 基于TMS320F2806實現感應電機矢量控制硬件設計方案
基于TMS320F2806實現感應電機矢量控制硬件設計方案
隨著DSP和功率器件的發展,變頻調速技術已成為科技發展的主要動力。隨著帶有實時信號處理器的電機控制專用器件和高集成度的智能功率模塊(IPM)的引入,使得變頻器供電的感應電機控制系統應用廣泛。由于功率變換器能實時調節電機電壓、電流幅值和頻率,所以這種控制系統可獲得最佳性能。
傳統的恒壓頻比控制是感應電機最基本的常用控制方式之一,但這種方式是從電機的機械特性出發分析電機的運行狀態和特性的,動態效果不理想。而感應電機矢量變換控制可使感應電動機的調速性能與直流電機相媲美。矢量變換技術巧妙實現感應電機磁通,轉矩的重構和解耦控制,從而使感應電機調速系統趨于高性能。實現矢量變換控制需要實時完成坐標變換、轉速控制、電流檢測、磁鏈估計、PWM信號生成及故障檢測保護等功能,處理數據量大,實時性和精度要求高。與傳統的單片機相比,DSP具有高集成度,快速的CPU,大容量存儲器,可提供高速同步串口和標準異步串口,尤其是DSP精簡的指令系統、獨立的程序和數據空間等使其具有高速的數據運算能力,可設計出結構簡單、性能優越的矢量控制調速系統,因此DSP廣泛應用于電機控制系統。
本文介紹了TMS320F2806的基本結構和性能,給出了感應電機矢量控制(轉子磁場定向控制)的硬件設計方案、軟件控制算法。該系統設計充分利用TMS320F2806豐富的外圍元件和較強的運算能力,系統電路結構簡單,抗干擾強。實驗結果表明,該矢量控制系統具有良好的動靜態調速性能。
2 TMS320F2806簡介
TMS320F280x系列是美國德州儀器公司的數字信號處理器,該系列處理器是基于TMS320C2xx內核的定點DSP,是集成度較高、性能較強的運動控制系列器件。器件內部集成多種先進的外設,為電機及其他控制應用提供良好平臺。TMS320F280x系列內部功能結構如圖1所示。
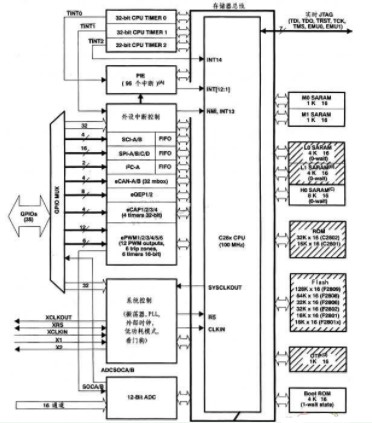
TMS320F280x系列數字信號處理器與先前的TMS320F24x系列相比,提高了運算精度和系統處理能力;與TMS320F281x DSP控制器相比。省去了TMS320F281x DSP中的兩個事件管理器模塊EVA和EVB,事件管理器模塊的功能由增強型外設模塊ePWM、eCAP和eQEP取代,使得設計人員能有效地解決富有挑戰性的控制問題。TMS320F280x高速的運算能力保證了控制實時性,大容量存儲空間無需擴展片外RAM就能滿足存儲需求,保證了控制系統的高度可靠性,是電機數字化控制的升級產品。TMS320F2806的主要特點如下:
采用高性能靜態CMOS技術,內核與I/O的供電電壓分別為1.8 V和3.3 V,降低了控制器損耗;100 MI/s的執行速度使指令周期縮短至10 ns,提高控制器的實時控制;
片內含有高達32 KB×16的Flash程序存儲器、10 KB×16 bit的SRAM、10 KB×16 bit的OTPROM以及4 KB ×16 bit的Boot ROM;
12位A/D轉換器,最小轉換時間為160 ns,8個或16個多路復用輸入通道,采樣時間與轉換時間分開,提高了采樣率和輸入阻抗。支持自動順序采樣,無需CPU干預;
多達16路的PWM為高效的馬達控制(雙電機控制)提供便利,其中6路為HRPWM(高分辨率脈寬調制),時間步長精度高達到150 ps,可控制所有類型電機;
