


引言
發電機組的功率-頻率特性和勵磁-無功(電壓)特性是影響電力系統安全經濟運行的最 重要的兩組物理量。電力系統的頻率主要取決于原動機的出力,系統頻率變化是由于發電機 的負荷與原動機輸入功率之間失去平衡所致。當頻率下降較多時,對系統運行極為不利,甚 至造成系統崩潰的嚴重后果。因此精確快速測量發電機的轉速關系到整個模擬系統動態性 能,是發電機原動系統中至關重要的一個參數。
目前常用的數字測速方法M\T法,本系統為了測量發電機的功角,必須在轉軸上套一個 有兩個齒的齒輪(由于動模實驗室的發電機是兩對磁極每分1500轉),在每個測速周期內, 同時計取光電脈沖個數m1和時標脈沖個數m2。測速周期Td =Te+ΔT。其中Te是固定部分,而 ΔT是指從Te結束到下一個光電脈沖到來這段時間。用下式可以計算轉速n。
n=A *m1/m2 (1)
A 是常數。
從上面的分析可以看出,采用M/T法測速,遇到的最大問題就是測速周期的不固定。ΔT 是不固定的,在原動機高速時ΔT較短,而在原動機低速時ΔT就會變得較長, 從而整個測速 周期也變得較長。這樣就帶來了兩方面的問題。①由于低速運行時測速周期的變長,使得控 制周期變長,速度采樣值長時間得不到更新,控制效果變差, 容易出現“爬行”等現象。②由于 低速運行時測速周期變長,使得時標脈沖的計數周期變長,如果不采用較長位數的計數器計取時標脈沖, 就會發生溢出。也就是說,一定位數長度的時標脈沖計數器對應著一定的可測 得的最低轉速,要測出很低的轉速,就需要很長位數的時標脈沖計數器,在式(1)中,m2是多字 節的數,計算式(1)需要做多字節的除法,增大了實時控制中的軟件開銷。該文提出了一種全 新的鎖相測速方法,采用這種方法,無論原動機高速運行還是低速運行,都可以獲得一個始終 跟隨原動機轉速值的14位的并行的測速結果,測速周期短,測量精度高。
1.1鎖相環基本介紹
鎖相的意義是相位同步的自動控制,能夠完成兩個電信號相位同步的自動控制閉環系統 叫做鎖相環,簡稱PLL(Phase Lock Loop )。其主要由相位比較器(PC)、壓控振蕩器(VCO)。 低通濾波器三部分組成,如圖1所示。
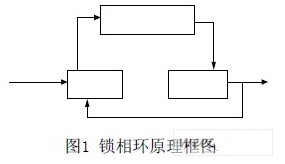
壓控振蕩器的輸出 Uo 接至相位比較器的一個輸入端,其輸出頻率的高低由低通濾波器 上建立起來的平均電壓 Ud 大小決定。施加于相位比較器另一個輸入端的外部輸入信號U i 與 來自壓控振蕩器的輸出信號o U 相比較,比較結果產生的誤差輸出電壓 U ψ正比于U i 和Uo 兩 個信號的相位差,經過低通濾波器濾除高頻分量后,得到一個平均值電壓 Ud 。這個平均值 電壓 U d朝著減小VCO輸出頻率和輸入頻率之差的方向變化,直至VCO輸出頻率和輸入信號 頻率獲得一致。這時兩個信號的頻率相同,兩相位差保持恒定(即同步)稱作相位鎖定。
當鎖相環入鎖時,VCO可在某一范圍內自動跟蹤輸入信號的變化,如果輸入信號頻率 在鎖相環的捕捉范圍內發生變化,鎖相環能捕捉到輸人信號頻率,并強迫VCO鎖定在這個 頻率上。
1.2鎖相測速原理
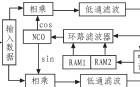
鎖相測速環節的基本結構如圖2示。
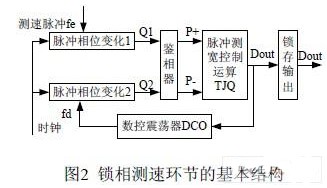
在圖2中,來自光電傳感器方波整形電路的脈沖fe與來自數字控制振蕩器DCO的脈沖fd分 別經過“脈沖相位變換器1”和“脈沖相位變換器2”變換成相位信號Q1和Q2。Q1與Q2的相位 差由“鑒相器”鑒得,如果Q1超前于Q2,相位差由P+的脈沖寬度表示;如果Q1滯后于Q2,相位 差由P-的脈沖寬度表示。環節TJQ的作用是測量P+或P-的脈沖寬度,并且在鎖相環中充當調節 器,使得鎖相環能夠迅速鎖定。在鎖定的情況下,Q1和Q2的相位差或者為零,或者為恒定值,這 時必有fe=fd。由于TJQ輸出的數據Dout與數控振蕩器DCO的輸出脈沖頻率fd成正比,將Dout鎖存 輸出,即可跟蹤光電脈沖編碼器的輸出脈沖的頻率fe,從而跟蹤原動機的轉速。
