 基于電驅動鉆機的數模混合型交流電子負載控制方案
基于電驅動鉆機的數模混合型交流電子負載控制方案
1 引言
電動鉆機的動態模擬實驗是研究和檢驗自動送鉆系統的動力以及其他一些自動裝置的重要手段。動態模擬實驗中為了對電動鉆機動力系統不同的狀態進行模擬,需要選擇不同值的阻抗和負荷,但是實驗中一般加載的都是純電阻的負載,不能真實有效地模擬負載特性。而交流電子負載是一種可以模擬真實阻抗的電力電子裝置。交流電子負載是不僅能模擬真實負載某些特性的電子設備,還可以模擬不同數值的電阻、電感、電容及其組合,對于非線性負載某些特性也可模擬。電子負載通過控制輸入電流達到模擬各種負載的目的,具有調節方便、通用性強、精度高、穩定性好等優點,特別是交流電子負載還可將被試電能以單位功率因數回饋給電網,可大大節約電能,在能源短缺的今天有很好的發展前景。
首先介紹了交流電子負載的拓撲,然后提出了一種基于DSP的交流電子負載的控制策略,最后給出了實驗結果。
2 交流電子負載的拓撲
電動鉆機的動力系統一般是由柴油發電機組構成,它們的輸出端并接在同一個交流母線上。
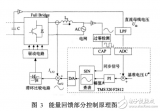
圖1給出了交流電子負載主電路的拓撲。主電路采用具有中間直流環節的AC/DC/AC兩級變換電路,這樣能夠分開控制電子負載的輸入、輸出電流,及使輸入、輸出工作于不同頻率。其輸入、輸出變流器均采用電壓型PWM整流器,前級PWM整流器經電感L1被試電源構成負載特性模擬部分;后級PWM整流器經電感L2和變壓器T1柴油發電機組的交流母線(或電網)構成能量回饋部分。
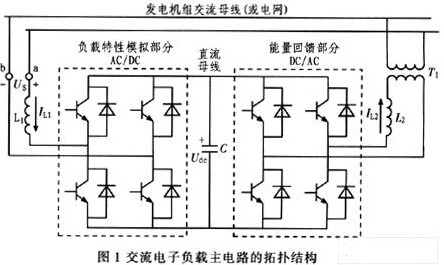
通過直接控制交流側電感電流,電壓型PWM整流器(VSR)可以實現4象限運行,能量可以雙向流動。負載特性模擬部分工作在AC/DC狀態,采用單一的電流瞬時值控制方式,通過控制電感電流IL1。的幅值以及與輸入電壓US之間的相位,可以改變電子負載輸入端口ab的等效阻抗,實現模擬不同大小、不同性質的負載。能量回饋部分工作在DC/AC狀態,采用雙閉環控制輸出網側電流IL2的大小、波形及直流側母線電壓,工作在并網逆變狀態,以單位功率因數將被試電能回饋電網。
3 控制方法
3.1 負載特性模擬控制策略
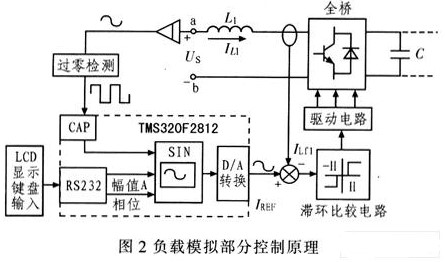
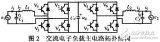
如圖2所示,負載特性模擬部分為電流單環控制。首先采樣交流輸入電壓,經過過零檢測電路后產生的方波信號送入DSP的捕獲口(CAP)作為相位同步信號。DSP內部通過軟件生成一個與交流輸入電壓同頻率且相位、幅值可調的正弦基準電流信號IREF,通過D/A轉換器轉換為模擬信號輸出。采用滯環電流控制技術實現電感電流對基準電流的實時跟蹤。通過改變基準電流給定相位θ,可調節電感電流IL1與輸入電壓US之間的相位,實現模擬不同功率因數(變化范圍為一l~+1)負載的功能,而通過調節基準電流給定幅值A改變所模擬的負載。通過外部的顯示和鍵盤接口設定工作模式、負載大小及功率因數,經過運算可得到基準電流幅值A和相位。
