


引言
步進電機由于具有轉子慣量低、定位精度高、無累積誤差、控制簡單等特點,已成為運動控制領域的主要執行元件之一。步進電機是機電一體化的關鍵產品,廣泛應用在各種自動化控制系統和機電一體化設備中。隨著微電子和計算機技術的發展,步進電機的需求量與日俱增,在各個行業的控制領域都將有廣泛應用。PLC 作為一種工業控制計算機,具有模塊化結構、配置靈活、高速的處理速度、精確的數據處理能力、PLC 對步進電機也具有良好的控制能力,利用其高速脈沖輸出功能或運動控制功能,即可實現對步進電機的控制。
對于那些在運行過程中移動距離和速度均確定的具體設備,采用PLC 通過驅動器來控制步進電機的運轉是一種理想的技術方案。本例介紹PLC 控制步進電機的方法。
1 工作原理及特性
步進電動機是一種用電脈沖信號進行控制,并將電脈沖信號轉換成相應的角位移或線位移的執行機構。由于受脈沖的控制,其轉子的角位移量和速度嚴格地與輸入脈沖的數量和脈沖頻率成正比,通過控制脈沖數量來控制角位移量,從而達到準確定位的目的;通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的;通過改變通電順序,從而達到改變電機旋轉方向的目的。步進電機的種類很多,按結構可以分為反應式、永磁式及混合式步進電機三類,按相數分則可以分為單相、兩相和多相三種。
1.1 步進電機的特點
(1)步進電機的角位移與輸入脈沖數嚴格成正比,電機運轉一周后沒有累積誤差,具有良好的跟隨性。
(2)由步進電機與驅動器電路組成的開環數字控制系統,既非常簡單、廉價,又非常可靠。同時,它也可以與角度反饋環節組成高性能的閉環數字控制系統。
(3)步進電機的動態響應快,易于啟停、正反轉及變速。
(4)速度可在相當寬的范圍內平滑調節,低速下仍能保證獲得大轉矩。
(5)步進電機只能通過脈沖電源供電才能運行,它不能直接使用交流電源和直流電源。
1.2 控制原則
步進電機能響應而不失步的最高步進頻率稱為“啟動頻率”;與此類似,“停止頻率”是指系統控制信號突然關斷,步進電機不沖過目標位置的最高步進頻率。而電機的啟動頻率、停止頻率和輸出轉矩都要和負載的轉動慣量相適應。有了這些數據,就能有效地對步進電機進行變速控制。
采用PLC 控制步進電機,應根據下式計算系統的脈沖當量、脈沖頻率上限和最大脈沖數量,進而選擇PLC 及其相應的功能模塊。根據脈沖頻率可以確定PLC 高速脈沖輸出時需要的頻率,根據脈沖數量可以確定PLC 的位寬。脈沖當量=(步進電機步距角×螺距)/(360×傳動速比);脈沖頻率上限=(移動速度×步進電機細分數)/脈沖當量;最大脈沖數量=(移動距離×步進電機細分數)/脈沖當量。
2 PLC 實現步進電機單雙軸運動的控制
2.1 控制坐標系的建立
PLC 對步進電機的控制首先要確立坐標系,可以設為相對坐標系,也可以設為絕對坐標系。坐標系的設置在DM6629 字中,00—03 位對應脈沖輸出0,04—07 位對應脈沖輸出1。設置為0時,為相對坐標系;設置為1 時,為絕對坐標系。
2.1.1 對于不帶加減速的單相脈沖輸出
當PLC 控制坐標系設定為相對坐標系時,可以從端口0 和端口1 以增量的形式輸出脈沖,輸出脈沖的計數值,對于端口0記錄在SR229、SR228 通道,對于端口1 記錄在SR231、SR230 通道中。
如設輸出脈沖數為00000100 時從端口輸出100 個脈沖,脈沖計數值從0 計到100,之后還可以繼續從該端口輸出脈沖,即可以增量輸出脈沖。每次輸出脈沖時,脈沖計數值從0 開始重新計數,計滿設定值為止。
當設為絕對坐標系時,輸出脈沖數可以設置為正數,如00000100(相當于電機正向轉動100 步),也可以設置為負數,如80000100(最高位為“1”表示負數,相當于電機反向轉動100 步)。但由于是單相脈沖輸出,須另外加方向控制信號,可以用01002等輸出端做方向信號輸出。
