 “視力+智力”的毫米波雷達,有望顛覆未來車載傳感器市場
“視力+智力”的毫米波雷達,有望顛覆未來車載傳感器市場
麥姆斯咨詢認為毫米波雷達技術的發展趨勢是朝著體積更小、功耗更低、集成度更高和多傳感器融合方向發展。毫米波雷達目前最大的“缺陷”就是“視力”不足,無法辨識行人和對周圍障礙物進行精準的建模,而“視覺”是實現高級自動駕駛最重要的環境感知。所以,為了幫毫米波雷達實現“視覺”功能,現在主流的做法是采用取長補短的方式,將毫米波雷達與其他“視覺”傳感器(攝像頭或激光雷達)技術融合。不過無論是攝像頭,還是激光雷達都容易受光線或惡劣天氣影響,性能會降低甚至失效,這種“視力”是有條件限制的。
于是,很多新興企業在探索創新的毫米波雷達成像技術,意圖讓雷達自己“開眼”。要想雷達成像,最核心的方向是提高雷達的分辨率。傳統的提高雷達分辨率方法中,增加帶寬是一種方式,當前77GHz(頻段76~77GHz)帶寬在1GHz,而79GHz(頻段76~81GHz)帶寬可高達5GHz,顯然79GHz在分辨率上會更勝一籌而成為未來雷達成像主要的選擇。當然帶寬有固定限制,還有一種方法就是擴展天線的尺寸或者增加天線的數量。在車載毫米波雷達領域,囿于主機廠對毫米波雷達整體尺寸的車規級限制,這里的發揮空間并不大。所以,需要突破常規另辟蹊徑,目前比較熱門的方法有:合成孔徑雷達(SAR)、多輸入多輸出技術(MIMO)、超材料天線技術等。目前,部分技術已經取得了突破性的進展,智能雷達的圖像分辨率已經迫近現有光學分辨率。下面我們概述這些雷達成像技術。
合成孔徑雷達(SAR)合成孔徑雷達(Synthetic Aperture Radar,簡稱SAR),是一種利用合成孔徑技術及脈沖壓縮等信號處理技術來實現高分辨率成像的雷達。SAR利用雷達與目標的相對運動,把尺寸較小的真實天線孔徑用數據處理的方法合成一個較大的等效天線孔徑,故稱“合成孔徑”雷達。SAR具有體積小、全天時、全天候、高分辨、大幅寬等多種特點。最初主要是機載、星載平臺,隨著技術的發展,出現了彈載、地基、無人機、臨近空間平臺、手持式設備、車載等多種形式平臺搭載的SAR,廣泛用于軍事和民用領域。高分辨率在這里包含著兩方面的含義:即高的方位向分辨率和足夠高的距離向分辨率。它采用多普勒頻移理論和雷達相干理論為基礎的合成孔徑技術來提高雷達的方位向分辨率;而距離向分辨率的提高則通過脈沖壓縮技術來實現。其基本原理如下(圖1):
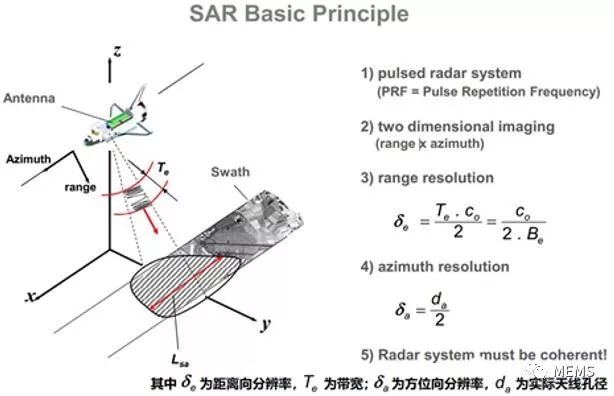
圖1 SAR基本原理(1)合成孔徑技術實現方位向高分辨率SAR利用機載平臺帶動天線運動,如圖2,在不同位置上以脈沖重復頻率(PRF)發射和接收信號,并把一系列回波信號存儲記錄下來,然后作相干處理,就如同在所經過的一系列位置上,都有一個天線單元在同時發射和接收信號一樣,這樣就在平臺所經過的路程上形成一個大尺寸的陣列天線,從而獲得很窄的波束。如果脈沖重復頻率達到一定程度(足夠高),以致相鄰的天線單元間首尾相接,則可看作形成了連續孔徑天線。誠然這個大孔徑天線要靠信號處理的方法合成。這也是“合成孔徑”名字的原由。
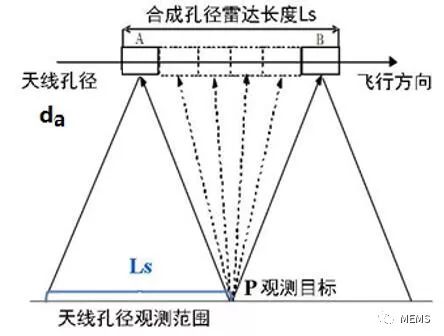
