 SCARA機器人處于直線運動狀態的算法求解研究
SCARA機器人處于直線運動狀態的算法求解研究
1. 引 言
SCARA機器人是一種四軸機械手,SCARA(Selective Compliance Assembly Robot Arm,中文譯名:選擇順應性裝配機器手臂)是一種圓柱坐標型的特殊類型的工業機器人。 SCARA系統在x,y方向上具有順從性,而在Z軸方向具有良好的剛度,此特性特別適合于裝配工作,例如將一個圓頭針插入一個圓孔,故SCARA系統首先大量用于裝配印刷電路板和電子零部件;SCARA的另一個特點是其串接的兩桿結構,類似人的手臂,可以伸進有限空間中作業然后收回,適合于搬動和取放物件,如集成電路板等。 它的第一、二、四軸具有轉動特性,而第三軸具有線性移動特性,故其工作空間類似于一個扇形柱體區域。SCARA機器人還廣泛應用于塑料工業、汽車工業、電子產品工業、藥品工業和食品工業等領域
SCARA機器人是專門為工業要求而開發的機器人系統,適合在平面范圍內實現對物體的快速取放或者裝配等。控制系統硬件平臺采用四軸運動控制器與交流伺服驅動系統,結構緊湊,可靠性高 諧波減速傳動 控制系統軟件平臺采用OpenRob-I工業機器人平臺軟件,機器人語言編程系統全面開放,提供源代碼,方便應用軟件的二次開發,用戶可根據需要進行機器人專用系統的開發 工業標準設計,可同時兼顧教學和實訓當SCARA機器人在流水線上進行往復運動時,其末端點經常會處于直線運動狀態。由于末端位置與工作空間會隨實際工況的要求而發生變化,預先確定末端在直線運動下的極限點坐標,并提前設定軟件限位,對于防止過度驅動或錯誤操作下的機器人碰撞與損壞。
2. 算法設計
假定SCARA機器人的基座安裝在水平面內,依照從基座到末端的順序,將其四個軸分別命名為X、Y、Z、R軸,且將R軸末端視為一個點(設為End),若在R軸末端安裝夾具,則將夾具末端也視為一個點(設為Tip)。
2.1 前提條件
本算法的實現基于如下三個客觀前提條件:
(1) 由于Z軸僅在豎直平面內做上下運動,并不會影響End點的水平面投影位置。而在不安裝夾具的情況下,R軸的旋轉運動也不會對此產生影響;再者,由于夾具沒有附帶對應的驅動裝置,即使安裝夾具也僅相當于將End點的水平面投影點在二維空間內相對平移了一個固定的矢量位置,擴展了一定的工作空間范圍,所以,Z軸和R軸的運動都不會影響到末端點的水平面投影位置。
(2) 由于SCARA機器人的工作空間是一個類似于扇形的柱體區域,將其投影在水平面上并不會使工作空間的邊界發生改變。所以,End點的直線運動是否超出工作空間的范圍僅與X、Y兩軸的運動有關。
