") 步進(jìn)電機(jī)具有精確控制的優(yōu)點(diǎn),但功耗大,效率低,力矩小。
步進(jìn)電機(jī)具有精確控制的優(yōu)點(diǎn),但功耗大,效率低,力矩小。
直流電機(jī)(direct current machine)是指能將直流電能轉(zhuǎn)換成機(jī)械能(直流電動機(jī))或?qū)C(jī)械能轉(zhuǎn)換成直流電能(直流發(fā)電機(jī))的旋轉(zhuǎn)電機(jī)。它是能實(shí)現(xiàn)直流電能和機(jī)械能互相轉(zhuǎn)換的電機(jī)。當(dāng)它作電動機(jī)運(yùn)行時(shí)是直流電動機(jī),將電能轉(zhuǎn)換為機(jī)械能;作發(fā)電機(jī)運(yùn)行時(shí)是直流發(fā)電機(jī),將機(jī)械能轉(zhuǎn)換為電能。
直流電機(jī)由定子和轉(zhuǎn)子兩部分組成,其間有一定的氣隙。其構(gòu)造的主要特點(diǎn)是具有一個帶換向器的電樞。直流電機(jī)的定子由機(jī)座、主磁極、換向磁極、前后端蓋和刷架等部件組成。其中主磁極是產(chǎn)生直流電機(jī)氣隙磁場的主要部件,由永磁體或帶有直流勵磁繞組的疊片鐵心構(gòu)成。直流電機(jī)的轉(zhuǎn)子則由電樞、換向器(又稱整流子)和轉(zhuǎn)軸等部件構(gòu)成。其中電樞由電樞鐵心和電樞繞組兩部分組成。電樞鐵心由硅鋼片疊成,在其外圓處均勻分布著齒槽,電樞繞組則嵌置于這些槽中。換向器是一種機(jī)械整流部件。由換向片疊成圓筒形后,以金屬夾件或塑料成型為一個整體。各換向片間互相絕緣。換向器質(zhì)量對運(yùn)行可靠性有很大影響。
直流電機(jī)的基本構(gòu)成與直流電機(jī)驅(qū)動電路的設(shè)計(jì)圖解
直流電機(jī)的基本構(gòu)成
直流電機(jī)由定子和轉(zhuǎn)子兩部分組成,其間有一定的氣隙。
直流電機(jī)的定子由機(jī)座、主磁極、換向磁極、前后端蓋和刷架等部件組成。其中主磁極是產(chǎn)生直流電機(jī)氣隙磁場的主要部件,由永磁體或帶有直流勵磁繞組的疊片鐵心構(gòu)成。
直流電機(jī)的轉(zhuǎn)子則由電樞、換向器(又稱整流子)和轉(zhuǎn)軸等部件構(gòu)成。其中電樞由電樞鐵心和電樞繞組兩部分組成。電樞鐵心由硅鋼片疊成,在其外圓處均勻分布著齒槽,電樞繞組則嵌置于這些槽中。
換向器是一種機(jī)械整流部件。由換向片疊成圓筒形后,以金屬夾件或塑料成型為一個整體。各換向片間互相絕緣。換向器質(zhì)量對運(yùn)行可靠性有很大影響。
直流電機(jī)的基本構(gòu)成與直流電機(jī)驅(qū)動電路的設(shè)計(jì)圖解
直流電機(jī)的組成結(jié)構(gòu)
直流電機(jī)的結(jié)構(gòu)應(yīng)由定子和轉(zhuǎn)子兩大部分組成。直流電機(jī)運(yùn)行時(shí)靜止不動的部分稱為定子,定子的主要作用是產(chǎn)生磁場,由機(jī)座、主磁極、換向極、端蓋、軸承和電刷裝置等組成。運(yùn)行時(shí)轉(zhuǎn)動的部分稱為轉(zhuǎn)子,其主要作用是產(chǎn)生電磁轉(zhuǎn)矩和感應(yīng)電動勢,是直流電機(jī)進(jìn)行能量轉(zhuǎn)換的樞紐,所以通常又稱為電樞,由轉(zhuǎn)軸、電樞鐵心、電樞繞組、換向器和風(fēng)扇等組成。