3.2 能量回饋控制策略
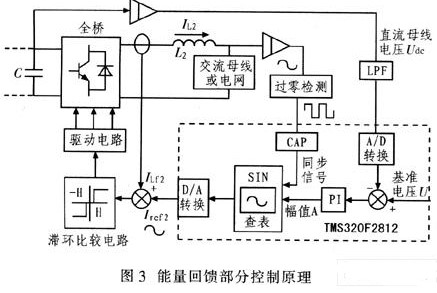
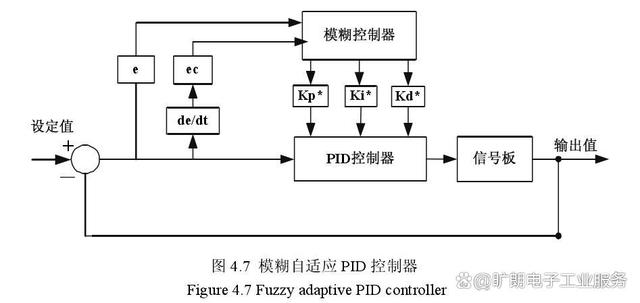
能量回饋部分采用電壓電流雙閉環控制,如圖3所示,通過DSP的數模轉換器采樣支流母線電壓,與基準電壓相比較,經過比例積分環節(PI),其輸出作為內環基準的幅值。由過零檢測電路和CAP完成基準信號與交流母線(或電網)電壓相位同步的功能,電流內環采用三態滯環控制實現電感電流對基準電流的實時跟蹤。能量回饋部分在保持直流母線電壓穩定的同時,將負載模擬部分輸送過來的電能以單位功率因數反饋電網。由于直流母線電壓含有兩倍基波頻率的脈動,采樣后需要經過一級低通濾波環節(LPF)。
前后兩級中的滯環電流控制部分均由模擬電路實現,虛線框中的功能由DSP實現,為一種數模混合型的控制系統。通過公用電感電流基準信號,可方便實現多個電子負載模塊的并聯運行,從而更加靈活配置整個系統的容量。可采用上位機通過RS232通訊接口分配各并聯電子負載的工作參數,監控整個測試過程。提高檢測的自動化程度,減少人力成本。
4 實驗結果
在輸入交流電壓為120 V/45 Hz時,測試了模擬不同功率因數負載的情況。圖4(a)為模擬阻性負載的情況,電感電流IL1和輸入電壓US同相。圖4(b)中顯示了模擬功率因數為0.75的感性負載的情況,電感電流滯后輸入電壓41°.通過改變基準電流IREF的相位即可以控制電感電流的相位。圖4(c)、(d)分別顯示了電感電流與輸入電壓相位相差±30°。實現了模擬阻性、感性和容性負載。

5 結語
基于電動鉆機測控系統動態模擬實驗,提出一種基于DSP的數模混合型交流電子負載控制方案。該方案能夠完全模擬不同性質的負載特性,并將柴油發電機組發出的電能回饋交流母線(或電網),與傳統負載比具有節能,使用方便等特點。
-
dsp
+關注
關注
553文章
7987瀏覽量
348764 -
電感
+關注
關注
54文章
6136瀏覽量
102300 -
發電機
+關注
關注
26文章
1634瀏覽量
67612
發布評論請先 登錄
相關推薦
能源回收式交流電子負載的技術原理和應用場景
三相交流電子負載前景展望
供應 Chroma 63803交流電子負載
交流電子負載的發展過程及展望
基于DSP的交流電子負載的控制策略
單極性SPWM控制的能饋型交流電子負載
大功率能量回饋式單相交流電子負載研究
為什么交流電子負載研發如此重要
直流電子負載測試交流電源方案的可行性評估





 工商網監
工商網監
評論