eCAN總線控制器可為控制器、傳感器、激勵源以及其他節點提供良好通訊,適用于工業現場和汽車等大噪聲和惡劣環境。
3三相感應電機系統硬件電路設計
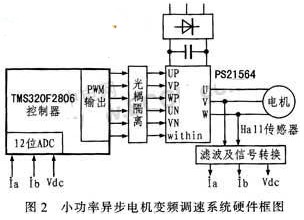
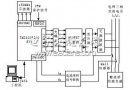
基于TMS320F2806控制的小功率異步電機變頻調速系統硬件框圖如圖2所示。變頻器系統采用DSP作為運算控制單元,功率電路變換單元采用三菱公司的第五代低功耗智能型模塊(IPM) PS21564,采用萊姆公司的霍爾電流傳感器檢測電機兩相電流,采用霍爾電壓傳感器檢測逆變器的母線電壓。三相工頻電源經整流橋整流,經電容濾波得到直流電壓,送至逆變器IPM模塊的直流輸入端的P端和N端。TMS320F2806控制器對檢測信號進行運算處理,空間矢量算法產生3個互差120°的3對SVP-WM脈沖信號,經光電隔離后作用于PS21564控制輸入端(UP、VP、WP、UN、VN和WN)。PS21564的輸出端U、V和W輸出3個互差120°的高壓SVPWM波形以驅動異步電機,改變其輸出頻率,實現異步電機變頻調速。由于PS21564具有短路、欠壓、過熱檢測電路及保護功能,當發生故障時,PS21564鎖存內部6只ICBT功率管,同時將故障信號發送至TMS320F2806的功率保護中斷引腳;TMS320F2806立即鎖存PWM波形的輸出,并向TMS320F2806發送功率保護中斷請求。
4三相感應電機矢量控制軟件設計
矢量變換控制(簡稱矢量控制)是以電機物理結構建立的系統數學模型為基礎,經一系列矢量變換(三相-兩相變換(Clarke變換)、矢量旋轉變換(Park變換、Park逆變換),將原來系統數學模型變換成公共坐標系統中的等效正交兩相模型(dq模型),獨立控制公共坐標系統中相關矢量(如電流或磁鏈等)的各分量.利用矢量的反變換獲得三相坐標系統中的控制量(如電流、電壓)大小,實現感應電機的控制。
感應電機矢量變換控制中的公共坐標系統(dq)通常將d軸建立在某一磁場對應的矢量位置上,也就是由該磁場矢量確定公共坐標系統,因此感應電機矢量變換控制也稱為磁場定向控制(Field-Oriented Control,簡稱FOC)。三相感應電機存在三種磁場:定子磁場、氣隙合成磁場、轉子磁場,因此有三種磁場定向控制方法。本系統控制采用轉子磁場定向控制。
4.1三相感應電機矢量控制算法
為了達到高精度的轉速閉環控制及磁場定向,必須在電機軸上安裝速度傳感器。但許多場合不允許外接任何速度和位置檢測元件,安裝速度傳感器在一定程度上會降低調速系統的可靠性,因此本文采用基于轉子磁通定向的無速度傳感器矢量控制變頻調速。轉子磁場定向算法功能框圖如圖3所示。本系統設計關鍵在于通過磁通估計模塊計算磁鏈和磁通角,然后通過開環速度估計模塊估算轉子角速度。圖3中的上標"s"、"e"分別表示靜止坐標系和同步旋轉坐標系,上標"i"、"v"分別表示電流模型和電壓模型,下標"d"、"q"分別表示d軸和q軸上的矢量分量,下標"s"、"r"分別表示定子和轉子的參數。
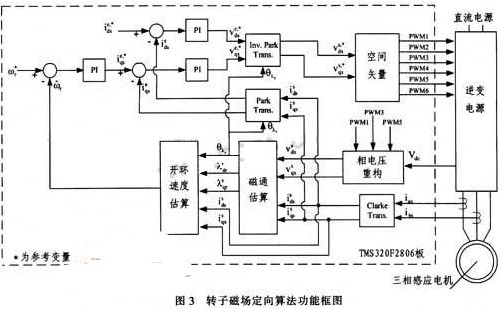
