

1.引言
隨著高性能永磁材料、大規(guī)模集成電路和電力電子技術(shù)的發(fā)展,永磁同步電機(jī)因?yàn)槠涔β拭芏雀撸w積小,功率因數(shù)和高效率而得到發(fā)展,且引起了國內(nèi)外研究學(xué)者的關(guān)注。傳統(tǒng)的控制方式由于引入了位置傳感器而給當(dāng)前的調(diào)速系統(tǒng)帶來了一系列的問題:占據(jù)了比較大的有效空間,使系統(tǒng)編程復(fù)雜。因此無位置傳感器控制系統(tǒng)的研究變得越發(fā)的重要。
2.PMSM的坐標(biāo)系和數(shù)學(xué)模型
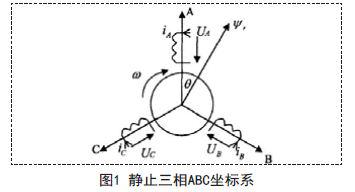
永磁同步電機(jī)在定子三相(ABC)靜止坐標(biāo)系下的電壓方程:
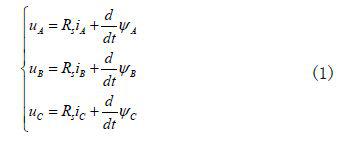
式中,三相繞組的相電壓瞬時(shí)值分別為A u 、B u 、C u ; A i 、B i 、C i 是相電流的瞬時(shí)值; s R 是永磁同步電機(jī)定子的每相繞組電阻; A ψ 、B ψ 、C ψ 是永磁體的磁鏈在各相繞組的投影。在d-q旋轉(zhuǎn)坐標(biāo)系下的電磁轉(zhuǎn)矩方程為:

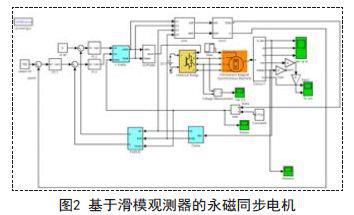
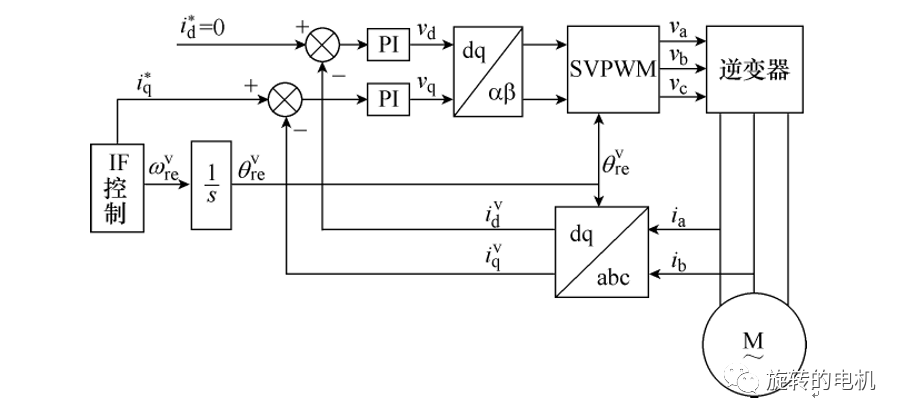
永磁同步電機(jī)無傳感器矢量控制的系統(tǒng)結(jié)構(gòu)框圖,在MATLAB/Simulink下建立PMSM驅(qū)動(dòng)仿真分析,用id=0時(shí)的無傳感器矢量控制系統(tǒng)的仿真模型如圖2所示,各個(gè)模塊介紹如下:給定的參考轉(zhuǎn)速是700rpm;速度通過PI調(diào)節(jié)模塊,實(shí)現(xiàn)轉(zhuǎn)速的閉環(huán)控制策略,該調(diào)節(jié)采用了輸出限幅;接著是電流PI調(diào)節(jié)器模塊構(gòu)成電流的閉環(huán)控制,輸出了定子的電壓dq軸分量ud和uq;I-park逆變器模塊將兩相旋轉(zhuǎn)直角坐