 混合動力汽車電控系統的結構、功能及如何實現設計
混合動力汽車電控系統的結構、功能及如何實現設計
混合動力汽車是一種由內燃機和電動機混合驅動的汽車,其主要特點是節能、環保。這種汽車在起步時用電動機驅動,消除了內燃機起步時由于燃燒不充分而排黑煙的現象。在汽車減速或剎車時,利用發電機把動能轉化成電能,貯存到蓄電池中,實現能量回收達到節能的目的。由于這種汽車是內燃機和電動機兩種動力并存,僅用傳統的針對內燃機的電控系統無法實現兩種動力的最佳配合,因此開發混合動力車的全新電控系統是十分必要的。本文以一種電機并聯式混合動力汽車成功實現為背景,從系統角度介紹了混合動力汽車電控系統結構、功能及效果。
并聯式混合動力驅動結構簡介
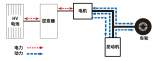
并聯式混合動力汽車的驅動系統結構見圖1。發動機通過機械傳動裝置與驅動橋連接,電動機通過動力復合裝置也與驅動橋相連,汽車可由發動機和電動機共同驅動或各自單獨驅動。并聯式混合動力電動汽車的結構形式更像是附加了一個電動機驅動系統的普通內燃機汽車。電動機起“調峰”作用:當汽車運行工況所需的功率超過了發動機的功率時,電動機從電池取得電能產生電磁力矩,并向驅動橋提供額外的驅動功率。有的并聯式混合動力電動汽車也有發電機,但其主要作用是向電池充電,以保持電池的荷電狀態(SOC)。

圖1并聯式混合驅動系統簡圖
電控系統結構設計
電控系統以國際業界先進的CAN總線作為通信媒介,以智能化的多能源管理單元為控制核心,以五個功能相對獨立的智能化節點(前艙傳感器單元、室內傳感器單元、電機驅動單元、電池管理單元及顯示單元)為輔助節點構成網絡控制系統。系統的結構框圖如圖2所示。多能源通過CAN總線獲得系統當前的狀態信息,并根據此狀態信息產生控制命令,亦通過總線將命令發送到發動機控制單元、電機驅動器使兩種動力相互配合,以發揮混合動力汽車節能和環保的目的。各單元(或稱節點)在本設計中的統一編號:N1為多能源控制單元;N2為電機驅動器單元;N3為前艙傳感器單元;N4為室內傳感器單元;N5為電池管理單元;N6為顯示單元。
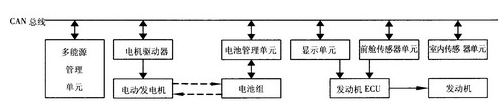
圖2電控系統結構圖1
1)多能源管理單元
是整個系統的指揮中心,它由性能較高的微處理器為核心,配合大容量的程序和數據存存器及總線接口構成,由此它能對從總線上傳來的系統信息進行迅速處理,大容量的數據存儲器中存放了系統運行最佳狀態參數,這樣處理器就能及時并精確按控制策略對電機和發動機兩種動力進行最佳配合。當電控系統出現故障時,它會及時對故障進行處理,保證系統的安全運行。
2)發動機控制單元
由微處理器、程序和數據存儲器、D/A轉換電路、開關量接口及總線接口構成。它的功能是通過總線接收多能源管理單元發出的對發動機的命令,進行判斷處理后通過模擬量輸出及開關量輸出對發動機進行控制,其中主要包括對發動機的空然比、點火系統等在各種工況下的控制。另外,本單元還會將執行情況及其當前狀況(正常狀態還是故障狀態)及時通過總線想多能源進行報告。
3)電機驅動控制單元
由微處理器、程序和數據存儲器、D/A轉換、開關量接口及電機調速控制幾部分構成。它的功能是通過總線接收多能源的對電機的控制命令并及時執行,它主要控制電機的發電與電動狀態的切換、電機的轉速及輸出力矩的控制,通過總線向多能源管理單元報告電機的狀態如轉速、充電電流、放電電流及故障等狀態,當電機出現故障時能進行自處理以保證車輛的安全運行。
4)數據采集單元
由處理器、微處理器、程序和數據存儲器、開關量接口、A/D轉換、頻率變換及總線接口構成。其功能是準確且及時檢測車輛系統的各參數如:發動機轉速、車速、節氣門開度、剎車、水溫、真空度、擋位、空調狀態、鑰匙狀態、離合器狀態等,并通過總線傳送給多能源管理單元,多能源管理單元以此作為決策依據。另外,此數據也作為顯示單元進行顯示的依據,因此,此單元是整個系統的眼睛。
5)電池管理單元
