 利用HCTI-2032正交解碼器在多軸運動控制系統中位置檢測接口的應用
利用HCTI-2032正交解碼器在多軸運動控制系統中位置檢測接口的應用
1 引言
在機器人和其他精密儀器的控制系統中,位置檢測是需要解決的重要問題之一,位置檢測的精度和穩定性對控制系統起著關鍵作用。計量光柵傳感器、旋轉編碼器、激光陀螺等測量系統的輸出一般為兩路相位差90°的正交解碼脈沖信號。根據正交解碼信號之間相位的超前與滯后關系,把正交信號轉換為另外兩路信號,分別為代表正交信號任一路脈沖數的脈沖序列以及代表正交信號相位關系的控制信號。它們分別送到可逆計數器的計數輸入端和加/減控制端。根據可逆計數的結果可獲得測量系統所需要的位移或角位移等測量。在輪式移動機器人運動控制系統中常用旋轉編碼器檢測車輪的速度和角度,從而構成閉環系統實現運動控制算法。一般微處理器不帶正交解碼脈沖接口,而一些專為控制電機推出的DSP,如TI公司的C24x、C27x、C28x系列只提供了兩路正交解碼脈沖接口,且是與捕捉功能復用的,不能滿足檢測兩個以上位置的需要,因此設計開發解碼器與微處理器的接口具有重要的應用價值。
2、 HCTL-2032介紹
HCTI-2032是Avago公司生產的CMOS專用集成電路,集噪聲濾波、正交解碼、可逆計數、總線接口于一體,可大大改善測量系統的性能。相比HCTI-2022而言,HCTL-2032可接收兩路正交解碼脈沖,并且增加了接收基準信號,時鐘周期達33MHz,不僅節省了電路設計的體積,而且提高了測量精度和處理數據的速度。
2.1 功能
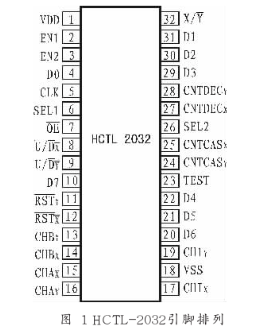
HCTL-2032的引腳排列如圖1所示,HCTL-2032可以將光電編碼器輸出的波形轉換成數字信號輸入微處理器,兩路輸入引腳CHAx、CHAv、CHIx和CHBx、CHBy、CHIy經過施密特觸發器整形濾波后,通過設置EN1、EN2的值選擇采用4×、2×、1×計數模式,而后送入32位二進制計數器對采集的正交波計數,由于輸出數據線只有8位,因此32位的數據需要通過改變控制線SEL1、SEL2、OE的值分四次依次讀出。
2.2 內部結構
HCTL-2032內部包括數字濾波器、正交解碼邏輯、位置計數器、總線接口,內部結構框圖如圖2所示。

2.2.1 數字濾波器
HCTL-2032的輸入部分包括施密特觸發器與數字延遲濾波器,用于抑制混入正交信號的噪聲。正交信號通過施密特觸發器后,必須保持3個上升沿才能通過數字濾波器,小于1 V的低電平噪聲被濾除。余下的高電平、短持續時間噪聲脈沖通過數字濾波器濾除。
2.2.2 正交解碼
HCTL-2032提供了1×、2×、4×三種可選解碼方式,解碼方式的選擇由EN1、EN2的組合值控制,正交輸入相鄰跳變沿之間二者的電平狀態有四種:10、11、01、00。當選擇4×模式時,在一個周期內正交解碼器在時鐘上升沿采樣四種狀態進行計數,同理,當選擇2×和1×模式時,在一個周期內正交解碼器在時鐘上升沿分別采樣兩種、一種狀態進行計數。每監測到一次狀態變化,在CNTDEC引腳輸出一個寬度為半個時鐘周期的正脈沖。同時給出狀態轉移方向信號,U/D=1,表明A相超前B相。反之B相超前A相。圖中同時還給出計數器溢出時的級聯信號CNTCAS。正交解碼器對信號與時鐘的要求為tES>tCLK。
