") 根據(jù)CAN總線的燃?xì)廨啓C(jī)監(jiān)測(cè)診斷系統(tǒng)
根據(jù)CAN總線的燃?xì)廨啓C(jī)監(jiān)測(cè)診斷系統(tǒng)
GTD一350燃?xì)廨啓C(jī)是國(guó)內(nèi)首次引進(jìn)的一個(gè)獨(dú)特設(shè)計(jì)、帶自由渦輪的航空燃?xì)鉁u輪發(fā)動(dòng)機(jī)。它是設(shè)計(jì)用作Mi2型輕量級(jí)直升飛機(jī)的動(dòng)力裝置。為了在實(shí)驗(yàn)室進(jìn)一步研究其作為聯(lián)合動(dòng)力裝置原動(dòng)機(jī)的動(dòng)態(tài)特性,設(shè)計(jì)遠(yuǎn)程監(jiān)測(cè)診斷系統(tǒng)是GTD一350燃機(jī)安全、可靠運(yùn)行的重要保證。遠(yuǎn)程故障診斷技術(shù)是在故障診斷技術(shù)、計(jì)算機(jī)技術(shù)和網(wǎng)絡(luò)通信技術(shù)發(fā)展的基礎(chǔ)上,由于工業(yè)過(guò)程對(duì)遠(yuǎn)程監(jiān)測(cè)與控制的急切需求而迅速發(fā)展起來(lái)的應(yīng)用技術(shù)。它通過(guò)工業(yè)局域網(wǎng)/廣域網(wǎng)把分布于各個(gè)局部現(xiàn)場(chǎng)、獨(dú)立完成特定功能的設(shè)備互聯(lián)起來(lái),以達(dá)到協(xié)同工作、集中監(jiān)測(cè)的目的,最大限度地發(fā)揮網(wǎng)絡(luò)的實(shí)時(shí)性和高效性來(lái)完成遠(yuǎn)程設(shè)備的監(jiān)測(cè)與故障診斷。
1 監(jiān)測(cè)診斷系統(tǒng)設(shè)計(jì)
1.1 監(jiān)測(cè)診斷系統(tǒng)的組成
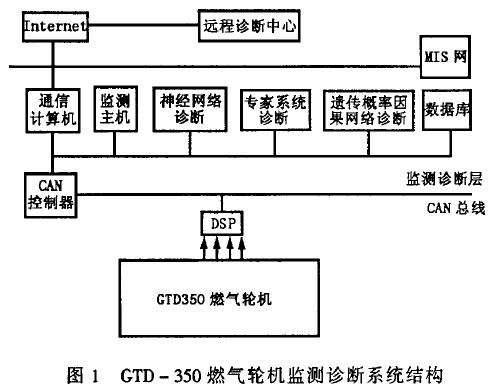
本文設(shè)計(jì)了一種簡(jiǎn)捷、可靠的基于CAN總線的燃?xì)廨啓C(jī)分布式監(jiān)測(cè)和故障診斷系統(tǒng),可以方便地調(diào)用各種故障診斷方法,實(shí)現(xiàn)燃?xì)廨啓C(jī)的狀態(tài)監(jiān)測(cè)和故障診斷。它主要由傳感器子系統(tǒng)、現(xiàn)場(chǎng)采集處理與監(jiān)測(cè)子系統(tǒng)、遠(yuǎn)程監(jiān)視子系統(tǒng)、分析診斷子系統(tǒng)和網(wǎng)絡(luò)子系統(tǒng)等部分組成。綜合了信號(hào)處理、人工智能、通信、DSP(Digital signal processing)、數(shù)據(jù)庫(kù)、計(jì)算機(jī)網(wǎng)絡(luò)等成熟的技術(shù),將一個(gè)完整的在線監(jiān)測(cè)和診斷任務(wù)分解到不同層的計(jì)算機(jī)上,相互配合,共同實(shí)現(xiàn)分布式的監(jiān)測(cè)過(guò)程。
1.1.1 遠(yuǎn)程監(jiān)視子系統(tǒng)
子系統(tǒng)在設(shè)備層,由多個(gè)以DSP為核心的嵌人式系統(tǒng)等智能采集處理單元組元。DSP具有高速數(shù)字信號(hào)處理能力,配合外圍的智能傳感器和濾波、放大、A/D轉(zhuǎn)換等采集處理電路,采集到燃?xì)廨啓C(jī)的各種在線狀態(tài)信號(hào),再經(jīng)過(guò)軟件濾波等預(yù)處理,可獲得需要的狀態(tài)原始數(shù)據(jù)。然后,根據(jù)相關(guān)監(jiān)測(cè)算法對(duì)這些數(shù)據(jù)加以處理,最終通過(guò)設(shè)備層的總線將數(shù)據(jù)上傳到監(jiān)測(cè)診斷層,而某個(gè)DSP監(jiān)測(cè)算法要從其他DSP子系統(tǒng)獲得相關(guān)數(shù)據(jù),需要各采集處理子系統(tǒng)之間能相互通信。采用CAN總線將各個(gè)現(xiàn)場(chǎng)采集與監(jiān)測(cè)子系統(tǒng)連接起來(lái),組成分布式的現(xiàn)場(chǎng)采集處理與監(jiān)測(cè)子系統(tǒng)。