為使系統具有良好的動態性能和穩態精度,速度控制器和電流控制器采用積分分離的PI控制,定子電流的轉矩分量給定值ie*qs和勵磁分量給定值ie*ds都在同步的旋轉坐標系中給出,ie*qs是速度控制器的輸出,ie*ds與轉子磁鏈給定值成比例,可直接給出。兩個電流控制器的輸出即為定子電壓矢量給定值在同步旋轉坐標系中的兩個分量ve*qs、ve*ds,它們經過逆Park變換和空間矢量變換模塊,再由DSP的脈沖發生電路最終生成PWM信號。電流反饋信號經Clarke變換和Park變換得到兩個電流的反饋量ieds和ieqs。磁通估計模塊的輸入由電壓反饋信號經相電壓重構模塊的輸出和Clarke變換的輸出構成,通過磁通估計模塊算法計算轉子磁通角θλr,最后由速度估計模塊得到速度的反饋值?r。
4.2三相感應電機矢量控制軟件實現
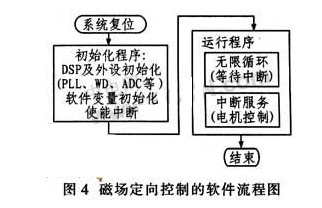
控制軟件由初始化程序和運行程序組成,其軟件流程圖如圖4所示,其中初始化程序完成DSP硬件及軟件變量的初始化及使能中斷。運行程序則包括無限循環和中斷服務程序,中斷服務程序由電流及轉速檢測信號處理、坐標變換、磁通估計、開環轉速估計、SVPWM信號產生等功能模塊構成。各功能模塊依照一定的順序,在固定的時間周期內執行,利用EPWM1時基CNT_zero中斷啟動程序的運行。
5 實驗結果
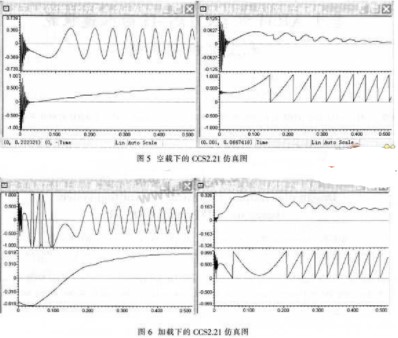
為了使系統具有良好的可移植性.對所有物理變量(電流、電壓、磁鏈、磁通角、速度、轉矩等)都進行歸一化(Per Unit-Pu)預處理。其中:電機轉速參考值設置為ω*r=0.5Pu=900 rpm(1Pu=1 800 rpm)、負載轉矩T1=0.136Pu(1 N.m)、勵磁分量給定值ie*ds=0.4Pu(2 A)。本系統以TMS320F2806 DSP為核心,采用32位定點算法(調用IQmath庫函數),用C語言編寫程序,通過CCS2.2開發環境仿真試驗,電機空載和加載運行結果如圖5、圖6所示。對照兩種仿真結果看出,本設計方案無論空載還是加載,電流波形正弦良好。系統能迅速達到穩態幾乎無超調,且穩態誤差小,電機運行平穩。
6結束語
實驗結果表明,本文所提出的無速度傳感器矢量控制方案設計合理,控制精度高,具有良好的動靜態性能。該系統是基于高性能數字信號處理器TMS320F2806,結合傳統電壓模型法和電流模型法的優點,在高速和低速范圍內都能準確地觀測磁鏈,實時完成變換控制策略的坐標變換、轉速控制、電流檢測、磁鏈(磁通)估算、PWM信號生成,從而實現三相感應電機的高性能變頻調速控制。
-
傳感器
+關注
關注
2552文章
51382瀏覽量
755819 -
dsp
+關注
關注
554文章
8059瀏覽量
349888 -
電機
+關注
關注
142文章
9081瀏覽量
146176
發布評論請先 登錄
相關推薦
請問TMS320F2802和TMS320F2806能不能同時輸出4路獨立的PWM?
請問TMS320F28069F和TMS320F28069有區別嗎?
數字信號處理器TMS320F2806電子資料
TMS320F2809, TMS320F2806, TMS3
基于MRFAS模型的感應電機無速度傳感器矢量控制系統
基于TMS320F2806的感應電機控制系統
TMS320F2808實現矢量控制變頻調速系統

基于TMS320F240的矢量控制變頻調速系統





 工商網監
工商網監
評論