標(biāo)系(dq)下的值向兩相靜止坐標(biāo)系(αβ)下變化,它的輸出是αβ軸的定子電壓分量參考值Ualfa,Ubeta;SVPWM和逆變模塊用于實(shí)現(xiàn)參考電壓逆變及其調(diào)制,從而可以直接通給電機(jī);PMSM是永磁同步電機(jī)模塊,負(fù)載轉(zhuǎn)矩是模塊Tm.反饋通道模塊有:
Clark變換模塊:實(shí)現(xiàn)三相坐標(biāo)系(ABC)向兩相直接坐標(biāo)系(αβ)的轉(zhuǎn)換,輸出的αβ坐標(biāo)系下的電流值和電壓值作為觀測器的輸入,其中SMO模塊是反電動(dòng)勢估算模塊,SMO1是轉(zhuǎn)速和轉(zhuǎn)角估算模塊,這兩點(diǎn)是討論的關(guān)鍵問題所在。
3.1 滑膜觀測器模塊
由滑膜觀測器的理論可以構(gòu)造滑膜觀測器:由觀測器和控制驅(qū)動(dòng)器構(gòu)成的物理模型如下:
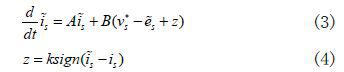
控制系數(shù)z的目標(biāo)是使電流的估計(jì)誤差接近0.通過合適的選擇系數(shù)k和正確的估算反電動(dòng)勢。在這里標(biāo)志? 表示變量是估算的。標(biāo)志*表示這個(gè)量可以獲得。
離散化后的公式:
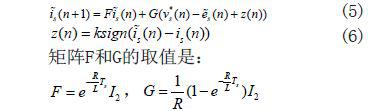
這里Ts是采樣周期。
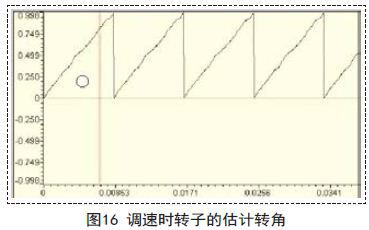
電機(jī)的角度估算值和反電動(dòng)勢之間的關(guān)系是:

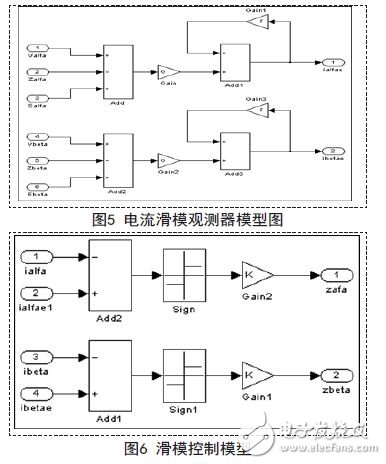
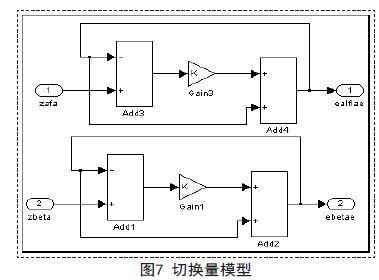
轉(zhuǎn)子角度的計(jì)算步驟為:電流觀測器(圖4示意圖),滑模控制(圖5到圖7示意圖),以及反電動(dòng)勢的計(jì)算圖。
滑膜觀測器構(gòu)成原理圖和框圖分別是:
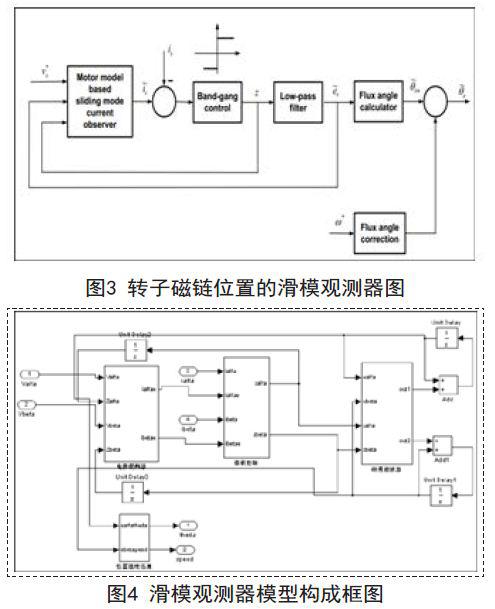
計(jì)算步驟是:電流觀測器,滑模控制,以及反電動(dòng)勢的計(jì)算圖。