定子
(1)主磁極
主磁極的作用是產(chǎn)生氣隙磁場。主磁極由主磁極鐵心和勵磁繞組兩部分組成鐵心一般用0.5mm~1.5mm厚的硅鋼板沖片疊壓鉚緊而成,分為極身和極靴兩部分,上面套勵磁繞組的部分稱為極身,下面擴(kuò)寬的部分稱為極靴,極靴寬于極身,既可以調(diào)整氣隙中磁場的分布,又便于固定勵磁繞組。勵磁繞組用絕緣銅線繞制而成,套在主磁極鐵心上。整個主磁極用螺釘固定在機(jī)座上,
(2)換向極
換向極的作用是改善換向,減小電機(jī)運(yùn)行時(shí)電刷與換向器之間可能產(chǎn)生的換向火花,一般裝在兩個相鄰主磁極之間,由換向極鐵心和換向極繞組組成。換向極繞組用絕緣導(dǎo)線繞制而成,套在換向極鐵心上,換向極的數(shù)目與主磁極相等。
(3)機(jī)座
電機(jī)定子的外殼稱為機(jī)座。機(jī)座的作用有兩個:
一是用來固定主磁極、換向極和端蓋,并起整個電機(jī)的支撐和固定作用;
二是機(jī)座本身也是磁路的一部分,借以構(gòu)成磁極之間磁的通路,磁通通過的部分稱為磁軛。為保證機(jī)座具有足夠的機(jī)械強(qiáng)度和良好的導(dǎo)磁性能,一般為鑄鋼件或由鋼板焊接而成。
(4)電刷裝置
電刷裝置是用來引入或引出直流電壓和直流電流的。電刷裝置由電刷、刷握、刷桿和刷桿座等組成。電刷放在刷握內(nèi),用彈簧壓緊,使電刷與換向器之間有良好的滑動接觸,刷握固定在刷桿上,刷桿裝在圓環(huán)形的刷桿座上,相互之間必須絕緣。刷桿座裝在端蓋或軸承內(nèi)蓋上,圓周位置可以調(diào)整,調(diào)好以后加以固定。
轉(zhuǎn)子
(1)電樞鐵心
電樞鐵心是主磁路的主要部分,同時(shí)用以嵌放電樞繞組。一般電樞鐵心采用由0.5mm厚的硅鋼片沖制而成的沖片疊壓而成,以降低電機(jī)運(yùn)行時(shí)電樞鐵心中產(chǎn)生的渦流損耗和磁滯損耗。疊成的鐵心固定在轉(zhuǎn)軸或轉(zhuǎn)子支架上。鐵心的外圓開有電樞槽,槽內(nèi)嵌放電樞繞組。
(2)電樞繞組
電樞繞組的作用是產(chǎn)生電磁轉(zhuǎn)矩和感應(yīng)電動勢,是直流電機(jī)進(jìn)行能量變換的關(guān)鍵部件,所以叫電樞。它是由許多線圈(以下稱元件)按一定規(guī)律連接而成,線圈采用高強(qiáng)度漆包線或玻璃絲包扁銅線繞成,不同線圈的線圈邊分上下兩層嵌放在電樞槽中,線圈與鐵心之間以及上、下兩層線圈邊之間都必須妥善絕緣。為防止離心力將線圈邊甩出槽外,槽口用槽楔固定。線圈伸出槽外的端接部分用熱固性無緯玻璃帶進(jìn)行綁扎。
(3)換向器
在直流電動機(jī)中,換向器配以電刷,能將外加直流電源轉(zhuǎn)換為電樞線圈中的交變電流,使電磁轉(zhuǎn)矩的方向恒定不變;在直流發(fā)電機(jī)中,換向器配以電刷,能將電樞線圈中感應(yīng)產(chǎn)生的交變電動勢轉(zhuǎn)換為正、負(fù)電刷上引出的直流電動勢。換向器是由許多換向片組成的圓柱體,換向片之間用云母片絕緣。
(4)轉(zhuǎn)軸