1.1.2 傳感器及信號(hào)調(diào)理子系統(tǒng)
GTD350燃?xì)廨啓C(jī)信號(hào)調(diào)理子系統(tǒng)實(shí)現(xiàn)信號(hào)的隔離、放大、濾波、轉(zhuǎn)換等預(yù)處理,采用模塊化、總體式設(shè)計(jì)。由測(cè)速模塊,振動(dòng)信號(hào)濾波放大模塊,溫度信號(hào)放大模塊,壓力和流量信號(hào)直通模塊等模塊組成。各模塊實(shí)現(xiàn)專一的信號(hào)調(diào)理任務(wù),根據(jù)測(cè)試信號(hào)的不同,可以自由組合,實(shí)現(xiàn)信號(hào)調(diào)理硬件的組態(tài)化。
1.1.3 現(xiàn)場(chǎng)采集處理與監(jiān)測(cè)子系統(tǒng)
現(xiàn)場(chǎng)采集處理與監(jiān)測(cè)子系統(tǒng)由DSP、高速A/D數(shù)據(jù)采集卡和慢變信號(hào)A/D采集卡組成。轉(zhuǎn)速和振動(dòng)信號(hào)選用高速A/D同時(shí)對(duì)通道模擬信號(hào)進(jìn)行同步采樣;溫度、壓力、流量、用慢變信號(hào)AID采集卡采集。
現(xiàn)場(chǎng)采集監(jiān)測(cè)子系統(tǒng)實(shí)現(xiàn)數(shù)據(jù)采集、監(jiān)測(cè)、報(bào)警和數(shù)據(jù)存儲(chǔ)等功能。采集的數(shù)據(jù)通過(guò)局域網(wǎng)絡(luò)存儲(chǔ)在文件服務(wù)器,當(dāng)網(wǎng)絡(luò)中斷時(shí),數(shù)據(jù)存人本地磁盤,網(wǎng)絡(luò)恢復(fù)正常后由服務(wù)器調(diào)用。
1.1.4 分析診斷子系統(tǒng)和網(wǎng)絡(luò)子系統(tǒng)
在監(jiān)測(cè)診斷層,利用以太網(wǎng)將監(jiān)測(cè)主機(jī)、文件服務(wù)器、多個(gè)診斷控制計(jì)算機(jī)、數(shù)據(jù)庫(kù)等設(shè)備連接起來(lái)。分析診斷系統(tǒng)包含豐富的分析診斷軟件,實(shí)現(xiàn)故障的精密診斷、自動(dòng)診斷和趨勢(shì)報(bào)表分析。監(jiān)測(cè)主機(jī)通過(guò)通信計(jì)算機(jī)接收設(shè)備層采集的原始數(shù)據(jù)和處理后的數(shù)據(jù),可調(diào)用監(jiān)測(cè)界面模塊將其顯示出來(lái),并進(jìn)行及時(shí)的報(bào)警和常規(guī)的數(shù)據(jù)分析。
1.2 監(jiān)測(cè)診斷系統(tǒng)功能
現(xiàn)場(chǎng)采集處理與監(jiān)測(cè)子系統(tǒng)模塊:完成該系統(tǒng)的初始化,現(xiàn)場(chǎng)數(shù)據(jù)的采集和預(yù)處理,與CAN總線數(shù)據(jù)通信。
1.2.1 網(wǎng)絡(luò)通信模塊
通訊任務(wù)包括現(xiàn)場(chǎng)采集站定時(shí)將機(jī)組當(dāng)前運(yùn)行參數(shù)發(fā)送到工程師站。工程師站將控制、采集等運(yùn)行參數(shù)設(shè)置命令發(fā)送至數(shù)據(jù)采集站。