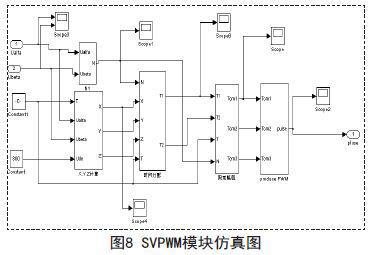
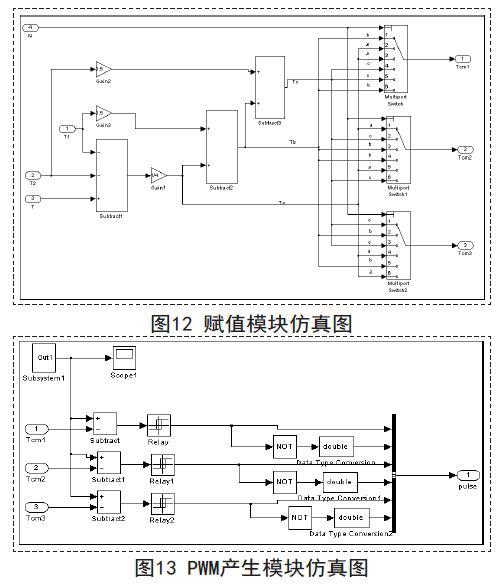
3.2 空間矢量脈寬調(diào)制(SVPWM)
主要包括通過逆變器確定矢量所在的扇區(qū),合成矢量分解到相鄰扇區(qū)的作用時(shí)間,計(jì)算電壓空間矢量的切換點(diǎn)。
(1)判斷矢量所在的扇區(qū):
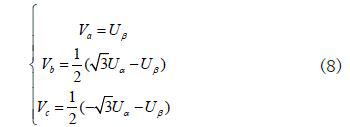
如果Va>0,則A=1否則A=0;如果Vb>0,則B=1否則B=0;如果Vc>0,則C=1否則C=0.
扇區(qū)計(jì)算公式為:


4.實(shí)驗(yàn)結(jié)果
永磁同步電機(jī)的定子相電阻是0.195684ohm,轉(zhuǎn)動(dòng)慣量是0.704905kg.m2,極對數(shù)是12對極,額定轉(zhuǎn)矩是160N.m,額定轉(zhuǎn)速是700rpm,以下是永磁同步電機(jī)滑模控制系統(tǒng)的仿真結(jié)果。
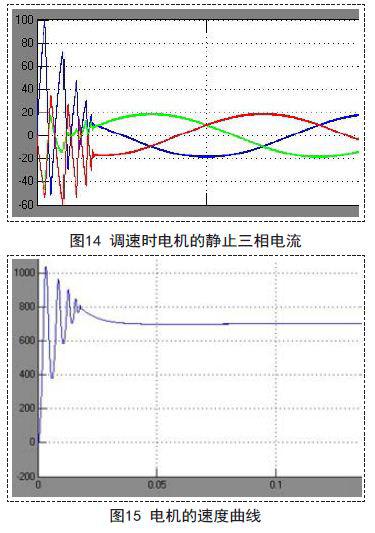
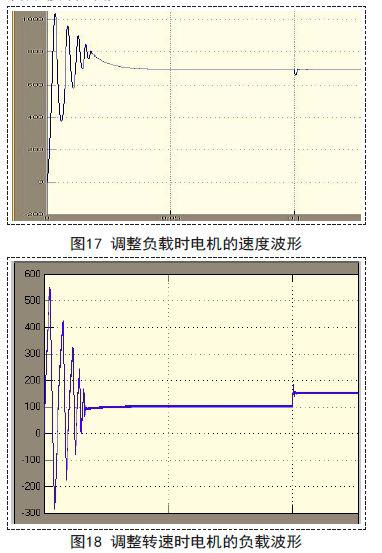
負(fù)載突變時(shí)對調(diào)速系統(tǒng)的影響,結(jié)果分析:在仿真模型中,負(fù)載轉(zhuǎn)矩給定值是100N.m,在0.1s秒時(shí)增加到160N.m,通過以下仿真圖來分析變化的負(fù)載轉(zhuǎn)矩對系統(tǒng)影響。圖4.22是永磁同步電機(jī)在負(fù)載突變情況下的轉(zhuǎn)速波動(dòng)圖,從仿真圖形可以看出電機(jī)控制經(jīng)過短時(shí)間的振動(dòng),進(jìn)入穩(wěn)定的運(yùn)行狀態(tài)且轉(zhuǎn)速穩(wěn)定在700rad/s,轉(zhuǎn)速?zèng)]受到負(fù)載轉(zhuǎn)矩波動(dòng)的影響。
5.實(shí)驗(yàn)結(jié)果與分析