轉(zhuǎn)軸起轉(zhuǎn)子旋轉(zhuǎn)的支撐作用,需有一定的機(jī)械強(qiáng)度和剛度,一般用圓鋼加工而成。
一、 直流電機(jī)驅(qū)動電路的設(shè)計(jì)目標(biāo)
在直流電機(jī)驅(qū)動電路的設(shè)計(jì)中,主要考慮一下幾點(diǎn):
1. 功能:電機(jī)是單向還是雙向轉(zhuǎn)動?需不需要調(diào)速?對于單向的電機(jī)驅(qū)動,只要用一個大功率三極管或場效應(yīng)管或繼電器直接帶動電機(jī)即可,當(dāng)電機(jī)需要雙向轉(zhuǎn)動時(shí),可以使用由4個功率元件組成的H橋電路或者使用一個雙刀雙擲的繼電器。如果不需要調(diào)速,只要使用繼電器即可;但如果需要調(diào)速,可以使用三極管,場效應(yīng)管等開關(guān)元件實(shí)現(xiàn)PWM(脈沖寬度調(diào)制)調(diào)速。
2. 性能:對于PWM調(diào)速的電機(jī)驅(qū)動電路,主要有以下性能指標(biāo)。
1)輸出電流和電壓范圍,它決定著電路能驅(qū)動多大功率的電機(jī)。
2)效率,高的效率不僅意味著節(jié)省電源,也會減少驅(qū)動電路的發(fā)熱。要提高電路的效率,可以從保證功率器件的開關(guān)工作狀態(tài)和防止共態(tài)導(dǎo)通(H橋或推挽電路可能出現(xiàn)的一個問題,即兩個功率器件同時(shí)導(dǎo)通使電源短路)入手。
3)對控制輸入端的影響。功率電路對其輸入端應(yīng)有良好的信號隔離,防止有高電壓大電流進(jìn)入主控電路,這可以用高的輸入阻抗或者光電耦合器實(shí)現(xiàn)隔離。
4)對電源的影響。共態(tài)導(dǎo)通可以引起電源電壓的瞬間下降造成高頻電源污染;大的電流可能導(dǎo)致地線電位浮動。
5)可靠性。電機(jī)驅(qū)動電路應(yīng)該盡可能做到,無論加上何種控制信號,何種無源負(fù)載,電路都是安全的。
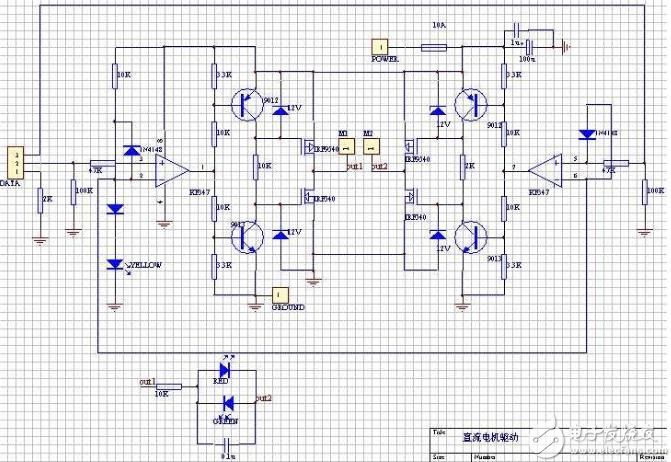
1.輸入與電平轉(zhuǎn)換部分:
輸入信號線由DATA引入,1腳是地線,其余是信號線。注意1腳對地連接了一個2K歐的電阻。當(dāng)驅(qū)動板與單片機(jī)分別供電時(shí),這個電阻可以提供信號電流回流的通路。當(dāng)驅(qū)動板與單片機(jī)共用一組電源時(shí),這個電阻可以防止大電流沿著連線流入單片機(jī)主板的地線造成干擾。或者說,相當(dāng)于把驅(qū)動板的地線與單片機(jī)的地線隔開,實(shí)現(xiàn)“一點(diǎn)接地”。
高速運(yùn)放KF347(也可以用TL084)的作用是比較器,把輸入邏輯信號同來自指示燈和一個二極管的2.7V基準(zhǔn)電壓比較,轉(zhuǎn)換成接近功率電源電壓幅度的方波信號。KF347的輸入電壓范圍不能接近負(fù)電源電壓,否則會出錯。因此在運(yùn)放輸入端增加了防止電壓范圍溢出的二極管。輸入端的兩個電阻一個用來限流,一個用來在輸入懸空時(shí)把輸入端拉到低電平。
不能用LM339或其他任何開路輸出的比較器代替運(yùn)放,因?yàn)殚_路輸出的高電平狀態(tài)輸出阻抗在1千歐以上,壓降較大,后面一級的三極管將無法截止。
