 基于單片機和觸控模塊的3D無線射頻鼠標的設計與實現
基于單片機和觸控模塊的3D無線射頻鼠標的設計與實現
引言
鼠標作為電腦的一基本部件。扮演著重要的角色。隨著科技的進步和市場的需求。鼠標也經歷著快速的發展。傳統的鼠標無論是有線鼠標還是無線鼠標。由于采用控制原理的原因,或者受到線纜的約束,或者離不開對桌面等載體的依賴,適用場合和范圍受到限制。因此,市場上急需一種適用于多種場合。能滿足不同人群特殊功能需求的鼠標,此時。3D無線鼠標的概念應運而生。本文通過對運用MEMS加速度傳感器。觸控模塊和凌陽單片機完成鼠標3D控制原理的闡述。以及對實驗中實際操作的記錄為現階段多功能新型鼠標的制作提供參考依據。
1 3D無線鼠標的工作原理
無線射頻鼠標總體分為發射模塊(見圖1)和接收模塊(見圖2)兩個部分。發射部分模塊集成在手持端,由使用者控制。接收模塊與PC、筆記本等儀器相連。
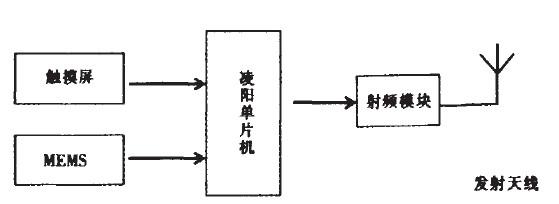
圖1 發射模塊系統框圖
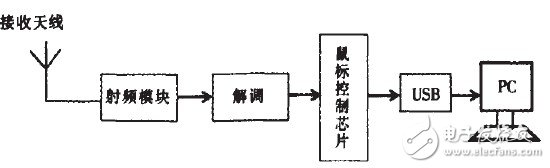
圖2接收模塊系統框圖
發射模塊主要由電阻式觸摸屏、MEMS加速度傳感器、16位凌陽單片機和nRF2401發射模塊組成,主要功能是實現對手勢運動趨勢信息的采集和發送。其中觸摸屏用于檢測使用時坐標X、Y的變化,通過對X、Y變化趨勢的分析,完成對鼠標移動軌跡的模擬。MEMS加速度傳感器則用于感知使用者的動作,通過將這些動作定義為特殊指令。實現鼠標的特殊功能鍵。同時發射模塊與接收模塊之間通過2.4GHz無線收發一體芯片完成兩者之問的無線通信。最終由接收端的USB驅動電路實現PC端的鼠標控制功能。
其中在通過對X、Y坐標變化,進行算法處理時,需要對操作過程中誤差較大的坐標進行濾波,同時簡化鼠標的移動方向。并通過固化匹配的方式,正確反映鼠標的整體的運動趨勢。從而更好的完成對手勢運動趨勢的分析,實現鼠標的準確定位。
在動作感應模塊方面。采用鴨C2046作為四線電阻式觸摸屏控制器。TSC2046以其低功耗和高速率等特性廣泛應用于電池供電的小型手持設備。它與觸摸屏連接的原理電路如圖3所示。另一方面。采用型號為MXR9550的MEMS加速度傳感器模塊。它的體積小、重量輕、功耗低、可靠性高、易于集成和實現智能化,其原理電路如圖4所示,利用它來感知人的動作,如揮手、擺臂等,然后可以將不同的動作定義為特殊的功能,如實現演講時PPT、PDF的翻頁,關閉窗口,切換窗口等動作。

圖3 TSC2046與觸摸屏連接的硬件原理圖
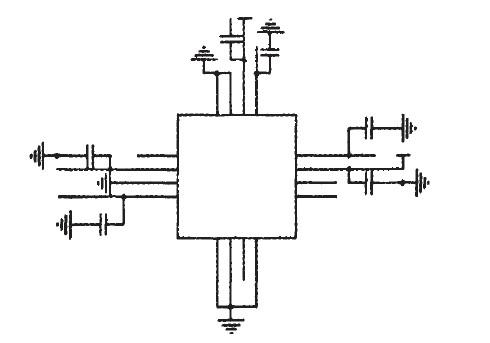
圖4 MEMS加速度傳感器原理電路