本混合動力車采用鋰電池組,此電池組由40個電池串聯而成,每個電池正常工作電壓為3.6V,為保證系統的安全及電池的可靠工作,對每個電池都配備一以功能較簡單微處理器為核心的控制器,每個控制器對其所管理的電池的電壓、容量、溫度參數進行檢測并通過485總線通知電池管理單元,同時控制器也對所管理的電池的充電及放電電流進行控制,防止電池過充和過放,以保證系統的安全。電池管理單元由較高級的微處理器和必要的外圍電路構成,本單元通過RS485總線與各電池的控制器進行通信,收集各電池的當前狀態參數(電壓、容量、溫度),并將這些信息進行處理后通過CAN總線通知多能源管理單元,同時也會將電池組的SOC傳送到顯示單元進行顯示。
6)顯示單元
顯示單元的構成與其他單元大同小異,它的功能是接收CAN總線上的信息,對必要的信息如車速、發動機 轉速、里程、電池容量、充電電流、放電電流、水溫、油量及系統故障代碼進行顯示,在顯示方式上,采用無可動部件的高精度數字顯示,增加了顯示信息量并提高了可靠性,同時為了滿足司機習慣于看指針式模擬儀表的要求,也采用類似指針運動的發光二極管模擬舊式表的顯示。
硬件設計
從N3、N4、N6三節點的功能要求來看,若按功能對硬件進行分別設計可各取所需,減小節點體積和重量,但是,這樣不便于系統功能的擴展,也限制了節點的可靠性和互換性,故采取三節點硬件統一設計的方案,即三節點的硬件完全一樣,各節點的硬件可互換,每個硬件包括所有三節點所需要的硬件功能,另外,由于現代電子技術的進步,統一設計和分別設計的硬件之間的體積和重量的差別很小,對系統性能的影響可以說是微乎其微,更重要的是這樣的設計為后續進一步改進所需的系統擴展和冗余式可靠性設計奠定了硬件基礎。
硬件系統(圖3)以微處理器CPU為核心以及必要的外圍電路構成。其中CPU為高性中央處理單元,具有豐富的功能和高速的處理能力,可快速進行大量的數學和邏輯運算,完全能滿足本電控系統的設計要求。程序存儲器中存放著實現各節點功能的軟件用以控制各節點的功能實現。數據儲存器電路用于系統內存擴展,復雜的程序控制和運算需要大量的中間變量和緩沖區,內存的擴展解決了這一問題.D/A轉換電路用于將處理后的數字信號轉換模擬信號輸出,主要應用于輸出控制和信號的遠程轉換,A/D轉換電路用于對系統的模擬量進行采集,即將被采集的模擬信號轉換為數字信號,所設計的轉換電路的轉換速度可達5微秒/路,分辨率為1/4096,每個節點可同時進行8路A/D轉換,完全可滿足任務書的技術要求。開關量輸出接口用于輸出節點的位控制命令,具有靈活的輸出控制,可直接或間接滿足各種功率輸出的控制要求,在本系統中的主要位控制信號有發動機的供油、空調、大小電機啟動選擇等信號。
開關量輸入電路用于采集系統的開關量,如:鑰匙開關信息、離合器狀態信息及空調狀態信息等信號。顯示接口電路用于將被顯示信號實時傳送到顯示器,顯示器采用數字化高亮度的LED顯示,提高了顯示的精度,同時又保留了原有儀表的模式,以便使用者有一個過渡的過程,不致產生不習慣的感覺。頻率變換電路用于將系統的速度信號(發動機轉速和車速)轉換為統一制式的脈沖信號以便微處理器進行識別和測速。CAN總線電路由總線控制器和收發控制電路構成,它負責接收和發送總線信息,使各節點通過總線相連接,使電控系統成為靈活的網絡控制系統。
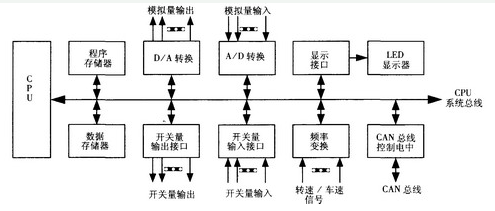
圖3硬件系統結構框圖
軟件設計
前艙傳感器節點(N3)的軟件設計
N3節點所要完成的任務為:1)實時檢測車速、轉速、節氣門、水溫、真空度的參數值;2)檢測本節點故障;3)按通信協議完成總線數據傳輸。本節點的多數任務要求有很高的實時性,因此本節點的軟件策略為:1)對車速、轉速及總線通訊采用中斷方式處理;2)定時啟動A/D轉換,為滿足任務要求的實時性,定時間隔為20μs,用以及時對節氣門、水溫、真空度的數字化測量;3)空閑時間查詢系統狀態,以檢測系統是否正常,若有故障,對故障進行相應的處理。這樣,即可以實時處理車速、轉速和通訊中斷又可使CPU處于多任務狀態,提高了系統資源的利用率。
室內傳感器節點(N4)的軟件設計
N4節點所要完成的任務為:1)實時檢測鑰匙開關狀態、離合器狀態、空調狀態及剎車的參數值;2)檢測本節點故障;3)按通信協議完成總線數據傳輸。本節點的軟件策略為:1)對鑰匙開關狀態、離合器狀態、空調狀態等開關量的檢測及總線通訊采用中斷方式處理;2)定時啟動A/D轉換,為滿足任務要求的實時性,定時間隔為20μs,用以及時對剎車信號的數字化測量;3)空閑時間查詢系統狀態,以檢測系統是否正常,若有故障,對故障進行相應的處理。
