 科學家研發可修復體內組織的軟體蜘蛛機器人
科學家研發可修復體內組織的軟體蜘蛛機器人
近日,據外媒報道,哈佛大學的研究人員已經借助一種全新的制造技術創造出了一種高度靈活機動的微型軟體蜘蛛機器人。
據悉,該蜘蛛機器人沒有剛性部件,從微流體系統中獲得其運動,外觀和能力。在它的主體內部是一個薄的中空管系統,通過該系統泵送特種液體,以驅動其四肢,改變其顏色或設置更多的永久性特征。相比其他同類產品,此款蜘蛛機器人更加小巧、靈活。
此外,除了彈性硅膠外,機器人本身由無彈性硅膠制成,由12層薄層組成,使用激光蝕刻出來然后粘合在一起,為機器人提供3D結構。為了達到其最終形狀,這些微流體通道中的一些通過可固化樹脂加壓。當用來自外部的UV光照射時,樹脂硬化并使較軟的層永久地彎曲成所需的形狀。
助理教授兼創造者之一的Tommaso Ranzani表示,我們相信軟體機器人在減少風險、進行微創手術任務方面有著巨大的潛力。或許在將來的某一天,這些軟體機器人可以在身體內部執行精細的醫療任務,或者在難以進入的地區進行搜索和救援任務。
目前,哈佛大學的研究人員還在不斷測試和完善該蜘蛛機器人,而隨著技術的不斷進步,相信真正的蜘蛛機器人將很快到來。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
212文章
28910瀏覽量
209654 -
軟體機器人
+關注
關注
1文章
113瀏覽量
11832
原文標題:哈佛科學家研發蜘蛛機器人 可進入體內修復組織
文章出處:【微信號:robot-1hjqr,微信公眾號:1號機器人網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
深圳人形機器人行走視頻震驚英偉達科學家,下一個劃時代產品是AI機器人?
電子發燒友網報道(文/吳子鵬)日前,深圳特區報發布了一則國產人形機器人行走的視頻,該視頻引起了包括英偉達高級AI研究科學家Jim Fan在內的業內人士和網友的廣泛關注。由于這款機器人步態非常接近
清華大學:軟體機器人柔性傳感技術最新研究進展
隨著機器人技術的發展,配備柔性傳感功能的軟體機器人在醫療輔助康復、水下資源勘探、陸地災難救援等領域發揮著重要作用,如何設計高性能柔性傳感器,實現軟體

高壓放大器在水下撲翼軟體機器人研究中的應用
實驗名稱:水下撲翼軟體機器人的實驗平臺搭建 實驗目的: 良好的運動性能是水下軟體機器人的基本功能要求。而實驗是檢驗設計是否合理、實驗樣機是否達到功能要求的重要手段。為了驗證設計的可行性


知行機器人獲誠美資本與中關村智友聯合領投
近日,知行機器人宣布成功完成新一輪融資,本輪融資由誠美資本與中關村智友科學家基金聯合領投。此次融資的成功,標志著知行機器人在資本市場上的強勁發展勢頭,也為其未來的發展注入了新的動力。 知行機器
英偉達預測機器人領域或迎“GPT-3時刻”
英偉達,作為全球圖形處理器與人工智能領域的佼佼者,正引領著科技界對機器人未來的無限遐想。近日,英偉達高級科學家Jim Fan在科技媒體The Decoder的博文中,以及紅杉資本的采訪中,大膽預測
Jim Fan展望:機器人領域即將迎來GPT-3式突破
英偉達科學家9月19日,科技媒體The Decoder發布了一則引人關注的報道,英偉達高級科學家Jim Fan在近期預測,機器人技術將在未來兩到三年內迎來類似GPT-3在語言處理領域的革命性突破,他稱之為
高壓放大器在介電彈性體折紙術軟體機器人中的應用
更多使命,但剛性機器人的高度發展無法滿足所有應用需求,脆弱的結構與笨重的體型使得它們的應用受到環境的限制。近年來軟體機器人的不斷發展使得這一劣勢足以彌補,為了滿足

清華大學:軟體機器人柔性傳感技術最新研究進展
清華大學深圳國際研究生院曲鈞天助理教授的海洋軟體機器人與智能傳感實驗室(Ocean Soft-Robot and Intelligent Sensing Lab,OASIS-LAB)在軟體機器

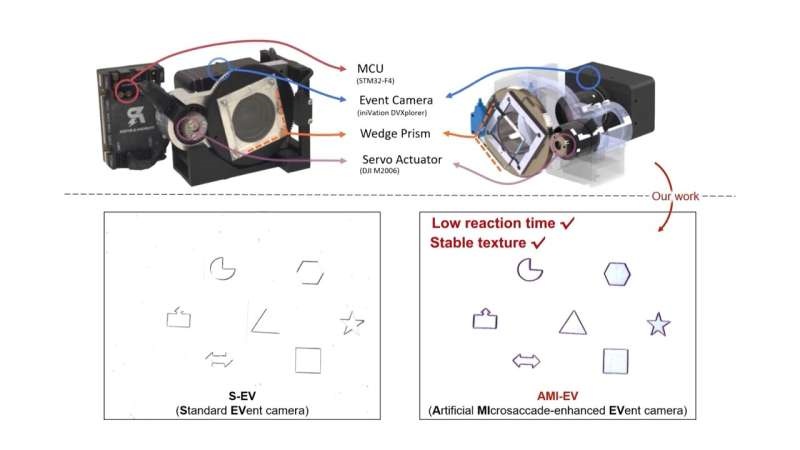
受人眼啟發!科學家開發出新型改良相機
新型事件相機系統與標準事件相機系統對比圖。 馬里蘭大學計算機科學家領導的一個研究小組發明了一種照相機裝置,可以改善機器人觀察周圍世界并做出反應的方式。受人眼工作原理的啟發,他們的創新型照相機系統模仿
天津大學科學家突破人類大腦器官成功驅動機器人
在科技探索的征途上,天津大學的科研團隊再次邁出了令人矚目的步伐。7月5日,該校宣布了一項革命性的成果——科學家們利用前沿的干細胞技術,成功培育出了高度模擬人類大腦的類腦器官,并創新性地將其與機器人系統通過先進的片上腦機接口技術緊密相連,開啟了人腦與
Al大模型機器人
和迭代來不斷改進自身性能。它們可以從用戶交互中學習并根據反饋進行調整,以提高對話質量和準確性。可定制性與整合性: AI大模型機器人可以根據特定需求進行定制和整合,以滿足不同場景和應用的要求。它們可以與其
發表于 07-05 08:52
新華社:突破性成果!祝賀我國科學家成功研發這一傳感器!
6月25日,新華社以《突破性成果!祝賀我國科學家》為標題,報道了由我國科學家研發的傳感器成果。 我國科學家研發高通道神經探針實現獼猴全腦尺度

本源量子參與的國家重點研發計劃青年科學家項目啟動會順利召開
2024年4月23日,國家重點研發計劃“先進計算與新興軟件”重點專項“面向復雜物理系統求解的量子科學計算算法、軟件、應用與驗證”青年科學家項目啟動會暨實施方案論證會在合肥順利召開。該項目由合肥綜合性國家

Aigtek:介電彈性體高壓放大器在軟體機器人研究中的應用
近年來軟體機器人的研究成為目前機器人研究領域的熱點,由于軟體材料的自由度可以根據需求自由變化,因此軟體機






 工商網監
工商網監
評論