1.3鎖相測速環路的調節算法的研究
鎖相測速環節的動態結構如圖3。
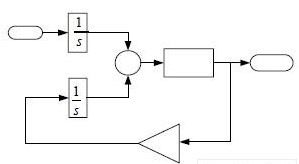
“脈沖相位變換”表示為積分環節;“數字控制振蕩器DCO”表示為比例環節,比例系數 是KF(采用2500線的光電脈沖編碼器,其輸出脈沖經過4倍頻處理。原動機的最高轉速為 3000r/min,光電編碼器的輸出頻率fe的最大值是2500×4×50=500kHz,所以DCO的最大輸出振 蕩頻率也是500kHz,測速輸出的是14位并行數據,所以,DCO環節的系數KF=500/214)。在原動機 穩態運行時,光電脈沖編碼器輸出的脈沖信號的頻率恒定,由于測速環路的被控對象中含有 一個積分環節,所以,在這種情況下,“調節器TJQ”中只需采用比例算法就可以實現對輸入信 號頻率的準確測量。但是,作為動模實驗室原動機仿真,原動機的啟動、制動、升速、降速是 頻繁發生的,光電脈沖的頻率在不斷的變化。在這樣的變化過程中,仍然要求鎖相測速環節能 夠快速跟蹤和準確測量輸入的光電脈沖信號的頻率。“調節器”僅僅采用比例算法就不夠了, 必須引入頻率前饋,采用復合控制,才能對變化的輸入光電脈沖信號的頻率進行準確測量。
2.測速實驗及結論
原動機仿真系統鎖相測環路試驗包括穩態和動態兩個方面。
由表1的測量結果可以看出,在整個測量的頻率范圍內,具有很好的測速(測頻) 精度和 線性度。表1中給出的最低的122.1Hz的輸入頻率是通過對標準的500kHz的頻率進行4096 分 頻而得到的,如果脈沖編碼器的分辨率為10000P/r,其對應的電機轉速為0173 r/ min。這完全 滿足原動仿真系統跟蹤的要求。
動態測速實驗主要是測試“鎖相測速裝置”對于變化的輸入頻率信號的跟蹤響應特性, 實驗這樣設計:被測的頻率是由“壓/頻變換器”產生,用輸入的電壓信號Vi控制“壓/頻變換 器”的輸出頻率。鎖相測速環節的輸出經由D/A轉換器再還原成輸出電壓信號VO ,用虛擬儀器 (存儲示波器)觀測VO 對于Vi的響應。動態測速實驗電路框圖如圖4所示,實驗結果如圖5所示。
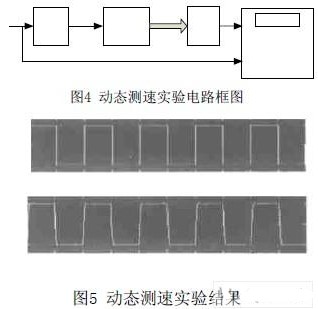
在圖4所示的實驗裝置上,輸入的Vi信號是頻率為100Hz,幅值為2V的方波,V/F變換器的增益 是50kHz/V。也就是說,當輸入的Vi信號是高電平時,V/F變換器輸出100kHz的頻率信號,經過 鎖相測速裝置,得出測速結果,再經過D/A轉換器將測速結果還原成輸出信號VO。從圖5可以看 出,VO 能夠較好地跟隨Vi的變化,這說明“鎖相測速環節”有較好的動態響應特性。
論文創新點:硬件由傳動的機械齒輪測速改為紅外光電測速,軟件實現方法由原來的T 法改為鎖相環跟蹤測速方法。實現了原動機低速時的高精度快速測量。在本系統中改變了傳統測速方法測量周期長的不足,將鎖相環技術應用本系統,能 實時跟隨原動機轉子的轉速,改善了系統的控制性能。
-
pll
+關注
關注
6文章
889瀏覽量
136389 -
頻率
+關注
關注
4文章
1560瀏覽量
60348 -
發電機
+關注
關注
26文章
1686瀏覽量
69511
發布評論請先 登錄
什么是鎖相環 鎖相環的組成 鎖相環選型原則有哪些呢?
基于鎖相環的轉子位置
MCU鎖相環的相關資料分享
數字鎖相環(DPLL),數字鎖相環(DPLL)是什么?

用鎖相環CD4046實現電動機轉速測量的研究





 工商網監
工商網監

評論