") 基于SPT-K控制器實現(xiàn)汽車超聲波自動剎車系統(tǒng)的設(shè)計
基于SPT-K控制器實現(xiàn)汽車超聲波自動剎車系統(tǒng)的設(shè)計
前言
現(xiàn)在,人們在享受駕駛樂趣的同時,更加注重的是汽車的安全性,許多“追尾”事故都與車距保持不當(dāng)有關(guān)。為了解決能見度較低情況下的安全問題,我們基于超聲波測距的原理,采用SPT-K控制器設(shè)計了一套系統(tǒng),實現(xiàn)在行駛過程中,一旦出現(xiàn)前后車距小于安全距離、對人車安全構(gòu)成威脅時,車輛自動報警、自動剎車的功能,起到減少交通事故發(fā)生的目的。
1、超聲波測距原理
人能聽到的聲音頻率為:20Hz~20kHz,即為可聽聲波,超出此頻率范圍的聲音,即20Hz以下的聲音稱為低頻聲波,20kHz以上的聲音稱為超聲波。超聲波為直線傳播方式,頻率越高,繞射能力越弱,但反射能力越強(qiáng)。為此,利用超聲波的這種性能就可制成超聲波傳感器。另外,超聲波在空氣中的傳播速度較慢,為340m/s,這就使得超聲波傳感器使用變得非常簡單。我們選用壓電式超聲波傳感器。它的探頭常用材料是壓電晶體和壓電陶瓷,是利用壓電材料的壓電效應(yīng)來工作的。逆壓電效應(yīng)將高頻電振動轉(zhuǎn)換成高頻機(jī)械振動,從而產(chǎn)生超聲波,可作為發(fā)射探頭;而利用正壓電效應(yīng),將超聲振動波轉(zhuǎn)換成電信號,可作為接收探頭。