2.柵極驅(qū)動部分:
后面三極管和電阻,穩(wěn)壓管組成的電路進(jìn)一步放大信號,驅(qū)動場效應(yīng)管的柵極并利用場效應(yīng)管本身的柵極電容(大約1000pF)進(jìn)行延時(shí),防止H橋上下兩臂的場效應(yīng)管同時(shí)導(dǎo)通(“共態(tài)導(dǎo)通”)造成電源短路。
當(dāng)運(yùn)放輸出端為低電平(約為1V至2V,不能完全達(dá)到零)時(shí),下面的三極管截止,場效應(yīng)管導(dǎo)通。上面的三極管導(dǎo)通,場效應(yīng)管截止,輸出為高電平。當(dāng)運(yùn)放輸出端為高電平(約為VCC-(1V至2V),不能完全達(dá)到VCC)時(shí),下面的三極管導(dǎo)通,場效應(yīng)管截止。上面的三極管截止,場效應(yīng)管導(dǎo)通,輸出為低電平。
上面的分析是靜態(tài)的,下面討論開關(guān)轉(zhuǎn)換的動態(tài)過程:三極管導(dǎo)通電阻遠(yuǎn)小于2千歐,因此三極管由截止轉(zhuǎn)換到導(dǎo)通時(shí)場效應(yīng)管柵極電容上的電荷可以迅速釋放,場效應(yīng)管迅速截止。但是三極管由導(dǎo)通轉(zhuǎn)換到截止時(shí)場效應(yīng)管柵極通過2千歐電阻充電卻需要一定的時(shí)間。相應(yīng)的,場效應(yīng)管由導(dǎo)通轉(zhuǎn)換到截止的速度要比由截止轉(zhuǎn)換到導(dǎo)通的速度快。假如兩個三極管的開關(guān)動作是同時(shí)發(fā)生的,這個電路可以讓上下兩臂的場效應(yīng)管先斷后通,消除共態(tài)導(dǎo)通現(xiàn)象。
實(shí)際上,運(yùn)放輸出電壓變化需要一定的時(shí)間,這段時(shí)間內(nèi)運(yùn)放輸出電壓處于正負(fù)電源電壓之間的中間值。這時(shí)兩個三極管同時(shí)導(dǎo)通,場效應(yīng)管就同時(shí)截止了。所以實(shí)際的電路比這種理想情況還要安全一些。
場效應(yīng)管柵極的12V穩(wěn)壓二極管用于防止場效應(yīng)管柵極過壓擊穿。一般的場效應(yīng)管柵極的耐壓是18V或20V,直接加上24V電壓將會擊穿,因此這個穩(wěn)壓二極管不能用普通的二極管代替,但是可以用2千歐的電阻代替,同樣能得到12V的分壓。
3.場效應(yīng)管輸出部分:
大功率場效應(yīng)管內(nèi)部在源極和漏極之間反向并聯(lián)有二極管,接成H橋使用時(shí),相當(dāng)于輸出端已經(jīng)并聯(lián)了消除電壓尖峰用的四個二極管,因此這里就沒有外接二極管。輸出端并聯(lián)一個小電容(out1和out2之間)對降低電機(jī)產(chǎn)生的尖峰電壓有一定的好處,但是在使用PWM時(shí)有產(chǎn)生尖峰電流的副作用,因此容量不宜過大。在使用小功率電機(jī)時(shí)這個電容可以略去。如果加這個電容的話,一定要用高耐壓的,普通的瓷片電容可能會出現(xiàn)擊穿短路的故障。
輸出端并聯(lián)的由電阻和發(fā)光二極管,電容組成的電路指示電機(jī)的轉(zhuǎn)動方向.
