") 機器視覺定位下的工業(yè)機器人系統(tǒng)設(shè)計
機器視覺定位下的工業(yè)機器人系統(tǒng)設(shè)計
引言
目前工業(yè)機器人僅能在嚴格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動作,缺乏對環(huán)境的感知與應(yīng)變能力,這極大地限制了機器人的應(yīng)用。利用機器人的視覺控制,不需要預(yù)先對工業(yè)機器人的運動軌跡進行示教或離線編程,可節(jié)約大量的編程時間,提高生產(chǎn)效率和加工質(zhì)量。
Hagger 等人提出通過基于機器人末端與目標物體之間的誤差進行視覺反饋的方法;Mezouar 等人提出通過圖像空間的路徑規(guī)劃和基于圖像的控制方法 。國內(nèi)這方面主要應(yīng)用于焊接機器人對焊縫的跟蹤。
本文利用基于位置的視覺伺服思想,以六自由度垂直關(guān)節(jié)型噴涂機器人為載體,提出一種基于機器視覺的工業(yè)機器人自定位控制方法,解決了機器人末端實際位置與期望位置相距較遠的問題,改善了噴涂機器人的定位精度。
1. 視覺定位系統(tǒng)的組成
機器人視覺定位系統(tǒng)構(gòu)成如圖 1 所示,在關(guān)節(jié)型機器人末端安裝噴涂工具、單個攝像機,使工件能完全出現(xiàn)在攝像機的圖像中。系統(tǒng)包括攝像機系統(tǒng)和控制系統(tǒng):
(1)攝像機系統(tǒng):由單個攝像機和計算機(包括圖像采集卡)組成,負責(zé)視覺圖像的采集和機器視覺算法;
(2)控制系統(tǒng):由計算機和控制箱組成,用來控制機器人末端的實際位置;經(jīng) CCD 攝像機對工作區(qū)進行拍攝,計算機通過本文使用的圖像識別方法,提取跟蹤特征,進行數(shù)據(jù)識別和計算,通過逆運動學(xué)求解得到機器人各關(guān)節(jié)位置誤差值,最后控制高精度的末端執(zhí)行機構(gòu),調(diào)整機器人的位姿。
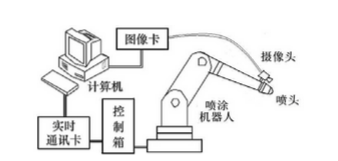
圖1 噴涂機器人視覺定位系統(tǒng)組成
2. 視覺定位系統(tǒng)工作原理
2.1 視覺定位系統(tǒng)的工作原理
使用 CCD 攝像機和1394 系列采集卡,將視頻信號輸入計算機,并對其快速處理。首先選取被跟蹤物體的局部圖像,該步驟相當(dāng)于離線學(xué)習(xí)的過程,在圖像中建立坐標系以及訓(xùn)練系統(tǒng)尋找跟蹤物。學(xué)習(xí)結(jié)束后,圖像卡不停地采集圖像,提取跟蹤特征,進行數(shù)據(jù)識別和計算,通過逆運動學(xué)求解得到機器人各關(guān)節(jié)位置給定值,最后控制高精度的末端執(zhí)行機構(gòu),調(diào)整機器人的位姿。工作流程如圖2 所示。
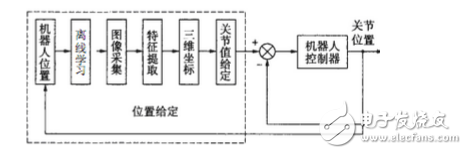
圖 2 視覺定位系統(tǒng)軟件流程圖
2.2 基于區(qū)域的匹配
本文采用的就是基于區(qū)域的相關(guān)匹配方法。它是把一幅圖像中的某一點的灰度領(lǐng)域作為模板,在另一幅圖像中搜索具有相同(或相似)灰度值分布的對應(yīng)點領(lǐng)域,從而實現(xiàn)兩幅圖像的匹配。在基于區(qū)域相關(guān)的算法中,要匹配的元素是固定尺寸的圖像窗口,相似準則是兩幅圖像中窗口間的相關(guān)性度量。當(dāng)搜索區(qū)域中的元素使相似性準則最大化時,則認為元素是匹配的。
定義P (i, j) P 是模板圖像中一點,取以P (i, j) P 為中心的某一鄰域作為相關(guān)窗口K ,大小為(2w +1),假設(shè)K 在原始圖中,水平方向平移Δu ,垂直方向平移Δu 后,K 所覆蓋下的那塊搜索區(qū)域叫做子圖S k ,若K 和S k 相同,則它們的差為零,否則不為零。由此定義K 和S k 的相關(guān)函數(shù)為:
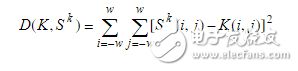
當(dāng)D(K, S k )達到最小,K 與S k 達到最佳匹配。
2.3 圖像的特征提取
工作臺上的工件與工作臺背景在顏色方面具有很大的差別,即工件呈現(xiàn)為黑色,將這一信息作為識別工件的重要特征。
工件的邊緣處灰度有急劇的變化,可以以此判斷出工件的邊界點。采用掃描線的方法,掃描方向上灰度劇變的像素點就是邊界點。最后,通過最小二乘法把找到的邊界點擬合出圓周,并計算出圓心位置。
2.4 實驗與分析
實驗?zāi)康氖峭ㄟ^機器視覺,快速識別出工件的特征(這里是圓孔的圓心)。
(1)首先在原始圖像(圖3)選取被跟蹤工件的局部圖像作為模板圖像template(圖4)。
(2)以局部圖像template 為模板,在原始圖像中進行基于區(qū)域的匹配,并以template 的左
下角為原點,建立坐標系。然后定義一個搜索區(qū)域ROI(region of interest),根據(jù)要提取的特征選擇區(qū)域的形狀,這里選擇環(huán)形區(qū)域。搜索區(qū)域必須包含全部目標特征。在ROI 中提取工件的特征,如圖3 所示。