圖2 SAR示意圖根據SAR方位向分辨率的公式(見圖1公式4),我們可以得知SAR的分辨率與波長和目標與天線的距離無關,而只與雷達的實際孔徑尺寸有關,而且天線尺寸越小,方位向分辨率越高,這與普通雷達的方位分辨率恰恰相反,從而大大的減小了雷達的體積,對頻率特定和空間有限的車載平臺而言是再合適不過了。(2)脈沖壓縮技術實現距離向高分辨率雷達距離向分辨率由雷達的帶寬決定(見圖1公式3),要想提高雷達的距離分辨率,則可減小脈寬或加大寬帶,但如果脈寬太小則平均功率太小,雷達的作用距離會受到很大的限制,所以我們希望雷達波形既具有較大的帶寬,又具有較長的持續時間。如果在一個帶寬信號的各頻譜分量上附加一個隨頻率作非線性變化的相位值,此寬帶信號將具有很長的持續時間,以滿足前述要求。這種附加的非線性相位的過程稱為信號的展寬過程,將展寬后的信號通過匹配濾波器,校正非線性相位使之同相,在匹配濾波器輸出端將得到窄脈沖型號,這個過程稱為脈沖壓縮。
最早加以研究并獲得使用的脈沖壓縮信號就是線性調頻信號,線性調頻信號具有平方律的相位頻率關系,經過匹配濾波器的壓縮,可以輸出窄脈沖。總之,采用脈沖壓縮波形,相對于原來的寬脈沖而言,由于通過匹配濾波器的壓縮,大大的改善了雷達的距離分辨率。多輸入多輸技術(MIMO)多輸入多輸出技術(Multiple-Input Multiple-Output,簡稱MIMO),是指在發射端和接收端分別使用多個發射天線和接收天線,使信號通過發射端與接收端的多個天線傳送和接收,在不增加頻譜資源和天線發射功率的情況下,可以成倍的提高系統信道容量。與SAR思想不同,MIMO雷達是利用多發多收的天線結構等效形成虛擬的大孔徑陣列,以獲得方位向的高分辨力。而這種虛擬陣的形成是實時的,能夠避免傳統的SAR成像中存在的運動補償問題。故MIMO雷達在成像應用上有其獨特的優勢。
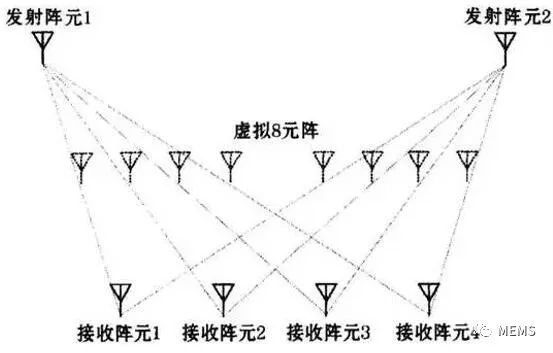
圖3 MIMO示意圖
如圖3,一對發射陣元和接收陣元可以虛擬出一個收發陣元,則對于M發N收的MIMO雷達,發射陣元和接收陣元共有M x N對,即可以虛擬出M x N個收發陣元,其個數一般是遠遠大于N的,從而實現了陣列孔徑的擴展。例如2發4收的MIMO雷達,可以形成8元的虛擬陣列。如此,德州儀器(TI)3發4收的AWR1243雷達,可以形成12元的虛擬陣列。
圖4 德州儀器MIMO雷達的FFT輸出圖圖4為TI測試的MIMO雷達的FFT輸出圖,很明顯通道數越多,精細程度就越高。TI通過級聯4個單芯片AWR1243雷達前端器可以實現成像功能。AWR1243中集成的DSP能夠將無線電波捕獲的數據轉譯為點云圖。如圖5,顯示了TI級聯雷達傳感器創建的圖像。該級聯雷達能探測250 m以外的車輛,40米處可以做到1度的方位角分辨率,也就是4.5厘米的精度和大約9厘米的物體分離精度。MIMO具備很寬的視場角(FOV),TI這種4個級聯的雷達FOV高達192度。而攝像頭的話80度的FOV都算是廣角了,邊緣處可能有廣角失真。