在絕對坐標系中,坐標值記錄在SR229、SR228 通道(端口0)和SR231、SR230 通道中(端口1)。每次輸出脈沖數是脈沖設置值和當前坐標值的差,如當前坐標值為0,設置輸出值為00000100,輸出100 個脈沖(正向輸出信號有效),再設置輸出值為00000100,不再輸出脈沖,再設置輸出值為80000100,再輸出200 個脈沖(反向輸出信號有效),坐標值由00000100 變為80000100。
2.1.2 對于帶加減速的兩相脈沖輸出
當設置為相對坐標系時,也可以實現增量脈沖輸出。由于兩相脈沖輸出可以直接控制電機正反向,所以脈沖輸出值可以設置為正數,也可以設置為負數,輸出脈沖的計數值記錄在SR229、SR228 通道(端口0)中。如設置輸出脈沖數為00000100,電機正向運轉100 步,脈沖計數值從00000000 計到00000100,再設置輸出脈沖數為80000100,電機反向運轉100 步,脈沖計數值從80000000 計到80000100。
當設置為絕對坐標系時,坐標值記錄在SR229、SR228 通道(端口0)中,坐標變化情況類似于單相脈沖輸出,但正/反向脈沖輸出或脈沖十方向輸出由01000 和01001 兩個端口配合完成。
2.2 單軸運行控制
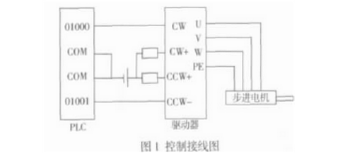
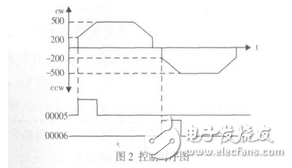
帶加減速的單軸正反轉控制,帶加減速單軸正反轉運控制的控制接線及時序,如圖1,圖2 所示。圖1 中用兩相脈沖輸出CW/CCW 方式進行控制。
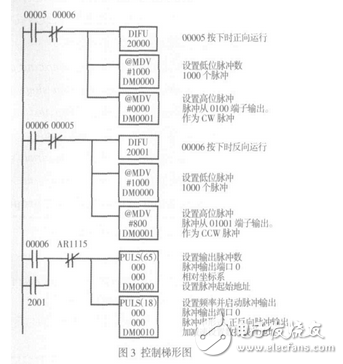
用兩相脈沖輸出CW/CCW 方式進行控制,PLC 的控制程序,如圖3 所示,梯形圖中設定參數有:
DM0010 值為0001,對應加減速率為10HZ/10ms
DM0011 值為0050,對應目標頻率為500HZ
DM0012 值為0020,對應啟動頻率為200HZ
2.3 雙軸運行控制
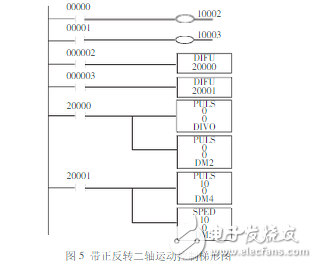
2.3.1 帶正反向的二軸運動控制
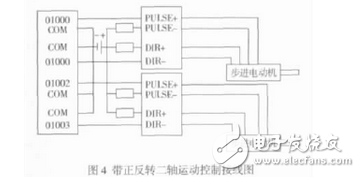
雙軸運動控制使用一臺PLC 控制兩個驅動器,驅動兩個步進電動機的運動。帶正反向二軸運動控制的接線,如圖4 所示。
PLC 的控制程序,如圖5 所示,梯形圖中01002 和01003 為ON 時電機順時針轉動,為OFF 時電機逆時針轉動。
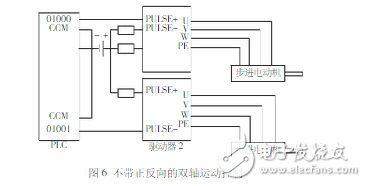
2.3.2 不帶正反向的二軸運動控制
不帶正反向的雙軸運動控制的接線的接線圖,當有脈沖輸出時,電機逆時針轉動。這種方式和方式1 的差別就是不用01002和01003 作方向控制,如圖6 所示。
結論
通過PLC 來實現步進電機的單雙軸運動控制的設計,從而達到了PLC 在步進電動控制中應用更加廣泛。例如,在對單雙軸運動的控制過程中,在控制面板上設定移動距離、速度和方向等參數。PLC 讀入這些設定值后,通過運算產生脈沖、方向信號,控制步進電動機驅動,達到對距離、速度、方向控制的目的。并通過實測證明系統運行結果具有可靠性、可行性、有效性。
-
plc
+關注
關注
5036文章
13887瀏覽量
473931 -
步進電機
+關注
關注
152文章
3165瀏覽量
149585
發布評論請先 登錄
基于串口的6軸步進伺服電機控制
TMC5072-LA雙軸步進電機驅動芯片雙軸編碼器接口
PLC與步進電機的運動控制詳解
S7-200、變頻器與觸摸屏的應用PLC與步進電機的運動控制實例說明
基于臺達PLC的步進電機控制<續一>

plc如何控制步進電機的速度和方向?
plc如何控制步進電機的速度和方向?

中空軸步進電機概述






 工商網監
工商網監

評論