圖 3 圓心識別
該步驟相當(dāng)于離線學(xué)習(xí)的過程。每次使用前只需要學(xué)習(xí)一次即可。通過離線學(xué)習(xí),系統(tǒng)得到ROI 與工件的相對位置關(guān)系,以便實時識別中工件出現(xiàn)偏移、翻轉(zhuǎn)等,ROI 都可以準確出現(xiàn)在合適位置。
(3)離線學(xué)習(xí)后,視覺系統(tǒng)經(jīng)過區(qū)域匹配、閥值分割和邊緣提取等步驟找到需要識別的特征(這里是圓孔的圓點),如圖4 所示。

圖4 實時識別
(3)離線學(xué)習(xí)后,視覺系統(tǒng)經(jīng)過區(qū)域匹配、閥值分割和邊緣提取等步驟找到需要識別的特征(這里是圓孔的圓點),如圖4 所示。
2.5 結(jié)果分析如下:
(1)識別率分析:第一步通過離線學(xué)習(xí),訓(xùn)練提取形狀特征。第二步使用離線學(xué)習(xí)得到的坐標關(guān)系,實時跟蹤工件,得到需要跟蹤的形狀特征信息。只要離線學(xué)習(xí)恰當(dāng),目標特征就準確識別并且得到相關(guān)信息。
(2)實時處理結(jié)果分析:圖像采集卡的采集速度是25 幀/s,每幅圖采集時間為40ms。攝像頭采集一幅圖像需要20ms,該圖像處理的速度為10ms/幅。通過程序優(yōu)化,在采集的同時進行圖像處理,而且圖像處理的速度比采集的時間要短,就避免了圖像的失真和抖動。在物體運動不超過極限速度時,能夠較準確地找到圓心的位置。
3. 空間坐標的獲取
由一幅圖像得到的信息是二維信息,程序中使用的坐標是以像素為單位的,機器人在空間運動需要將圖像的信息換算成三維空間坐標。其計算過程如下:
(1)以工件上圓孔的圓心為機器人定位基準,A(X ,Y, Z)圓心的世界坐標。當(dāng)圓心與視覺圖像的中心重合時,機器人定位完成。
(2)標定攝像機,得到投影矩陣ce M ,即圖像中兩個像素間的距離與世界坐標系的轉(zhuǎn)換關(guān)系。
(3)攝像機拍攝圖像后,經(jīng)過特征識別得到圓心在圖像中坐標a(x, y),計算出與圖像中心的偏移量Δx、Δy。
(4)以A(X ,Y, Z)為基準,按照下式計算機器人末端的世界坐標B(X ‘,Y ’, Z‘):其中,Mc是攝像機與機器人末端的坐標轉(zhuǎn)換參數(shù)。
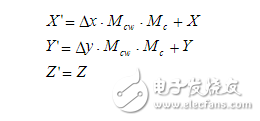
注意,本文使用單目視覺,所以這里假設(shè) Z 坐標不變;如果使用雙目視覺,就可以通過立體視覺計算出Z’。
4. 誤差分析與補償
本項目的噴涂機器人是六自由度的旋轉(zhuǎn)關(guān)節(jié)操作臂,與Unimation PUMA560相似,關(guān)節(jié)4、5、6 的軸線相互垂直,且相交與一點。應(yīng)用參考文獻3 的方法計算如下:
(1)通過機器視覺可以得到機器人末端的空間位置坐標B(X ’,Y ‘, Z’)。
(2)確定機器人的連桿參數(shù)表,如下表:

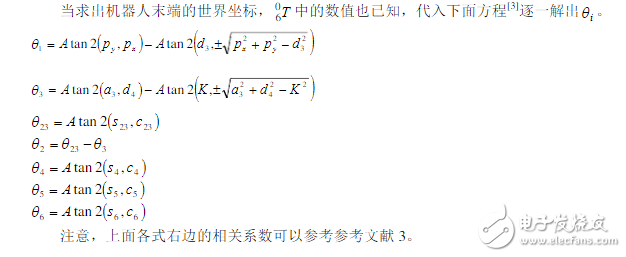
(3)運用DH 法計算各關(guān)節(jié)的轉(zhuǎn)角θi :
結(jié)論
本文描述了基于機器視覺的工業(yè)機器人定位系統(tǒng),該系統(tǒng)將基于區(qū)域的匹配和形狀特征識別結(jié)合,進行數(shù)據(jù)識別和計算,能夠快速準確地識別出物體特征的邊界與質(zhì)心,機器人控制系統(tǒng)通過逆運動學(xué)求解得到機器人各關(guān)節(jié)位置的轉(zhuǎn)角誤差,最后控制高精度的末端執(zhí)行機構(gòu),調(diào)整機器人的位姿以消除此誤差。從而解決了機器人末端實際位置與期望位置相距較遠的問題,改善了噴涂機器人的定位精度。該方法計算量小,定位準確,具有工程實用性。本系統(tǒng)是使用 C#在Visual Studio 2003 環(huán)境中編寫。
-
工業(yè)機器人
+關(guān)注
關(guān)注
91文章
3373瀏覽量
92787 -
視覺定位
+關(guān)注
關(guān)注
5文章
53瀏覽量
12415
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論