圖5 TI級聯雷達傳感器創建的圖像MIMO-SAR雷達傳統SAR是對三維(3D)場景的二維(2D)成像,圖像中所有的像素點實際是具有相同距離的所有俯仰向散射體的迭加,因而存在著圓柱對稱模糊、疊掩現象等問題,難以滿足越來越高的成像精度和復雜環境偵查的要求。結合了MIMO和SAR兩種技術優勢的MIMO-SAR雷達,能夠在距離向寬帶分辨和方位合成孔徑分辨的基礎上增加俯仰向實孔徑的分辨能力。通過俯仰向并行收發以及優化布陣,可以獲取目標的第3維信息(高度),避免3D空間到2D平面投影的信息損失。因此,MIMO-SAR雷達是實現3D成像的最佳解決手段之一。以色列創新公司Arbe Robotics最先實現了高分辨率的4D成像雷達(3D位置+1D速度),該雷達就是采用了結合MIMO的SAR的成像技術。根據Arbe Robotics公司發布的在線演示數據顯示(圖6),Arbe Robotics高分辨率雷達可提供“100度的寬視場(FOV)”,可探查到300米外的障礙物,其方位角分辨率及仰角分辨率分別達到1°和3°。
圖6 Arbe Robotics 4D高分辨率雷達在線演示數據超材料天線+SAR除了利用MIMO和SAR技術提高雷達分辨率外,還可以考慮改變天線自身材料結構特性來提高雷達的分辨率,其中超材料(metamaterial)就是種不錯的選擇。所謂超材料,是指一些具有人工設計的結構并呈現出天然材料所不具備的超常物理性質的復合材料。超材料的設計思想是新穎的,這一思想的基礎是通過在多種物理結構上的設計來突破某些表觀自然規律的限制,從而獲得超常的材料功能。典型的超材料有:左手材料、光子晶體、超磁性材料、金屬水等。
圖7 具備人工特殊結構的“超材料”2017年3月,美國杜克大學搭建了基于動態超表面孔徑的SAR,并進行了2D和3D成像測試。該系統靈活、高效、價格便宜,生成的圖像質量不低于傳統合成孔徑雷達。這個雷達的天線由互補、諧振的超材料單元組合的微帶線構成,每一個超材料單元包含兩個偶極子,與外部控制電路相連,超材料單元的諧振可通過偏置電壓進行衰減控制。動態超表面孔徑的每一個諧振電路發射并接收某一特定的頻率,工作頻率也可通過調諧電路的電子特性進行更改,類似于無線電調諧器。孔徑產生的總輻射方向圖是每一單個輻射器的輻射方向圖的疊加。通過給控制電路施加不同的電壓,可接通部分輻射單元,形成不同指向、不同形狀的方向圖,并可為每一波束選擇特定的工作頻率。動態超表面提供的靈活性能夠給SAR帶來多種能力,可形成窄波束增強信號強度,在方向圖上形成零點回避干擾,也可使用寬波束觀察大范圍區域,甚至可以同時形成多個波束探測多個位置,如圖8。由于動態超表面可以大批量低成本印制,將會顯著降低雷達的成本。
圖8 超材料孔徑雷達原理示意圖備受上汽、現代、英飛凌等青睞的硅谷創新公司麥得威國際(Metawave),其智能汽車雷達系統WARLORD采用了一種自適應超材料。該超材料由微軟件控制,具有獨特電磁特性的電路板結構(圖9),可模擬相控陣。傳統的相控陣天線采用多個輻射元件,通過輕微改變信號發射的相位來形成波束并進行波束轉向,但是,Metawave的系統僅利用一個單天線便能提供同等的性能。其結果便是顯著簡化系統,使其更高效,以獲得最先進的數字波束成形雷達。
圖9 Metawave采用的自適應超材料