3系統流程設計
在發射端。當系統上電后,控制芯片會一直檢測觸摸屏和MEMS加速度傳感器的狀態。當滑動觸摸屏或是搖動鼠標時,系統就會收到數據,同時凌陽單片機通過對這些數據的處理。就能判斷出手指在觸摸屏上移動的軌跡和是否搖動了鼠標。然后將這些動作定義為不同的指令。通過無線模塊發射出去。程序流程如圖5所示。
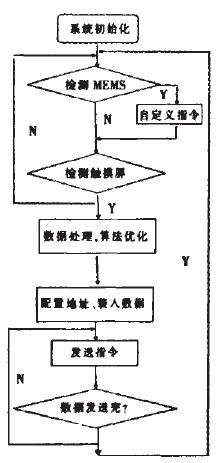
圖5手持端程序流程圖
在接收端,無線模塊始終等待捕捉發射信號。在接收成功后。控制芯片根據接收到的不同指令,通過USB接口電路傳送給電腦。完成鼠標動作。從而實現無線鼠標工作的整個過程。程序流程如圖6所示。
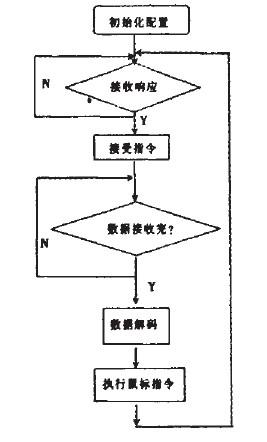
圖6接收端程序流程圖
4 鼠標手勢算法設計
由于每次采集的數據很多,其中有一小部分數據存在誤差,如果不將這些誤差數據過濾,肯定會影響鼠標的移動軌跡。如何得到準確的觸摸屏數據。是優化鼠標移動軌跡的關鍵。因此,在程序設計中。提出了一種優化鼠標移動軌跡的算法。其大致思路如以下:①過濾鼠標移動動作。如圖7(a)所示。這步將鼠標一連串移動動作中的小幅度波動動作給去掉,這一步是十分必要的;②限制鼠標移動方向,如圖7(b)所示。對于簡單的鼠標手勢支持,只支持上下左右4個方向。就把其他方向的動作都歸并到這4個方向中。一般就是比較一下上下方向和左右方向的差值,取大的那個作為最后的方向;③簡化移動方向序列,如圖7(c)所示。這步非常簡單,原本是右右上上右上上的方向序列,簡化后變成右上右上了;(多匹配動作序列,如圖7(d)所示。這步是最困難的,表面是把夾雜在長距離移動動作中的短距離動作過濾掉。實際的做法是先把整個動作序列與一組預定義的動作序列匹配比較,如果匹配失敗,就把這序列中最短幅度的動作過濾掉,再進行匹配,如此循環往復,直到最后匹配到為止。
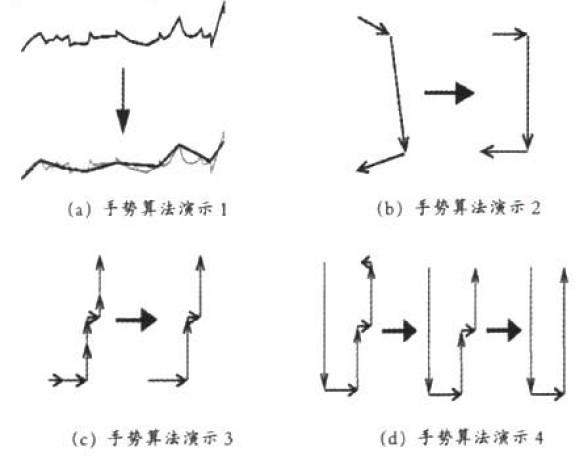
圖7 手勢算法演示
5結束語
本文闡述了一種3D無線射頻鼠標設汁的新思路,對傳統的鼠標不但進行了實現原理的創新,同時對其操作方式進行了補充,使鼠標真正擺脫對線纜與載體的依賴成為可能。隨著互聯網應用的發展,移動辦公的理念得到越來越多的支持,因此,本文設計的無線鼠標也能順應了移動辦公的潮流。
-
單片機
+關注
關注
6035文章
44554瀏覽量
634667 -
觸控
+關注
關注
9文章
224瀏覽量
71289 -
無線
+關注
關注
31文章
5450瀏覽量
173245
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論