4.性能指標(biāo):
電源電壓15~30 V,最大持續(xù)輸出電流5A/每個電機(jī),短時(shí)間(10秒)可以達(dá)到10A,PWM頻率最高可以用到30KHz(一般用1到10KHz)。電路板包含4個邏輯上獨(dú)立的,輸出端兩兩接成H橋的功率放大單元,可以直接用單片機(jī)控制。實(shí)現(xiàn)電機(jī)的雙向轉(zhuǎn)動和調(diào)速。
5.布線:
大電流線路要盡量的短粗,并且盡量避免經(jīng)過過孔,一定要經(jīng)過過孔的話要把過孔做大一些(>1mm)并且在焊盤上做一圈小的過孔,在焊接時(shí)用焊錫填滿,否則可能會燒斷。另外,如果使用了穩(wěn)壓管,場效應(yīng)管源極對電源和地的導(dǎo)線要盡可能的短粗,否則在大電流時(shí),這段導(dǎo)線上的壓降可能會經(jīng)過正偏的穩(wěn)壓管和導(dǎo)通的三極管將其燒毀。在一開始的設(shè)計(jì)中,NMOS管的源極于地之間曾經(jīng)接入一個0.15歐的電阻用來檢測電流,這個電阻就成了不斷燒毀板子的罪魁禍?zhǔn)住.?dāng)然如果把穩(wěn)壓管換成電阻就不存在這個問題了。
三、 低壓驅(qū)動電路的簡易柵極驅(qū)動
一般功率場效應(yīng)管的最高柵源電壓為20V左右,所以在24V應(yīng)用中要保證柵源電壓不能超過20V,增加了電路的復(fù)雜程度。但在12V或更低電壓的應(yīng)用中,電路就可以大大簡化。
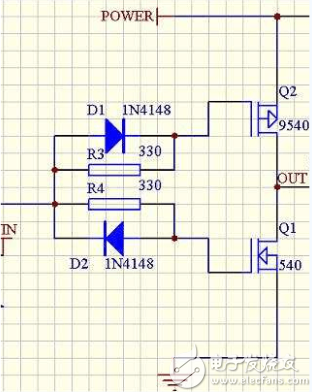
上圖就是一個12V驅(qū)動橋的一邊,上面電路的三極管部分被兩個二極管和兩個電阻代替。(注意,跟上圖邏輯是反的)由于場效應(yīng)管柵極電容的存在,通過R3,R4向柵極電容充電使場效應(yīng)管延緩導(dǎo)通;而通過二極管直接將柵極電容放電使場效應(yīng)管立即截止,從而避免了共態(tài)導(dǎo)通。
這個電路要求在IN端輸入的是邊緣陡峭的方波脈沖,因此控制信號從單片機(jī)或者其他開路輸出的設(shè)備接入后,要經(jīng)過施密特觸發(fā)器(比如555)或者推挽輸出的高速比較器才能接到IN端。如果輸入邊緣過緩,二極管延時(shí)電路也就失去了作用。
R3,R4的選取與IN信號邊沿升降速度有關(guān),信號邊緣越陡峭,R3,R4可以選的越小,開關(guān)速度也就可以做的越快。Robocon比賽使用的升壓電路(原理相似)中,IN前用的是555。
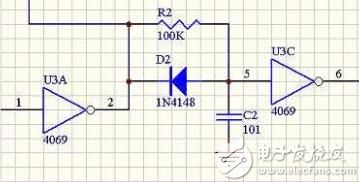
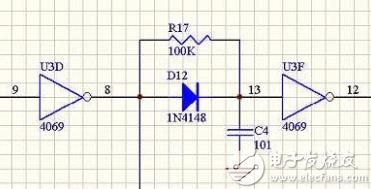
四、邊沿延時(shí)驅(qū)動電路