本文析了永磁同步電機(jī)狀態(tài)方程,設(shè)計(jì)了滑模仿真器,并進(jìn)行了坐標(biāo)變換,通過MATLAB/Simulink進(jìn)行了模型的仿真和調(diào)速,仿真的結(jié)果表明該種控制方式是有效的,能夠估算出轉(zhuǎn)子位置信息極該種滑模控制是穩(wěn)定而且有效的,最后分析了負(fù)載轉(zhuǎn)矩?cái)_動(dòng)和系統(tǒng)參數(shù)變化對滑模控制性能的影響。結(jié)果說明基于滑模控制的永磁同步電機(jī)無傳感器控制系統(tǒng)具有很強(qiáng)的魯棒性,并且使用場合廣泛。
-
傳感器
+關(guān)注
關(guān)注
2561文章
52343瀏覽量
762541 -
永磁同步電機(jī)
+關(guān)注
關(guān)注
28文章
876瀏覽量
50217 -
仿真
+關(guān)注
關(guān)注
51文章
4222瀏覽量
135186
發(fā)布評論請先 登錄
在Matlab/Simulink中進(jìn)行永磁同步電機(jī)流頻比I/F控制系統(tǒng)的仿真分析
太實(shí)用!永磁同步電機(jī)控制方案及MATLAB仿真模型大全
永磁同步電機(jī)模型預(yù)測控制Simulink仿真教程資料下載
永磁同步電機(jī)電機(jī)本體數(shù)學(xué)模型在MATLAB下的仿真
Simulink永磁同步電機(jī)控制仿真系列
永磁同步電機(jī)控制原理及MATLAB仿真
建立永磁同步電機(jī)的數(shù)學(xué)模型
同步電機(jī)模型的matlab仿真
如何對永磁同步電機(jī)PMSM控制進(jìn)行Matlab仿真
基于Matlab/Simulink的永磁同步電機(jī)(PMSM)
現(xiàn)代永磁同步電機(jī)控制原理及MATLAB仿真源碼/模型
永磁同步電機(jī)最小損耗控制Simulink仿真

永磁同步電機(jī)恒壓頻比開環(huán)控制系統(tǒng)Matlab/Simulink仿真分析(一)
永磁同步電機(jī)FOC控制的基本原理及Matlab/Simulink仿真分析
永磁同步電機(jī)流頻比I/F控制原理及Matlab/Simulink仿真分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論