工程師站與MIS系統(tǒng)的通訊采用服務(wù)器把MIS、工程師連接起來(lái),可用Windows NT命名管道傳送實(shí)時(shí)數(shù)據(jù),使MIS站上的工程師可以監(jiān)視燃?xì)廨啓C(jī)的各種狀態(tài)。遠(yuǎn)程網(wǎng)絡(luò)連接將MIS通過(guò)Web服務(wù)器建立Intemet連接,可以使現(xiàn)場(chǎng)工程師和診斷中心專家進(jìn)行在線交流,及時(shí)掌握更多的信息,由專家提供診斷結(jié)論和治理措施,再將這些結(jié)論通過(guò)對(duì)話服務(wù)發(fā)送給現(xiàn)場(chǎng)工程師。
1.2.2 數(shù)據(jù)庫(kù)模塊
數(shù)據(jù)庫(kù)模塊的設(shè)計(jì)應(yīng)采用分散和集中相結(jié)合的原則,可以將數(shù)據(jù)庫(kù)模塊分成兩部分:
數(shù)據(jù)采集站的數(shù)據(jù)庫(kù)和診斷中心數(shù)據(jù)庫(kù)。數(shù)據(jù)采集站的數(shù)據(jù)庫(kù)設(shè)計(jì)原則是設(shè)計(jì)實(shí)時(shí)數(shù)據(jù)庫(kù),包括振動(dòng)的各種特征參數(shù)、波形數(shù)據(jù)、頻譜數(shù)據(jù)、溫度、壓力、轉(zhuǎn)速等。實(shí)時(shí)數(shù)據(jù)庫(kù)采用單鏈表數(shù)據(jù)結(jié)構(gòu)設(shè)計(jì)。診斷中心的數(shù)據(jù)庫(kù)按照不同的診斷建立相應(yīng)的實(shí)時(shí)、歷史數(shù)據(jù)庫(kù),歷史數(shù)據(jù)庫(kù)采用大型數(shù)據(jù)庫(kù)管理系統(tǒng)。
實(shí)時(shí)數(shù)據(jù)庫(kù)接收客戶端實(shí)時(shí)發(fā)送的數(shù)據(jù),實(shí)現(xiàn)遠(yuǎn)程監(jiān)測(cè)。而歷史數(shù)據(jù)庫(kù)則主要收集一些與故障相關(guān)的特征數(shù)據(jù),主要包括:機(jī)組啟停、升降速、增減負(fù)荷時(shí)的狀態(tài)參數(shù),異常工況下的狀態(tài)參數(shù)、部分正常工況下的狀態(tài)參數(shù)、機(jī)組其他重要的狀態(tài)參數(shù)和運(yùn)行參數(shù)。
1.2.3 服務(wù)程序模塊
它是遠(yuǎn)程診斷中心的重要組成部分。現(xiàn)場(chǎng)工程師和遠(yuǎn)端專家通過(guò)它對(duì)狀態(tài)數(shù)據(jù)進(jìn)行分析處理,從而進(jìn)行故障診斷和制定故障治理策略。實(shí)時(shí)數(shù)據(jù)顯示分析包括參數(shù)設(shè)置、穩(wěn)態(tài)和瞬態(tài)監(jiān)測(cè)。系統(tǒng)參數(shù)對(duì)在線監(jiān)測(cè)診斷系統(tǒng)的精度有著重要的影響,不能隨意修改,為此給不同級(jí)別的用戶設(shè)定了不同的權(quán)限。穩(wěn)態(tài)監(jiān)測(cè)主要是在機(jī)組不間斷運(yùn)行時(shí)使用,可采用列表的方式顯示各種狀態(tài)參數(shù),并且可以繪制各種圖形,有多種反映振動(dòng)征兆的圖形化方法,從實(shí)時(shí)數(shù)據(jù)庫(kù)讀出數(shù)據(jù)然后繪制對(duì)應(yīng)的圖形,如振動(dòng)波形圖、振動(dòng)頻譜、升降速波德圖、振型圖、軸心軌跡圖等,專家能夠選擇其想查看的圖形,從而進(jìn)行經(jīng)驗(yàn)上的判斷。瞬態(tài)監(jiān)測(cè)主要實(shí)現(xiàn)隨機(jī)監(jiān)測(cè)和啟停機(jī)監(jiān)測(cè),可根據(jù)需要設(shè)置采樣頻率、采樣長(zhǎng)度、數(shù)據(jù)的存盤方式等,可供分析診斷軟件包等檢索調(diào)用。故障診斷服務(wù)主要包括方法、模糊理論、神經(jīng)網(wǎng)絡(luò)、遺傳算法與概率因果網(wǎng)絡(luò)相結(jié)合理論等建立的各種診斷程序。