在前級邏輯電路里,有意地對控制PMOS的下降沿和控制NMOS的上升沿進(jìn)行延時(shí),再整形成方波,也可以避免場效應(yīng)管的共態(tài)導(dǎo)通。另外,這樣做可以使后級的柵極驅(qū)動電路簡化,可以是低阻推挽驅(qū)動?xùn)艠O,不必考慮柵極電容,可以較好的適應(yīng)不同的場效應(yīng)管。下圖是兩種邊沿的延時(shí)電路:
下圖是對應(yīng)的NMOS,PMOS柵極驅(qū)動電路:
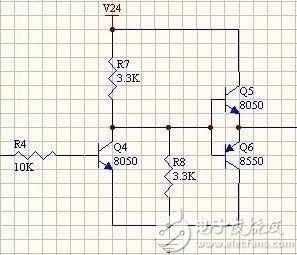
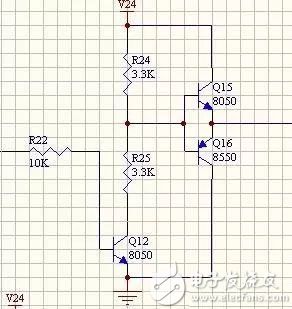
這個柵極驅(qū)動電路由兩級三極管組成:前級提供驅(qū)動場效應(yīng)管柵極所需的正確電壓,后級是一級射極跟隨器,降低輸出阻抗,消除柵極電容的影響。為了保證不共態(tài)導(dǎo)通,輸入的邊沿要比較陡,上述先延時(shí)再整形的電路就可以做到。
五、 其它幾種驅(qū)動電路
1. 繼電器+半導(dǎo)體功率器件的想法
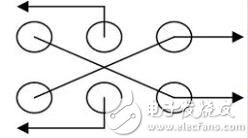
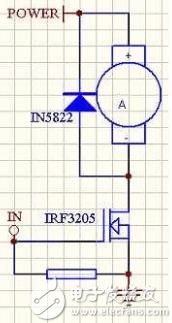
繼電器有著電流大,工作穩(wěn)定的優(yōu)點(diǎn),可以大大簡化驅(qū)動電路的設(shè)計(jì)。在需要實(shí)現(xiàn)調(diào)速的電機(jī)驅(qū)動電路中,也可以充分利用繼電器。有一個方案就是利用繼電器來控制電流方向來改變電機(jī)轉(zhuǎn)向,而用單個的特大電流場效應(yīng)管(比如IRF3205,一般只有N型特大電流的管子)來實(shí)現(xiàn)PWM調(diào)速,如下右圖所示。這樣是實(shí)現(xiàn)特別大電流驅(qū)動的一個方法。換向的繼電器要使用雙刀雙擲型的,接線如下左圖,線圈接線如下中圖:
2.幾種驅(qū)動芯片
1) L298
2) A3952
3) A3940
4) L6203
六、PWM調(diào)速的實(shí)現(xiàn)
//butcher補(bǔ)充一下吧
//算法原理
//編程實(shí)現(xiàn)要點(diǎn)
//優(yōu)缺點(diǎn)
2.使用循環(huán)移位的算法
產(chǎn)生PWM信號可以由定時(shí)器來完成,但是由于51內(nèi)部只提供了兩個定時(shí)器,因此如果要向三個或更多的直流電機(jī)輸出不同占空比的信號要反復(fù)設(shè)置定時(shí)器,實(shí)現(xiàn)較為復(fù)雜,我們采用一種比較簡單的方法不僅可以實(shí)現(xiàn)對更多的直流電機(jī)提供不同的占空比輸入信號,而且只占用一個定時(shí)器資源。這種方法可以簡單表述如下:
在內(nèi)存的某段空間內(nèi)存放各個直流電機(jī)所需的輸入信號占空比信息,如果占空比為1則保存0FFH(11111111B);占空比為0.5則保存0F0H(11110000B)或任何2進(jìn)制數(shù)中包括4個0和4個1。即占空比=1的個數(shù)/8