2.2.3 32位二進制計數器與32位鎖存器
正交解碼采集的脈沖輸入32位增/減計數器,在時鐘的上升沿計數,計數值送入32位鎖存器,使用時通常有以下幾種情況:
(1) 計數范圍在32位計數器計數值范圍之內,計數值代表絕對位置。
(2) 統作往返周期運動且每周計數值小于32位時,可由RST每個周期復位一次計數器。
(3) 統也可用作8、16、24、32位計數,這時兩次讀取的計數差代表絕對位置,系統絕對位置可由系統軟件計算,但是計數器會上溢或下溢,為了防止位置信息丟失,必須保證每次計數差不超過計數器最大計數的一半,即8位,16位,24位,32位分別應該在127,32 767,8 388 607,2 147 483 647內讀取數據。
(4) 統計數大于32位時,可用控制端口與其他計數器構成更高位的計數器,從而得到計數絕對值,32位鎖存器在非讀數據期間的每個上升沿捕捉計數器的值。在讀取數據時,不再捕捉新的數據值,保證數據的正確性,數據讀完后由RST信號將鎖存器清0。
2.2.4 禁止邏輯和總線接口
禁止邏輯在每個時鐘周期的下降沿采樣OE、SEL1和SEL2的值,根據三個信號不同值的組合分四次從總線接口讀出計數器的值以及復位禁止邏輯。
3、 與TMS320F2812的接口電路
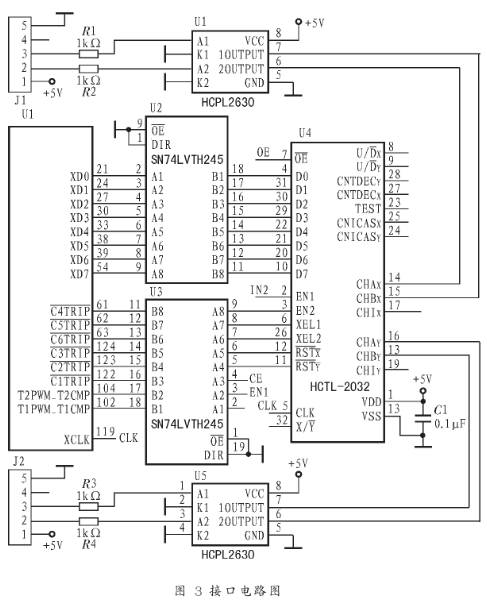
TMS320F2812是TI公司最新推出的DSP器件。它具有數字信號處理能力、強大的事件管理能力和嵌入式控制功能、運算速度快、接口資源豐富,適用于具有大批量數據處理的測控場合。TMS320F2812只提供了兩個事件管理器EV1和EV2,每個事件管理器模塊都有一個正交編碼脈沖電路QEP1和QEP2,QEP3和QEP4,只接收兩路正交編碼脈沖。TMS320F2812工作電壓是3.3 V,而HCTL-2032工作電壓是5 V,兩者之間不能直接相連,必須采用電平轉換器,本設計采用SN74LVTH245驅動,同時為了防止負載對DSP的影響,采用雙通道高速光耦HCPL2630進行隔離。硬件電路如圖3所示。
4.2 讀取數據
數據的讀取分四次完成,依次從高字節到低字節讀出,讀取每個字節定義三個變量:Result、Result_old、Result_new,分別用于存放最終結果、前一次的讀數值、下一次的讀數值。首先DSP從數據線上獲得HCTL-2032引腳值。為了保證數據的可靠性,DSP將重復讀取引腳的值,若兩次數據相同,則把這個數作為最終值,反之,則說明數據不穩定,繼續讀取。采用4×解碼模式,讀取x通道數據時,讀取數據的流程圖如圖4所示。
5、 結束語
HCTI-2032正交解碼器內部具有32位計數器,因此計數過程由器件本身硬件完成,減輕了CPU的計數負擔。解碼器與CPU接口方便,非常適合在多軸運動控制系統中擴展編碼器位置檢測接口。
責任編輯:gt
-
集成電路
+關注
關注
5389文章
11572瀏覽量
362223 -
解碼器
+關注
關注
9文章
1144瀏覽量
40794 -
控制系統
+關注
關注
41文章
6633瀏覽量
110679
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論