") 簡(jiǎn)介伺服系統(tǒng)
簡(jiǎn)介伺服系統(tǒng)
1. 對(duì)伺服系統(tǒng)的基本要求
(1)穩(wěn)定性好:穩(wěn)定是指系統(tǒng)在給定輸入或外界干擾作用下,能在短暫的調(diào)節(jié)過程后到達(dá)新的或者回復(fù)到原有平衡狀態(tài)。
(2)精度高:伺服系統(tǒng)的精度是指輸出量能跟隨輸入量的精確程度。作為精密加工的數(shù)控機(jī)床,要求的定位精度或輪廓加工精度通常都比較高,允許的偏差一般都在 0.01~0.00lmm之間。
(3)快速響應(yīng)性好:快速響應(yīng)性是伺服系統(tǒng)動(dòng)態(tài)品質(zhì)的標(biāo)志之一,即要求跟蹤指令信號(hào)的響應(yīng)要快,一方面要求過渡過程時(shí)間短,一般在200ms以內(nèi),甚至小于幾十毫秒;另一方面,為滿足超調(diào)要求,要求過渡過程的前沿陡,即上升率要大。
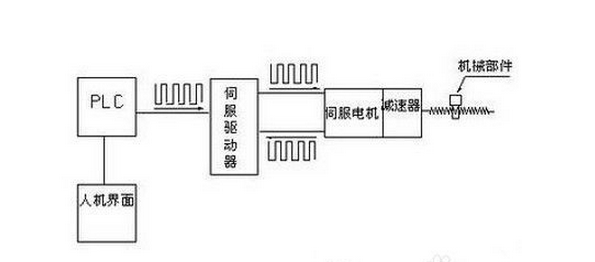
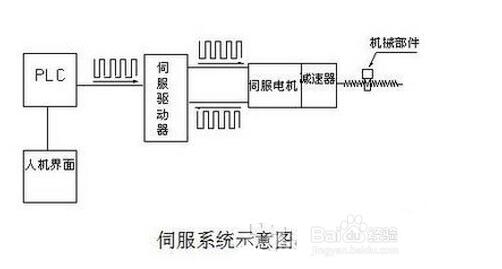
伺服系統(tǒng)示意圖
2. 伺服系統(tǒng)的主要特點(diǎn)
(1)精確的檢測(cè)裝置:以組成速度和位置閉環(huán)控制。
(2)有多種反饋比較原理與方法:根據(jù)檢測(cè)裝置實(shí)現(xiàn)信息反饋的原理不同,伺服系統(tǒng)反饋比較的方法也不相同。目前常用的有脈沖比較、相位比較和幅值比較3種。
(3)高性能的伺服電動(dòng)機(jī)(簡(jiǎn)稱伺服電機(jī)):用于高效和復(fù)雜型面加工的數(shù)控機(jī)床,伺服系統(tǒng)將經(jīng)常處于頻繁的啟動(dòng)和制動(dòng)過程中。要求電機(jī)的輸出力矩與轉(zhuǎn)動(dòng)慣量的比值大,以產(chǎn)生足夠大的加速或制動(dòng)力矩。要求伺服電機(jī)在低速時(shí)有足夠大的輸出力矩且運(yùn)轉(zhuǎn)平穩(wěn),以便在與機(jī)械運(yùn)動(dòng)部分連接中盡量減少中間環(huán)節(jié)。
(4)寬調(diào)速范圍的速度調(diào)節(jié)系統(tǒng),即速度伺服系統(tǒng):從系統(tǒng)的控制結(jié)構(gòu)看,數(shù)控機(jī)床的位置閉環(huán)系統(tǒng)可看作是位置調(diào)節(jié)為外環(huán)、速度調(diào)節(jié)為內(nèi)環(huán)的雙閉環(huán)自動(dòng)控制系統(tǒng),其內(nèi)部的實(shí)際工作過程是把位置控制輸入轉(zhuǎn)換成相應(yīng)的速度給定信號(hào)后,再通過調(diào)速系統(tǒng)驅(qū)動(dòng)伺服電機(jī),實(shí)現(xiàn)實(shí)際位移。數(shù)控機(jī)床的主運(yùn)動(dòng)要求調(diào)速性能也比較高,因此要求伺服系統(tǒng)為高性能的寬調(diào)速系統(tǒng)。
-
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2045瀏覽量
57815 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
572瀏覽量
39205 -
伺服驅(qū)動(dòng)器
+關(guān)注
關(guān)注
22文章
481瀏覽量
31544
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
數(shù)控機(jī)床的伺服系統(tǒng)
進(jìn)給伺服系統(tǒng)
伺服系統(tǒng)的PID控制
伺服系統(tǒng)介紹

伺服系統(tǒng)脈沖控制電路
伺服系統(tǒng)的PID控制技術(shù)下載
教學(xué)雷達(dá)伺服系統(tǒng)設(shè)計(jì)與制作
伺服系統(tǒng)是什么_伺服系統(tǒng)的基本要求_伺服系統(tǒng)的基本組成
伺服系統(tǒng)什么意思_伺服系統(tǒng)的作用是什么
伺服系統(tǒng)應(yīng)用于哪兒_伺服系統(tǒng)應(yīng)用實(shí)例
交流伺服系統(tǒng)的分類及應(yīng)用場(chǎng)合
機(jī)電伺服系統(tǒng)有哪些_機(jī)電伺服系統(tǒng)工作原理
伺服系統(tǒng)原理及分類

交流伺服系統(tǒng)的分類及應(yīng)用場(chǎng)合





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論