具體選取什么樣的二進(jìn)制數(shù)要看輸出頻率的要求。若要對此直流電機(jī)輸出PWM信號,只要每個時(shí)間片移位一次取出其中固定的一位(可以用位尋址或進(jìn)位標(biāo)志C實(shí)現(xiàn))送到電機(jī)端口上即可。另外,移位算法是一種對以前結(jié)果依賴的算法,所以最好定期檢查或重置被移位的數(shù),防止移錯導(dǎo)致一直錯下去。
這種算法的優(yōu)點(diǎn)是獨(dú)立進(jìn)程,可以實(shí)現(xiàn)對多個電機(jī)的控制,缺點(diǎn)是占用資源較大,PWM頻率較低。
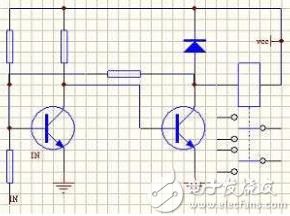
3.模擬電路PWM的實(shí)現(xiàn)
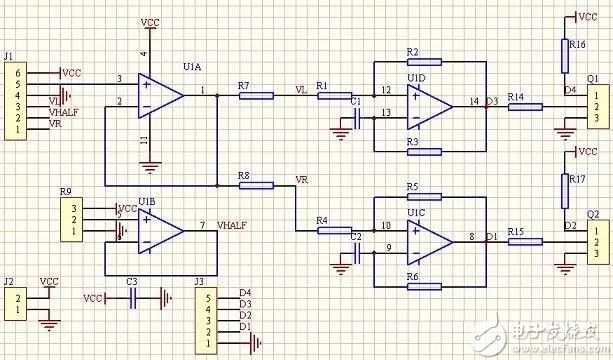
上圖為一個使用游戲手柄或者航模搖桿上的線性電位器(或線性霍爾元件)控制兩個底盤驅(qū)動電機(jī)的PWM生成電路。J1是手柄的插座,123和456分別是x,y兩個方向的電位器。U1B提供半電源電壓,U1A是電壓跟隨。x,y分量經(jīng)過合成成為控制左右輪兩個電機(jī)轉(zhuǎn)速的電壓信號。在使用中,讓L=(x+1)y/(x+1.4),R=(x-1)y/(x-0.6),經(jīng)過試驗(yàn)有不錯的效果(數(shù)字只是單位,不是電壓值)。經(jīng)過U1C和U1D組成的施密特振蕩器把電壓轉(zhuǎn)換為相應(yīng)的PWM信號,用來控制功率驅(qū)動電路。以U1D為例,R1,R2組成有回差的施密特電路,上下門限受輸入電壓影響,C1和R3組成延時(shí)回路,如此形成振蕩的脈寬受輸入電壓控制。Q1,Q2是三極管,組成反相器,提供差分的控制信號。具體振蕩過程參見數(shù)字電路教材上對555振蕩器的分析。
七、步進(jìn)電機(jī)驅(qū)動
1.小功率4相步進(jìn)電機(jī)的驅(qū)動
下面是一種驅(qū)動電路框圖:
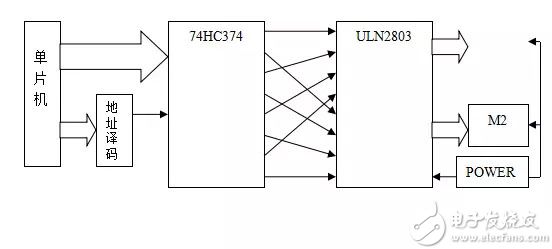
達(dá)林頓管陣列ULN2803分別從鎖存器取出第0,2,4,6位和1,3,5,7位去驅(qū)動兩個步進(jìn)電機(jī).四相步進(jìn)電機(jī)的通電順序可以有幾種:A,B,C,D(4相4拍);AB,BC,CD,DA(4相雙4拍);A,AB,B,BC,C,CD,D,DA(4相8拍).為了兼顧穩(wěn)定性,轉(zhuǎn)矩和功耗,一般采用4相8拍方式.所有這些方式都可以通過循環(huán)移位實(shí)現(xiàn)(也要有定期監(jiān)控),為了使4相8拍容易實(shí)現(xiàn),鎖存器與驅(qū)動部分采用了交叉連接.