顯示節點(N6)的軟件設計
N6節點所要完成的任務為:1)對車速、里程、充電電流、放電電流及電池容量等參數進行實時顯示;2)及時完成大小電機的啟動控制和發動機的供油控制;3)檢測本節點故障;4)按通信協議完成總線數據傳輸。本節點的軟件策略為:1)對總線通訊、大小電機的啟動控制和發動機的供油控制采用中斷方式處理,以保證控制、通訊的及時性;2)定時刷新顯示,為滿足實時性,定時刷新時間間隔為20ms;3)空閑時間查詢系統狀態,以檢測系統是否正常,若有故障,對故障進行相應的處理。
通信機制設計
本車各單元之間大量數據傳送通過CAN總線來完成,這也是本混合動力電控系統的一個與眾不同的特色,由于CAN總線的使用,減輕了電控系統的線束重量,降低了系統的復雜性。另外,由于CAN總線是差分傳輸的一種抗干擾能力很強的現場總線,從而保證了系統通信的可靠性。
CAN總線簡介
CAN總線是德國Bosch公司20世紀80年代初為解決現代汽車中眾多的控制與測試儀器之間的數據交換而開發的一種串行數據通信協議。CAN已成為國際標準(ISO-11898),是具有國際標準的現場總線,規范2.0A和2.0B。CAN總線可支持8/16位CPU,可與各種處理器接口或組成智能化儀器儀表;可工作于多主工作方式,任一節點任一時刻均可主動發送信息,不分主從,通訊方式靈活,可方便的構成多機容錯系統;節點可分成不同優先級,滿足不同的實時要求;采用非破壞性總線仲裁技術,多點同時發送時,優先級低的節點,主動停止發送,優先級高的不受影響繼續發送,有效的避免了總線沖突;可采用點對點、一點對多點及全局廣播等方式傳送和接收數據,直接傳送距離達10km/5Kbps,速率最高達1Mbps/40m,總線上的節點數據理論值達2000個,實際由于時延可達110個;采用短幀結構每一幀有效字節8個,傳輸時間短,受干擾概率低,重新發送快;通訊介質可采用雙絞線及光纖;用戶接口簡單、編程方便;溫度-40℃~+125℃工作;節點故障時有自動關閉總線功能,可以與總線脫離,不影響總線操作;每幀具有CRC校驗和其它檢測措施,保證出錯率極低;具有很高的適應性;接口收發器具有瞬時電壓保護,RT抑制、熱保護、短路保護等。
通信協議
本系統在CAN2.0A協議基礎上定義通信協議。N1節點發出命令,N2~N6節點接受后不發確認信號,N1節點收到N2~N6節點的信息后判斷是否正確,如果不正確或在規定的時間內收不到N2~N6幀,則重新發命令,重發超過規定的次數為通訊故障;N2~N6幀發出信息,N1節點接受后,不發確認信息,N2~N6節點在規定的時間內收不到N1節點的命令,則為通訊故障;N6節點收到N1幀上電復位后的第一幀時在規定的時間內回答,在運行時若N6無故障,則不回答N1.節點數據幀基本結構定義如下:

系統中每個節點數據幀用ID區別,每個節點可定義多個不同的數據幀,用以傳送不同的信息。
性能分析
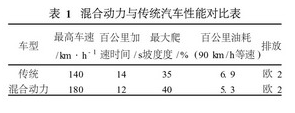
表1為混合動力汽車與傳統汽車性能對比,從測試參數來看混合動力汽車的動力和經濟性方面均比傳統汽車要優越,其排放也達到了“歐2”標準,而且通過測試可知,其尾氣中因不完全燃燒而產生的CO和NOx量要比傳統汽車要少。
結束語
提出了一種由智能節點和CAN總線通信網絡構成的混合動力汽車的電控系統,在國內混合動力車的控制系統中以CAN總線構成網絡控制系統,CAN總線良好的性能在此得到了驗證。從性能角度看,在電控系統優秀控制策略的控制下,混合動力汽車的發動機能最大限度工作在高效率和低排放的狀態下,同時也可將部分能量進行回收,達到了混合動力的節能和環保目的。另外,由于電機動力的加入也提高了汽車的動力性能。可以斷定,隨著電控系統技術的進一步發展,混合動力汽車必將成為綠色汽車產業的發展熱點。
責任編輯:gt
-
發動機
+關注
關注
33文章
2473瀏覽量
69267 -
汽車電子
+關注
關注
3026文章
7941瀏覽量
166910 -
電池
+關注
關注
84文章
10560瀏覽量
129471
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論