人工智能和算法融合前面我們探討的幾種技術——SAR、MIMO和超材料,彼此并不沖突,可以疊加使用,獲得更高的探測物體的精度。不過這些技術都只是幫助雷達增長“視力”,使其能夠“看的見”和“看的清”,但自動駕駛的最終目的,是對人的解放,更重要的還要讓雷達具有“智力”,能夠識別所探測到的物體到底是什么,只有“明白是什么”才能為駕駛做出正確的判斷和決策,才能真正實現無人駕駛。所以在各類成像雷達技術中還融合了人工智能算法。要獲得高分辨率,數據的采集量和處理量是龐大的,特別自動駕駛對實時處理要求又特別苛刻,因此雷達成像首先對數據的存取和處理速度帶來了極大的挑戰。
之前,77Ghz雷達的大多是采用多芯片的方案,開發難度、測試設備等都需要長時間線的驗證。不過隨著各主要半導體芯片供應商德州儀器(TI)、意法半導體(ST)、亞德諾(ADI)、恩智浦(NXP)等相繼推出77GHz CMOS毫米波芯片,尤其是CMOS單片微波集成電路(MMIC)的量產正改變這種格局。MMIC一方面降低了整個77Ghz雷達的研發難度,產品合格率與成本都會發生很大變化;另一方面,單芯片的高度集成,甚至可以與微控制單元(MCU)和數字信號處理(DSP)集成在一起,也就意味著可以在雷達芯片上集成能夠進行模式識別和機器學習的算法,從而讓雷達能夠“識人辨物”。
另外,還可以讓這些具備機器學習能力的雷達和其它攝像頭、慣性測量單元等傳感器進行融合,為自動駕駛汽車增加更多的安全保障。比如,Arbe Robotics在其智能雷達中融合了同時定位與地圖構建(SLAM)算法,能夠和4D成像系統協同工作,改善目標物體分類和識別,增強分辨率,去除造成系統故障和事故的誤報(圖10)。
圖10 Arbe Robotics 4D高分辨率雷達目標物體識別和分類又如,Metawave在其智能雷達WARLORD中嵌入了人工智能引擎(AI Engine),內置了多種算法,包括雜波干擾抑制算法、目標檢測和跟蹤算法等等,極大的提升了毫米波雷達的整體性能,讓其具備物體識別和分類能力(圖11)。
圖11 Metawave 智能雷達WARLORD目標物體識別和分類
隨著這些成像技術的不斷發展和人工智能算法的日新月異,毫米波雷達在成像性能上正不斷接近現有的激光雷達性能,這些新型雷達甚至有取代部分激光雷達的趨勢。其次,毫米波雷達在工藝成本和體積上也優于當前昂貴且笨重的激光雷達,再加上毫米波雷達固有的全天候全天時優勢。我們相信假以時日,有了“視力”和“智力”的毫米波雷達,猶如打通了任督二脈,前途不可限量,有望顛覆車載傳感器市場,無論是現階段的ADAS,還是更高階的自動駕駛,甚至是終極的無人駕駛,都將是自動駕駛中最不可取代的核心傳感器!
-
傳感器
+關注
關注
2551文章
51195瀏覽量
754430 -
攝像頭
+關注
關注
60文章
4849瀏覽量
95848 -
毫米波雷達
+關注
關注
107文章
1047瀏覽量
64411
原文標題:視力+智力,打通毫米波雷達“任督兩脈”,誰與爭鋒?
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
毫米波雷達信號的傳輸特性
毫米波雷達與超聲波雷達的區別
康謀技術 | 毫米波雷達技術解析



簡述毫米波雷達的結構、原理和特點
除了“上車”,毫米波雷達還可以有很多選擇

基于毫米波雷達的手勢識別算法
安信可雷達系列的超低功耗人體存在毫米波傳感器—Rd-03L





 工商網監
工商網監
評論