2 GTD一350燃機(jī)智能故障診斷方法
2.1 基于規(guī)則的專家系統(tǒng)診斷方法
基于規(guī)則的方法又稱產(chǎn)生式方法,早期的故障診斷專家系統(tǒng)都是基于規(guī)則的,這些規(guī)則是從專家的經(jīng)驗(yàn)中總結(jié)出來(lái),用來(lái)描述故障和征兆的關(guān)系。
該方法的優(yōu)點(diǎn)是知識(shí)表示簡(jiǎn)單、直觀、形象、方便,使用直接的知識(shí)表示和相對(duì)簡(jiǎn)單的啟發(fā)式知識(shí),診斷推理速度快;要求數(shù)據(jù)的存儲(chǔ)空間相對(duì)較小;易于編程和開(kāi)發(fā)出快速原型系統(tǒng)。缺點(diǎn)是知識(shí)庫(kù)覆蓋的故障模式有限,對(duì)未出現(xiàn)過(guò)的和經(jīng)驗(yàn)不足的故障診斷就顯得無(wú)能為力;當(dāng)知識(shí)庫(kù)中沒(méi)有相應(yīng)的與征兆匹配的規(guī)則時(shí),易造成誤診或診斷失敗。
2.2 基于神經(jīng)網(wǎng)絡(luò)的診斷方法
從映射的角度分析,故障診斷的實(shí)質(zhì)是建立從征兆到故障源的映射過(guò)程。人工神經(jīng)網(wǎng)絡(luò)的優(yōu)點(diǎn)是高度非線性、高度容錯(cuò)和聯(lián)想記憶等。但是,人工神經(jīng)網(wǎng)絡(luò)應(yīng)用于故障診斷也存在許多不足,診斷方法屬“黑箱”方法,不能揭示出系統(tǒng)內(nèi)部的一些潛在關(guān)系,無(wú)法對(duì)診斷過(guò)程給予明確解釋。網(wǎng)絡(luò)訓(xùn)練時(shí)間較長(zhǎng),并且對(duì)未在訓(xùn)練樣本中出現(xiàn)的故障無(wú)診斷能力,甚至得出錯(cuò)誤診斷結(jié)論,這些都增加了神經(jīng)網(wǎng)絡(luò)在實(shí)際應(yīng)用中的困難。
2.3 基于遺傳算法與概率因果網(wǎng)絡(luò)結(jié)合的故障診斷方法
概率因果模型用于汽輪發(fā)電機(jī)組故障診斷時(shí),具有最大似然值的故障集一定是最可能發(fā)生的故障,通過(guò)尋找使似然值函數(shù)最大的故障集合就可將故障診斷問(wèn)題轉(zhuǎn)化為非線性全局最優(yōu)化問(wèn)題。但各種故障的組合是一個(gè)相當(dāng)大的搜索空間,用數(shù)學(xué)解析或?qū)嶒?yàn)的方法幾乎不能求解。而遺傳算法具有高度并行性和求解非線性問(wèn)題的能力,可把遺傳算法與概率因果模型相結(jié)合,將由概率因果模型得到的似然值函數(shù)作為遺傳算法的適應(yīng)值函數(shù),在全局范圍內(nèi)搜索最有可能發(fā)生的故障集合。概率因果模型與遣傳算法相結(jié)合時(shí),染色體串采用二進(jìn)制編碼形式,故障出現(xiàn)為1,未出現(xiàn)為0。適應(yīng)值函數(shù)由下式表示:

式中:D表示可能的故障組合,也就是染色體串中為1所對(duì)應(yīng)的故障;M 表示已知存在的征兆;M代表所有的征兆集;P代表第i種故障所對(duì)應(yīng)的先驗(yàn)概率;c代表第i種故障與第,種征兆之間的因果強(qiáng)度,亦即第i種故障引起第7種征兆發(fā)生的可能性大小。