步進(jìn)電機(jī)工作在四相八拍模式(即正轉(zhuǎn)的輸入信號為1000→1100→0100→0110→0010→0011→0001→1001→1000),對應(yīng)每個步進(jìn)電機(jī)要有四個信號輸入端,理論上向端口輸出信號可以控制兩個步進(jìn)電機(jī)的工作。寄存器循環(huán)移位奇偶位分別作兩個步進(jìn)電機(jī)的驅(qū)動端的做法,其思想如下:
LOOP: MOV A,#1110000B ;在A寄存器中置入11100000
RR A ;右移位
AJMP LOOP ;循環(huán)右移位
這樣在寄存器A中存儲的值會有如下循環(huán)11100000→01110000→00111000→00011100→00001110→00000111→10000011→11000001→11100000,其奇數(shù)位有如下循環(huán)1000→1100→0100→0110→0010→0011→0001→1001→1000,其偶數(shù)位有如下循環(huán)1100→0100→0110→0010→0011→0001→1001→1000→1100.將A輸出到P0端口,則奇數(shù)位和偶數(shù)位正是我們所需要的步進(jìn)電機(jī)輸入信號。
而事實(shí)上每個電機(jī)的動作是不同的,為此我們在RAM中為每個電機(jī)開辟一個byte的狀態(tài)字節(jié)用以循環(huán)移位.在每一個電機(jī)周期里,根據(jù)需要對每個電機(jī)的byte進(jìn)行移位,并用ANL指令將兩個電機(jī)的狀態(tài)合成到一個字節(jié)里輸出此時(shí)的A同時(shí)可以控制兩個電機(jī)了
步進(jìn)電機(jī)的速度由驅(qū)動脈沖的頻率決定,移位的周期不同,電機(jī)的速度也就不同了.前面提到的電機(jī)周期,應(yīng)該取各種可能的周期的最大公約數(shù).換句話說,一旦電機(jī)周期取定,每個電機(jī)移位的周期應(yīng)該是它的倍數(shù).在程序中,對每個電機(jī)的相應(yīng)時(shí)刻設(shè)定相應(yīng)的分頻比值,同時(shí)用一個變量進(jìn)行加一計(jì)數(shù):每到一個電機(jī)周期若計(jì)數(shù)變量<分頻比值,則計(jì)數(shù)變量加1;若相等,則移位,計(jì)數(shù)變量清零.這樣就實(shí)現(xiàn)了分頻調(diào)速,可以讓多個電機(jī)同時(shí)以不同的速度運(yùn)轉(zhuǎn).
另外,也可以采用傳統(tǒng)的查表方式進(jìn)行驅(qū)動,程序稍長,但也比較穩(wěn)定,這種方法非常適合三相步進(jìn)電機(jī)。
2.步進(jìn)電機(jī)的智能驅(qū)動方案
步進(jìn)電機(jī)有可以精確控制的優(yōu)點(diǎn),但是功耗大,效率低,力矩小。如果選用大功率步進(jìn)電機(jī),為了降低功耗,可以采取PWM恒流控制的方法。基本思路是,用帶反饋的高頻PWM根據(jù)輸出功率的要求對每相恒流驅(qū)動,總體電流順序又符合轉(zhuǎn)動順序。需要力矩小的時(shí)候應(yīng)及時(shí)減小電流,以降低功耗。該方案實(shí)現(xiàn)的電路,可以采用獨(dú)立的單片機(jī)或CPLD加場效應(yīng)管驅(qū)動電路以及電流采樣反饋電路。
-
三極管
+關(guān)注
關(guān)注
143文章
3616瀏覽量
122106 -
繼電器
+關(guān)注
關(guān)注
132文章
5354瀏覽量
149197 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
150文章
3114瀏覽量
147600
發(fā)布評論請先 登錄
相關(guān)推薦
伺服電機(jī)控制性能的優(yōu)點(diǎn)
五類控制電機(jī)
直線電機(jī)具有什么優(yōu)點(diǎn)?直線電機(jī)采用什么控制系統(tǒng)?
步進(jìn)電機(jī)力矩的怎么計(jì)算
步進(jìn)電機(jī)相比伺服電機(jī)具有哪些優(yōu)點(diǎn)?
CAN總線步進(jìn)伺服一體機(jī)閉環(huán)步進(jìn)電機(jī)具有哪些特點(diǎn)及優(yōu)點(diǎn)?
閉環(huán)控制步進(jìn)電機(jī)對比傳統(tǒng)開環(huán)控制的優(yōu)點(diǎn)
單片機(jī)對步進(jìn)電機(jī)的無線控制





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論