(3) 由于End點(或Tip點)在水平面二維空間下的直線運動有無窮多種可能的方向,而每種方向均與x-y直角坐標軸成一定角度,經旋轉變換后都能歸結到與坐標軸平行的方向上。所以,本算法只針對分別平行于x-y直角坐標軸的兩種直線運動求解四個極限點坐標即可,其余運動方向上的極限點坐標可參照本算法旋轉相應角度后求解。
2.2 設計過程
設基座位于x-y直角坐標系的原點O,SCARA機器人的大、小臂均完全展開時的姿態與x軸正向重合,為初始狀態,規定兩臂旋轉的方向均取逆時針為正,順時針為負,據此建立幾何學模型。先由四條平面圓弧(設為C1~C4)確定水平面工作空間,同時給定末端當前點(設為Now)的坐標;再過點Now分別作兩條坐標軸的平行線(設平行于x軸的直線為Line_H、平行于y軸的直線為Line_V),與邊界圓弧相交;然后分別求出Line_H、Line_V與C1~C4的8個交點,若無交點則默認交點坐標為點Now的坐標值;接著判斷交點中的有效點;最后確定出四個極限點(設為P1~P4)的位置坐標即為所求。
2.3 交點判定
從上述設計過程可知,所求的左、右極限點必然在Line_H與圓弧邊界的交點之中,而上、下極限點必然在Line_V與圓弧邊界的交點之中。點a稱為集合E的極限點,如果a的任意鄰域都與E有交集。因為SCARA機器人在做直線運動時不會更換手系,所以可將左、右手系分開考慮。
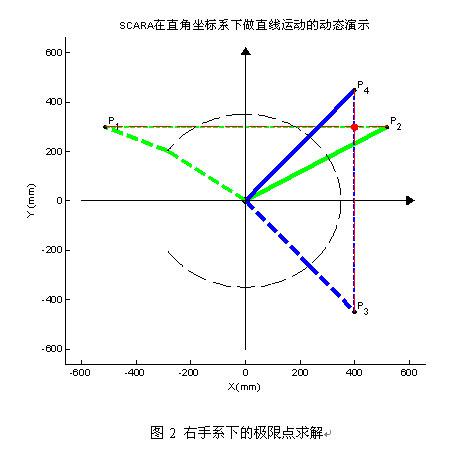
在右手系下,圓弧C1~C4依次首尾相連圍成一個封閉區域,如圖1所示。其中,C1弧為小臂處于正向最大姿態且大臂自由運動時End點的軌跡,C2弧為小臂始終處于大臂的延長線上且大臂自由運動時End點的軌跡,C3弧為大臂處于正向最大姿態且小臂自由運動時End點的軌跡,C4弧為大臂處于負向最小姿態且小臂自由運動時End點的軌跡。Now點位于這個封閉區域內,P1~P4點的判定遵循如下原則:(1) P1、P2、P3、P4分別位于Now點的左、右、下、上方;(2) 各極限點在各自方位上均與Now點的直線距離最短;(3) 線段P1P2、P3P4均不穿過C1弧與坐標原點O圍成的工作死區。
左手系與右手系類似,不再敖述。
3. 仿真與實現
本文采用MATLAB仿真與VC實現相對應驗證的方式對算法加以說明。MATLAB是矩陣實驗室(Matrix Laboratory)的簡稱,是美國MathWorks公司出品的商業數學軟件,用于算法開發、數據可視化、數據分析以及數值計算的高級技術計算語言和交互式環境,主要包括MATLAB和Simulink兩大部分。MATLAB是由美國mathworks公司發布的主要面對科學計算、可視化以及交互式程序設計的高科技計算環境。它將數值分析、矩陣計算、科學數據可視化以及非線性動態系統的建模和仿真等諸多強大功能集成在一個易于使用的視窗環境中,為科學研究、工程設計以及必須進行有效數值計算的眾多科學領域提供了一種全面的解決方案,并在很大程度上擺脫了傳統非交互式程序設計語言(如C、Fortran)的編輯模式,代表了當今國際科學計算軟件的先進水平。