2.4 混合智能故障診斷方法
根據(jù)不同的發(fā)動(dòng)機(jī)系統(tǒng)參數(shù),結(jié)合智能故障診斷方法的特點(diǎn)采用多種方法的診斷系統(tǒng)稱為混合診斷方法。具體智能診斷方法的選用原則根據(jù)發(fā)動(dòng)機(jī)各系統(tǒng)故障的征兆以及故障狀態(tài)下的歷史數(shù)據(jù)來(lái)決定。本研究中GTD一350燃機(jī)油路系統(tǒng)故障采用專家系統(tǒng),根據(jù)系統(tǒng)振動(dòng)檢測(cè)參數(shù)采用神經(jīng)網(wǎng)絡(luò)。
結(jié)語(yǔ)
本文對(duì)GTD一350型燃?xì)廨啓C(jī)建立了地面遠(yuǎn)程監(jiān)測(cè)與診斷系統(tǒng)。此系統(tǒng)的研究是集數(shù)據(jù)采集、性能分析、故障診斷、人工智能等技術(shù)于一體的綜合信息處理系統(tǒng),實(shí)現(xiàn)了對(duì)GTD一350燃?xì)廨啓C(jī)運(yùn)行狀態(tài)的監(jiān)測(cè)和故障診斷。通過(guò)與Intemet的連接,實(shí)現(xiàn)了遠(yuǎn)程監(jiān)測(cè)和診斷。非現(xiàn)場(chǎng)運(yùn)行人員可以直接登陸相關(guān)的遠(yuǎn)程診斷中心的網(wǎng)站進(jìn)行分析診斷,可提高實(shí)時(shí)處理效率和分析診斷的準(zhǔn)確性,為運(yùn)行人員和設(shè)備管理工程師提供了設(shè)備運(yùn)行狀況的科學(xué)依據(jù),以便及時(shí)發(fā)現(xiàn)異常情況,保證設(shè)備安全可靠經(jīng)濟(jì)運(yùn)行。
-
發(fā)動(dòng)機(jī)
+關(guān)注
關(guān)注
33文章
2473瀏覽量
69277 -
CAN總線
+關(guān)注
關(guān)注
145文章
1950瀏覽量
130734 -
燃?xì)廨啓C(jī)
+關(guān)注
關(guān)注
1文章
36瀏覽量
11386
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
什么是微型燃?xì)廨啓C(jī)發(fā)電系統(tǒng)?其有哪些優(yōu)點(diǎn)?
微型燃?xì)廨啓C(jī)是什么
LabVIEW在燃?xì)廨啓C(jī)發(fā)電機(jī)組勵(lì)磁控制系統(tǒng)測(cè)試中的應(yīng)用
燃?xì)廨啓C(jī)發(fā)電設(shè)備可靠性評(píng)價(jià)規(guī)程
彼爾姆發(fā)動(dòng)機(jī)制造聯(lián)合體的燃?xì)廨啓C(jī)技術(shù)
燃?xì)廨啓C(jī)及其在石油化工領(lǐng)域的應(yīng)用
聯(lián)合循環(huán)燃?xì)廨啓C(jī)發(fā)電廠簡(jiǎn)介
燃?xì)廨啓C(jī)的概述及其原理和結(jié)構(gòu)介紹
基于指數(shù)積分算法的微型燃?xì)廨啓C(jī)發(fā)電系統(tǒng)仿真方法
燃?xì)廨啓C(jī)調(diào)速系統(tǒng)建模
基于LabVIEW的船用燃?xì)廨啓C(jī)數(shù)字控制器軟件設(shè)計(jì)
某燃?xì)廨啓C(jī)半物理仿真試驗(yàn)平臺(tái)的研制與調(diào)試
成功案例 I Opra Turbines:燃?xì)廨啓C(jī)的氣體擴(kuò)散分析和防爆措施

燃?xì)廨啓C(jī)的原理及結(jié)構(gòu)技術(shù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論