 采用模糊PID控制方法實現全自主移動機器人平臺的搭建
采用模糊PID控制方法實現全自主移動機器人平臺的搭建
引 言
移動機器人是一個集環境感知、動態決策、行為控制與執行等多種功能于一體的綜合系統,其運動控制是移動機器人領域的一個重要研究方向,也是移動機器人軌跡控制、定位和導航的基礎。傳統的運動控制常采用PID控制算法,其特點是算法簡單,魯棒性強,可靠性高,但需要精確的數學模型才對線性系統具有較好的控制效果,然而它對非線性系統的控制效果并不非常理想。模糊控制不要求控制對象的精確數學模型,因而靈活、適應性強。可是,任何一種純模糊控制器本質上是一種非線性PD控制,不具備積分作用,所以很難在模糊控制系統中消除穩態誤差。針對這個問題,采用模糊PID控制方法,將模糊控制器和傳統的PID控制相結合,使其既具有模糊控制靈活、適應性強的優點,又具有PID控制精度高的特點。
1、全方位移動機器人運動學分析
研究的是由第二炮兵工程學院自主研制的全自主移動機器人平臺——東風一Ⅱ型足球機器人。東風一Ⅱ型機器人采用了四輪全向移動的運動方式,具有全向運動能力的系統使機器人可以向任意方向做直線運動,而之前不需要做旋轉運動,并且這種輪系可滿足一邊做直線運動一邊旋轉的要求,以達到終狀態所需要的任意姿態角。全向輪系的應用將使足球機器人具有運動快速靈活,控球穩定,進攻性強,以及易于控制等優點,使機器人在賽場上更具競爭力。
1.1 全向輪
該機器人采用在大輪周圍均勻分布小輪子的全向輪,大輪由電機驅動;小輪可自由轉動。這種全方位輪可有效避免普通輪子不能側滑所帶來的非完整性約束,使機器人具有平面運動的全部三個自由度,機動性增強。基于以上分析,選擇使用這種全向輪。
1.2 運動學分析
在建立機器人的運動模型前,先做以下假設:
(1)小車是在一個理想的平面上運動,地面的不規則可以忽略。
(2)小車是一個剛體,形變可以忽略。
(3)輪子和地面之間滿足純滾動的條件,沒有相對滑動。
全方位移動機器人由4個全向輪作為驅動輪,它們之間間隔90°均勻分布(如圖1所示),其簡化運動學模型如圖6所示。其中,xw-yw為絕對坐標系;xm-ym為固連在機器人車體上的相對坐標系,其坐標原點與機器人中心重合。θ為xw與xm的夾角;δ為輪子與ym的夾角;L為機器人中心到輪子中心的距離vi為第i個輪子的沿驅動方向的速度。
可求出運動學方程如下:
因為輪子為對稱分布,常數δ為45。,故得到全向移動機器人的運動模型:
P為轉換矩陣。
這樣,就可以將機器人整體期望速度解算到4個輪子分別的速度,把數據傳送到控制器中,可以完成對機器人的控制。
2、基于模糊PID的運動控制器設計
目前,常規PID控制器已被廣泛應用于自動化領域,但常規PID控制器不具備在線整定控制參數忌kp,k1,kD的功能,不能滿足系統的不同偏差對e和偏差值變化率ec及對PID參數的自整定要求,因而不適用于非線性系統控制。
結合該運動控制系統的實際運行條件,設計采用模糊PID控制方法來實現快速移動機器人車輪轉速大范圍誤差調節,將模糊控制和PID控制結合起來構成參數模糊自整定PID算法用于伺服電機的控制,使控制器既具有模糊控制靈活而適應性強的優點,又具有PID控制精度高的特點,使運動控制系統兼顧了實時性高,魯棒性強及穩定性等設計要點,并可通過模糊控制規則庫的擴充,為該運動控制系統方便添加其他功能。
