 采用模糊控制與PID控制結合提高液壓位置伺服系統的控制精度
采用模糊控制與PID控制結合提高液壓位置伺服系統的控制精度
1. 引言
當今,在工業、國防等自動化領域,液壓伺服系統以其重量輕、體積小、產生力矩大等優點而得到廣泛應用。但由于漏油、油液污染等因素影響,液壓伺服系統中普遍存在參數時變、非線性尤其是閥控動力機構流量非線性等現象。隨著對控制精度要求的提高,對液壓伺服控制技術也提出了越來越高的要求。傳統PID控制很難達到滿意的控制效果,針對這一問題,近年來出現了許多不同的現代控制策略,如神經網絡控制、自適應控制、模糊控制、預測控制等。這些控制方法在理論上取得很大進步,但是在液壓伺服控制中還有一些實際問題需要解決。
模糊控制不需要被控對象的精確數學模型,并且可以引入專家經驗,因此有較好的實用性。但單獨使用模糊控制不易消除穩態誤差,且對控制器運算性能要求較高,而PID算法簡單又可以較好的消除穩態誤差。對此,本文采用模糊控制與PID控制結合,利用模糊控制實時修正PID參數,提高了系統的控制精度和魯棒性,有較好的實用性。
2. 液壓位置伺服系統
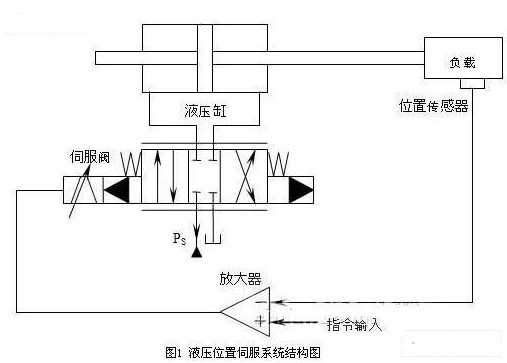
圖1 液壓位置伺服系統結構圖
如圖1所示,該液壓位置伺服系統由放大器、電液伺服閥、液壓缸、負載以及位置傳感器等組成。輸入信號經放大后送入電液伺服閥,小功率電信號經由伺服閥轉化為閥芯位移信號,然后轉換成流量和壓力等液壓信號,這些信號最后驅動液壓缸帶動負載完成指定動作。
因電液伺服閥實現了電液信號的轉換和液壓功率放大兩個功能,故電液伺服閥在伺服系統中起橋梁的作用,是系統的心臟,本文中位置伺服系統采用動鐵力矩馬達噴嘴擋板式兩級電液伺服閥。
根據力矩馬達的電壓、磁路和運動方程,噴嘴擋板位移與馬達的偏角關系以及主閥 (對稱四通滑閥)的運動方程和流量方程,可以推導出電液伺服閥傳遞函數如下:

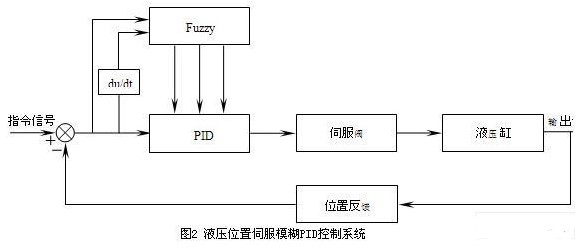
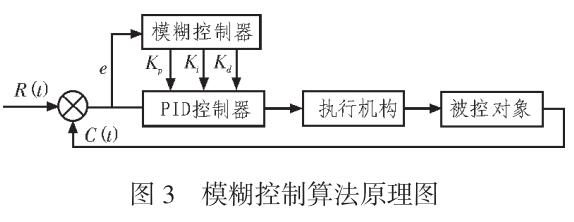
通過上述推導得到液壓位置伺服控制系統中液壓被控部分的數學模型(1)(2),然后在使用PID控制的基礎上經過模糊控制修正PID的比例、積分和微分三個參數,這樣就可以保證系統在不同狀況下都處于最優狀態,從而提高了系統控制精度、有較好的實時性與魯棒性。如圖2所示為設計的液壓位置伺服模糊 PID控制系統方框圖。
3. 模糊PID控制
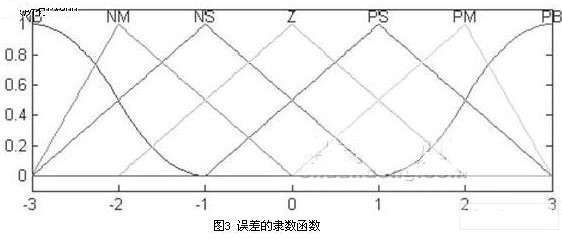
本文使用模糊控制方法實現對PID參數的在線調整,模糊控制的輸入為誤差 和誤差變化率 ,輸出為PID三個參數的調整量△kp 、△ki和△kd。根據液壓位置伺服系統設定 的基本論域為[0.6,0.6], 的基本論域為[0.3,0.3],其對應模糊論域均取為{-3,-2,-1,0,1,2,3},故量化因子 現取誤差e和誤差變化率ec的模糊集E, EC={NB,NM,NS,Z,PB,PM,PB},且其隸屬度函數均如圖3所示:
模糊控制的輸出△kp 、△ki和△kd的模糊論域分別為{-3,-2,-1,0,1,2,3}、{-0.06,
-0.04,-0.02,0,0.02,0.04,0.06}、{-0.3,-0.2,-0.1,0,0.1,0.2,0.3},并且其模糊集均為{NB,NM,NS,Z,PB,PM,PB}。三個輸出變量的隸屬函數同輸入誤差 和誤差變化率 相同,都用三角函數,在此不一一列出。
在對精確量進行模糊化后,根據各量的模糊集和隸屬函數,采用MAX-MIN模糊推理可以分別推導出模糊輸出變量△kp 、△ki和△kd的模糊規則表,其中很重要的一點是必須根據理論知識和工程經驗考慮PID三個參數的作用及相互間的關系。
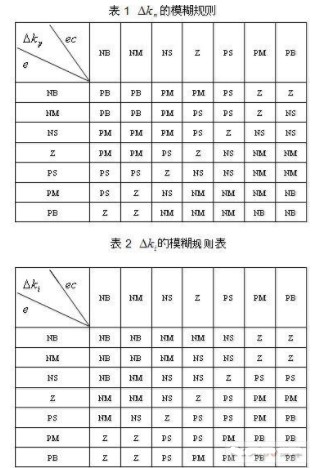
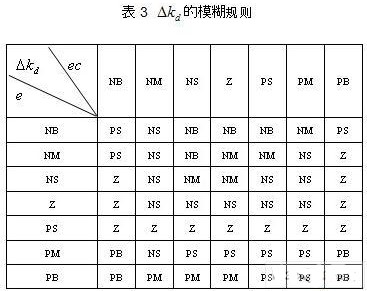
根據表1、2、3的模糊規則推理出的模糊輸出量,通過反模糊化即可得到PID三參數的實際精確量,從而實現對PID的在線調整。為實現更好的模糊控制效果,本文使用取中位數的反模糊化方法。

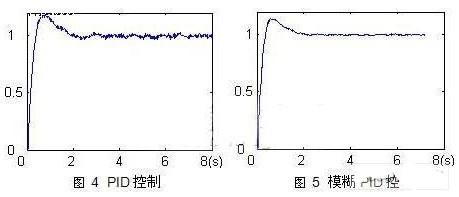
控制與模糊PID控制的階越響應仿真模型,并加入幅值為1的白噪聲干擾來仿真模型的時變。仿真波形如下圖:
5. 結論
仿真結果顯示,PID設定參數相同的情況下,加入模糊控制實時修正PID的參數,可以更好的控制被控對象。由圖4、圖5可以看到,PID參數一旦固定,在時變狀況下的適用性受到很大制約,而模糊PID通過在線自調整參數,使控制性能一直保持在最優狀態下,有更好的控制精度和魯棒性。此外,在調整模糊控制參數時,應特別重視量化因子與比例因子的作用。
-
放大器
+關注
關注
143文章
13584瀏覽量
213368 -
PID
+關注
關注
35文章
1472瀏覽量
85483 -
功率
+關注
關注
14文章
2066瀏覽量
69859
發布評論請先 登錄
相關推薦



基于帶修正因子模糊PID控制的PMSM交流伺服系統

模糊PID控制對伺服系統性能改善的研究





 工商網監
工商網監
評論