(lián)于電機(jī)三相繞組端的星形電阻的中性點(diǎn)來得到反電動(dòng)勢(shì)的3次諧波分量;在沒有中性點(diǎn)引出的電機(jī),可以利用直流側(cè)中點(diǎn)電壓和星形電阻網(wǎng)絡(luò)的中性點(diǎn)來獲得反電動(dòng)勢(shì)的3次諧波分量;然后對(duì)獲得的信號(hào)進(jìn)行濾波,濾掉3次諧波的高次分量,由于高次分量的最低為9倍的基波頻率,對(duì)濾波器要求低。
因而它比反電動(dòng)勢(shì)直接過零比較有更寬的運(yùn)行范圍。這種方法避免了逆變器開關(guān)造成的干擾,但是3次諧波的幅值小于反電勢(shì)的幅值,不易檢測(cè),特別是低速的情況下,3次諧波信號(hào)更弱,難以獲得轉(zhuǎn)子位置信號(hào)。
04
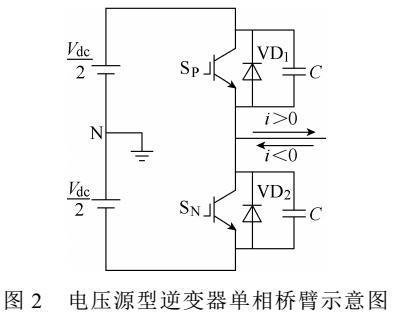
續(xù)流二極管法這種方法是通過監(jiān)視并聯(lián)在逆變器功率管兩端的自由換向二級(jí)管的導(dǎo)通情況來確定電機(jī)功率管的換向時(shí)刻。BLDCM 三相繞組中總有一相處于斷開狀態(tài), 于是通過監(jiān)視6個(gè)續(xù)流二級(jí)管的導(dǎo)通關(guān)斷情況就可以獲得6個(gè)功率管的開關(guān)順序。
該方法可以提高電機(jī)的調(diào)速范圍,特別是可以拓寬電機(jī)的調(diào)速下限。但是這種方法要求逆變器必須工作在上下功率管輪流處于PWM斬波方式,增大了控制難度;另外,對(duì)于續(xù)流二極管導(dǎo)通的無效信號(hào)和毛刺干擾造成的誤導(dǎo)通信號(hào)的去除也不易實(shí)現(xiàn)。
這種方法也存在著較大的檢測(cè)誤差,反電勢(shì)系數(shù)、繞組電感量不是常數(shù)、反電勢(shì)波形不是標(biāo)準(zhǔn)的梯形波等都會(huì)造成轉(zhuǎn)子位置誤差。由于這種方法需要在二極管上并聯(lián)檢測(cè)電路,這對(duì)于集成的功率器件(如IPM)很難實(shí)現(xiàn)。
正因?yàn)橐陨戏N種缺點(diǎn),所以這種方法在國(guó)內(nèi)應(yīng)用并不是很廣泛,相對(duì)來說技術(shù)也不是很成熟。
05
電感法電感法有兩種形式:一種是用于凸極式永磁無刷直流電機(jī),另一種是用于內(nèi)嵌式磁鋼結(jié)構(gòu)的永磁無刷直流電機(jī)。第一種電感法主要是通過在起動(dòng)過程中對(duì)電機(jī)繞組施加探測(cè)電壓來判斷其電感的變化。
在凸極電機(jī)中,繞組自感可表示成繞組軸線與轉(zhuǎn)子直軸間夾角的偶次余弦函數(shù),通過檢測(cè)繞組自感的變化,就可判斷出轉(zhuǎn)子軸線的大致位置,再根據(jù)鐵心飽和程度的變化趨勢(shì)確定其極性,從而最終得到正確位置信號(hào)。
這種方法難度較大,且只能應(yīng)用于凸極電機(jī),所以現(xiàn)在較少應(yīng)用。與第一種方法相比,第二種方法才是真正意義上的電感法。
在內(nèi)嵌式永磁無刷直流電機(jī)中,繞組電感會(huì)因?yàn)檗D(zhuǎn)子位置的改變而發(fā)生相應(yīng)變化,通過檢測(cè)這些變化,再經(jīng)過一定計(jì)算,即可得到轉(zhuǎn)子位置信號(hào)。該方法中,需要對(duì)繞組電感進(jìn)行不間斷的實(shí)時(shí)檢測(cè),增加了實(shí)現(xiàn)的難度,應(yīng)用不是很廣泛。
06
狀態(tài)觀測(cè)器法“狀態(tài)觀測(cè)器法”的基本思想就是以電機(jī)的轉(zhuǎn)速、轉(zhuǎn)子位置角、電流等參數(shù)為狀態(tài)變量,在定義狀態(tài)變量的基礎(chǔ)上對(duì)電機(jī)建立數(shù)學(xué)模型,通過數(shù)字濾波的方法得出狀態(tài)變量的離散值,從而實(shí)現(xiàn)對(duì)電機(jī)的控制。
“狀態(tài)觀測(cè)器法”比較好的解決了電機(jī)在高速、重載情況下難于控制的問題,其良好的抗干擾能力使其更適用于惡劣的工作環(huán)境。“狀態(tài)觀測(cè)器法”龐大的運(yùn)算量在一定程度上限制了它的應(yīng)用。這種方法一般采用數(shù)字信號(hào)處理器(DSP)來承擔(dān)龐大的運(yùn)算量,因而增加了系統(tǒng)成本,在實(shí)際應(yīng)用中并不多見。
-
二極管
+關(guān)注
關(guān)注
147文章
9631瀏覽量
166339 -
電感
+關(guān)注
關(guān)注
54文章
6136瀏覽量
102306 -
電機(jī)轉(zhuǎn)速
+關(guān)注
關(guān)注
0文章
63瀏覽量
11369
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
無位置傳感器的電機(jī)控制方式
無位置傳感器的電機(jī)控制資料分享
無位置傳感器無刷直流電機(jī)控制策略綜述
無刷直流電動(dòng)機(jī)的無位置傳感器控制
無位置傳感器無刷直流電機(jī)的控制策略
無傳感器BLDCM位置檢測(cè)的一種單片機(jī)軟件實(shí)現(xiàn)方法
無位置傳感器無刷直流電動(dòng)機(jī)控制方法及其DSP實(shí)現(xiàn)
艦船電機(jī)無位置傳感器控制
面裝式永磁同步電機(jī)驅(qū)動(dòng)系統(tǒng)無位置傳感器控制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論