2.1 參數模糊自整定PID的結構
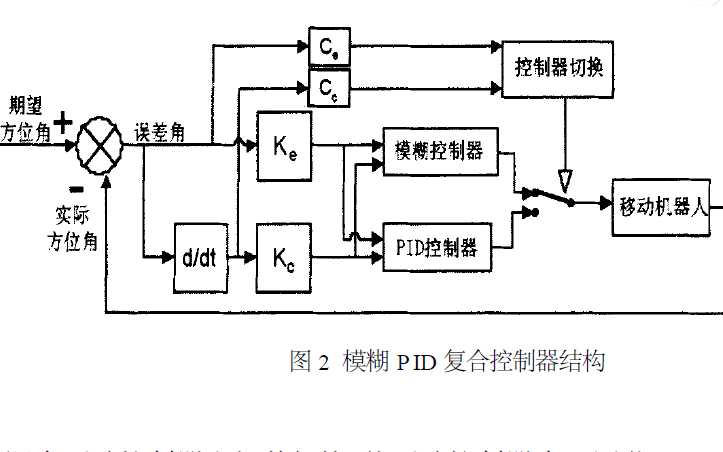
模糊PID控制系統結構框圖如圖2所示,系統的輸入為控制器給定輪速,反饋值為電機光電碼盤反饋數字量,ΔkP,Δk1,ΔkD為修正參數。PID控制器的參數kP,k1,kD。由式(3)得到(kP‘,k1’,kD‘為PID參數初值):
由此,根據增量式PID控制算法可得到參數自整定PID控制器的傳遞函數為:
2.2 速度控制輸入/輸出變量模糊化
該速度控制器的輸入為實際轉速與設定轉速的偏差值e,以及偏差值的變化率ec;輸出量為PID參數的修正量ΔkP,Δk1,ΔkD。它們的語言變量、基本論域、模糊子集、模糊論域及量化因子如表1所示。
在模糊變量E和EC以及輸出量ΔKP,ΔK1,ΔKD,的語言變量和論域確定后,首先必須確定模糊語言變量的隸屬度。常用的隸屬函數有B樣條基函數、高斯隸屬函數、三角隸屬函數等,考慮到設計簡便及實時性的要求,采用了三角隸屬函數。
2.3 參數自整定規則
模糊控制設計的核心是總結工程設計人員的技術知識和實際操作經驗,建立合適的模糊規則表,得到針對kP,k1,kD三個參數分別整定的模糊控制表。根據kP,k1,kD三個參數各自的作用,可制定模糊控制規則。以kP,k1,kD為例,所列規則見表2,k1,kD。可類似推出。
2.4 輸出量解模糊
依據速度模糊控制參數整定規則確定輸出量后,得到的只是一個模糊集合,在實際應用中,必須用一個精確量控制被控對象,在模糊集合中,取一個最能代表這個模糊集合的單值過程稱為解模糊裁決。常用的解模糊算法有最大隸屬度法、加權平均法等,根據實際情況,采用加權平均法進行解模糊。此時,模糊控制器輸出可表示為:
最后,根據式(3)可得到最終的PID控制器參數。模糊PID控制程序流程圖如圖3所示。
3、實驗結果
為了驗證參數模糊自整定PID控制器的有效性,對直流電機分別做了常規PID控制和模糊PID控制實驗。實驗中給定輪速為50 min,圖4為采用常規PID控制方法控制的電機轉速;圖5為采用模糊PID控制方法控制的電機轉速。從結果看,采用參數模糊自整定PID算法能夠明顯降低超調量,加快響應速度,改善控制系統對輪速的控制效果。
4、結 語
機器人運動控制系統是整個Robocup機器人系統的執行機構,在場上的表現直接影響了整個足球機器人系統。以足球機器人為平臺,考慮到系統的時滯性和非線性,采用了模糊控制與PID控制相結合的方式,并在自行研制的足球機器人上進行了速度控制的實驗研究。結果表明,該方法彌補了常規PID控制應用在機器人運動速度控制時超調量大,響應時間長的缺點,可以取得理想的效果。目前該方法已應用于足球機器人的運動控制,并在第七屆中國機器人大賽暨ROBCUP中國公開賽中取得了優異的成績。
責任編輯:gt
-
控制器
+關注
關注
112文章
16382瀏覽量
178319 -
機器人
+關注
關注
211文章
28466瀏覽量
207310 -
PID
+關注
關注
35文章
1472瀏覽量
85570
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論