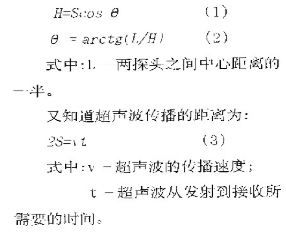
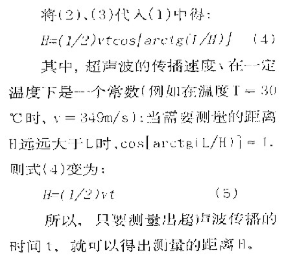
由圖一可知被測距離:
2、SPT-K控制器的功能特點
由于汽車工作的環(huán)境十分惡劣,對硬件的穩(wěn)定性、可靠性要求很高,同時考慮到裝置的可擴(kuò)展性,我們選用上海派恩科技有限公司代理的從芬蘭原裝進(jìn)口的嵌入式系統(tǒng)SPT-K控制器。該控制器能夠在長期惡劣環(huán)境(高振動沖擊、低溫、高溫、溫度變化劇烈和高濕度等)下工作,是一種集可編程邏輯控制器、比例放大器、模擬量輸入A/D模塊、繼電器輸出功能于一身的高性能機(jī)械專用控制器。
SPT-K控制器具有如下特點:
l、取代了傳統(tǒng)電液控制的比例放大器/電路,可同時驅(qū)動12片電液比例閥,在液壓系統(tǒng)的設(shè)計成本上有絕對的優(yōu)勢。
2、具有大電流輸出端口(0~3A),取代了傳統(tǒng)電路中的繼電器。
3、控制器的模擬量輸入端口具備了不同信號的處理能力,不論是電阻信號還是電流信號或是電壓信號都可以進(jìn)行采集并使用軟件編程進(jìn)行設(shè)定。
4、控制器的邏輯控制功能可以很輕松的完成以前用各種繼電器和模塊很難解決的邏輯運算及數(shù)學(xué)運算。
5、控制器內(nèi)部采用數(shù)個16位高性能微處理器以及大容量的內(nèi)存空間使其具有極強(qiáng)的數(shù)字處理能力,可以完成很多以前必須由電腦高級語言來編程的復(fù)雜算法,如直行糾偏多PID控制、發(fā)動機(jī)油泵復(fù)合控制、姿態(tài)模糊控制、自動駕駛等等。
6、控制器是基于CANBUS,總線開發(fā)的產(chǎn)品,當(dāng)系統(tǒng)節(jié)點較多或信號傳輸距離較遠(yuǎn)時可以使用不止一個控制器組網(wǎng),節(jié)省接線、提高可靠性、并且靈活性和可擴(kuò)展性大大加強(qiáng)。
由上述的特點可見:在超聲波汽車自動剎車系統(tǒng)中使用SPT-K控制器,簡化了系統(tǒng)電路,方便了設(shè)計和維修。并且,SPT-K控制器硬件的可靠性遠(yuǎn)優(yōu)于同類產(chǎn)品,使得無論在東北雪原極寒,還是在東南亞熱帶雨林中,都具備極高的可靠性,故障率大幅降低。
3、系統(tǒng)整體設(shè)計
3.1系統(tǒng)硬件框圖
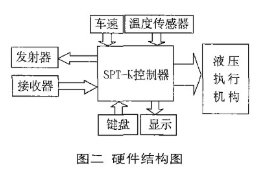
整個系統(tǒng)的硬件框圖如圖二所示。構(gòu)成超聲測距系統(tǒng)的電路功能模塊包括發(fā)射電路、接收電路、鍵盤顯示電路、核心功能模塊SPT-K控制器及一些輔助電路。采取收發(fā)分離方式有兩個好處:一是收發(fā)信號不會混疊,接收探頭所接收到的純?yōu)榉瓷湫盘枺欢菍⒔邮仗筋^放置在合適位置,可以避免超聲波在物體表面反射時造成的各種損失和干擾,提高系統(tǒng)的可靠性。
3.2系統(tǒng)軟件設(shè)計
SPT-K控制器使用歐洲通用IECll31-1語言編程,多種語言編程可選,簡單易學(xué),可讀性強(qiáng),可現(xiàn)場無數(shù)次FLASHING下載程序,改變程序通過EPROM參數(shù)無須重新下載或修改程序,通常使用裝車的顯示器完成,非常方便。
軟件設(shè)計流程圖如圖三所示。
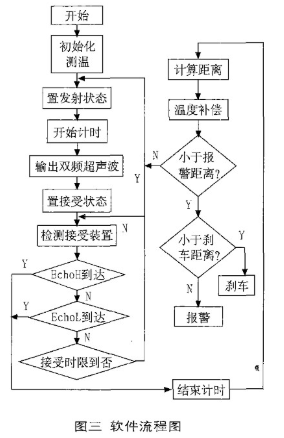
由于在高速公路上和在市區(qū)的情況不同,如果我們僅僅根據(jù)這兩種情況分檔選擇報警和剎車參數(shù),使得車輛在市區(qū)內(nèi)在與前面車距縮短為2m時才報警,有可能因為本車速度很快,而前面的車靜止或車速很慢,就算剎車也無法避免車禍的產(chǎn)生。所以,在設(shè)定報警和剎車參數(shù)時,我們考慮到車速對剎車至停止的距離的影響,根據(jù)一定的算法來設(shè)定參數(shù),以保證車輛絕對的安全。
4、系統(tǒng)設(shè)計優(yōu)化
4.1提高測距的范圍
由于空氣對超聲波的吸收與超聲波頻率成正比,因此用來測距的超聲波的頻率不能很高。另一方面,頻率越低,波長越長,測量的絕對誤差就越大。所以,40Kz的超聲波單頻測距的范圍只有5~6米,無法滿足我們的要求。為了解決測量范圍和測量精度之間的矛盾,我們采用雙頻測距的方法。其測距原理是:控制器現(xiàn)發(fā)出一串頻率為fH的超聲波,串長度可以有10~16個完整的波形,接著送出4~8fL低頻率的超聲波。這種在時域上連續(xù)的兩種頻率的超聲波被前方的目標(biāo)反射后,形成回波,回波經(jīng)由接收器形成回波脈沖EchoH和EchoL。由于高頻聲波先發(fā)出,對于同一個目標(biāo),其回波EchoH先到達(dá)CPU,因此,對于較近的目標(biāo),首先用高頻超聲波探測。當(dāng)目標(biāo)較遠(yuǎn)時,高頻超聲波被空氣吸收而大幅衰減,接收器接收到的回波中只有低頻超聲波EchoL。由于該裝置在距離較遠(yuǎn)時對精度要求不是很高,所以可以用EchoL探測。

4.2發(fā)射器探頭對接收器探頭的影響
超聲波從發(fā)射到接收的時間間隔是由控制器內(nèi)部的定時器來完成的。由于發(fā)射器探頭與接收器探頭的距離不大,有部分波未經(jīng)被測物就直接繞射到接收器上,造成發(fā)送部分與接受部分的直接串?dāng)_問題。這一干擾問題可通過軟件編程,使控制器不讀取接收器在從發(fā)射開始到“虛假反射波”結(jié)束的時間段里的信號。這樣,就有效的避免了干擾,但另一方面也形成了20cm的‘’盲區(qū)“。此”盲區(qū)“很小,對本系統(tǒng)沒有影響。
4.3溫度的補(bǔ)償
因為超聲波的傳播速度:
5、結(jié)束語
本系統(tǒng)具有硬件簡單、容易實現(xiàn)、測距范圍比較大、靈敏度高、可靠性好的優(yōu)點,具有很高的應(yīng)用價值。
責(zé)任編輯:gt
-
控制器
+關(guān)注
關(guān)注
112文章
16339瀏覽量
177851 -
汽車電子
+關(guān)注
關(guān)注
3026文章
7943瀏覽量
166934 -
超聲波
+關(guān)注
關(guān)注
63文章
3014瀏覽量
138351
發(fā)布評論請先 登錄
相關(guān)推薦






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論