3.1 MATLAB仿真
3.1.1 右手系

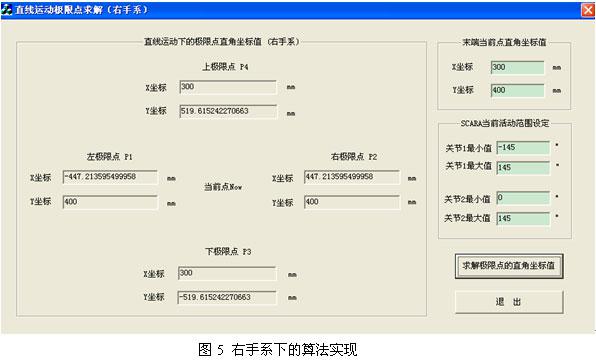
設最大工作空間取值范圍如下:X軸為 ,Y軸為 ,當前末端點位置坐標為 ,最終所求的右手系下的4個極限點P1、P2、P3、P4的直角坐標值為(如圖2所示):
3.1.2 左手系
左手系下的實現過程與右手系類似,如圖3、圖4所示。不同的只是Y軸的工作空間取值范圍為 ,當前末端點位置坐標仍然取為 ,最終所求的左手系下的4個極限點P1、P2、P3、P4的直角坐標值為(如圖4所示):
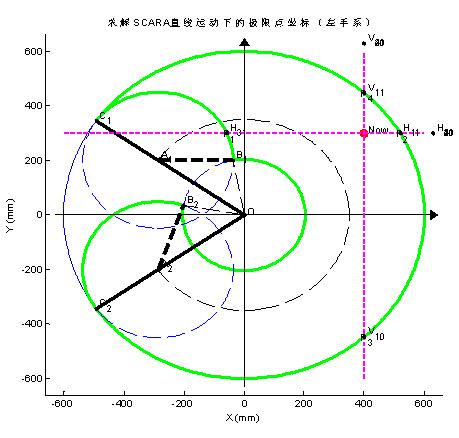
圖3 左手系下的工作空間與當前點
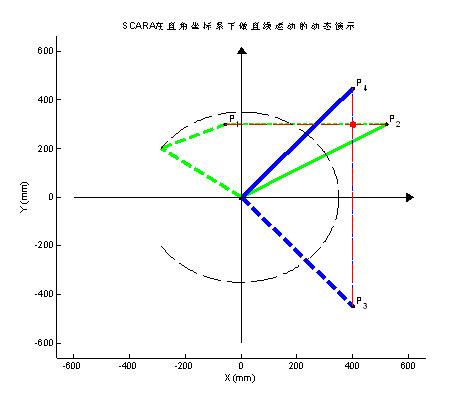
圖4 左手系下的極限點求解
需要說明的是,上述仿真示例只是給出了最大工作空間,在該工作空間內可選取任意子空間及包含其中的當前末端點進行仿真,仿真結果均表明,本算法能正確計算并確定SCARA機器人末端直線運動下的四個極限點坐標。
3.2 VC實現
采用VC開發軟件封裝功能函數,實現本算法。右、左手系下的界面分別如圖5、圖6所示。選取與上節MATLAB仿真示例中相同的工作空間與末端當前位置坐標等參數,求解出的四個極限點坐標與MATLAB結果完全對應相同。
3.2.1 右手系
3.2.2 左手系
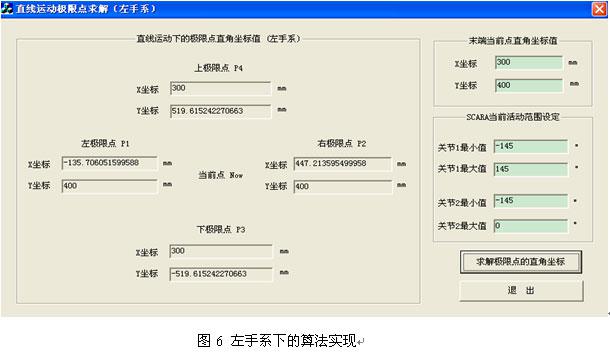
圖6 左手系下的算法實現
4. 結 論
本文提出了一種SCARA機器人直線運動極限點的求解算法,并通過MATLAB仿真與VC實現進行了對應驗證。該算法能有效預測并解決實際操作中的安全問題,具有較強的實用價值。SCARA機器人)是應用最廣泛的一種裝配機器人。本文設計的SCARA機器人既可以用于實際生產又可以用于教學實驗和科學研究。所以開發SCARA機器人具有廣泛的實際意義和應用前景。
-
matlab
+關注
關注
185文章
2977瀏覽量
230573 -
控制系統
+關注
關注
41文章
6628瀏覽量
110647 -
機器人
+關注
關注
211文章
28466瀏覽量
207309
發布評論請先 登錄
相關推薦
基于CAN總線和雙傳感器仿人機器人運動控制系統的研究
SCARA工業機器人相關資料推薦
全向輪機器人是怎樣進行直線運動的?
直線電機是如何做到直線運動的呢?






 工商網監
工商網監
評論