") 基于CAN總線與ARM的汽車節(jié)能控制裝置設(shè)計
基于CAN總線與ARM的汽車節(jié)能控制裝置設(shè)計
本文以節(jié)約能源為切入點,針對城市公交車頻繁剎車的特點,設(shè)計了一種節(jié)能控制裝置,通過該裝置把汽車剎車時由原來通過摩擦片產(chǎn)生阻力停車,改為帶動空氣壓縮機(jī)工作。
把汽車行駛時的動能轉(zhuǎn)化為高壓氣能,利用能量的轉(zhuǎn)換使汽車停下來。在汽車啟動時,利用儲存起來的高壓氣能帶動汽車行走,從而達(dá)到節(jié)約能源的目的。
引言
由于各種原因,公交車總是不斷重復(fù)加速—減速或停車—再加速的過程。通過加裝本節(jié)能裝置,當(dāng)汽車需要制動時,在主控單元的控制下,可將汽車行駛時具有的巨大動能通過空氣壓縮機(jī)轉(zhuǎn)化成高壓氣體的勢能并儲存起來,從而實現(xiàn)汽車減速或停車。當(dāng)汽車需要啟動或加速時,用儲存起來的高壓氣體勢能代替燃油來驅(qū)動汽車,從而實現(xiàn)汽車能量的回收再利用,達(dá)到節(jié)能的效果。同時由于汽車在起動或加速時能耗最大,如果汽車是用燃油驅(qū)動,則此時油料燃燒不充分,燃燒效果最差,而且產(chǎn)生的噪音最大。
系統(tǒng)工作原理
本系統(tǒng)主要由三部分組成,即檢測部分,控制部分和執(zhí)行機(jī)構(gòu)。檢測部分包括踏板位置傳感器、曲軸位置傳感器、壓縮機(jī)活塞位置傳感器、汽車運行速度傳感器、儲氣罐壓力傳感器等信號的檢測。執(zhí)行機(jī)構(gòu)主要包括雙向可控電磁閥和電磁離合器。控制部分主要由ARM微處理器組成的控制系統(tǒng)及一些外圍電路構(gòu)成。本文主要介紹該系統(tǒng)的控制部分。該裝置的作用就是將剎車時本應(yīng)由摩擦來消耗掉的汽車動能,改為由氣體的勢能來消耗,在啟動時,利用剎車時儲氣罐內(nèi)儲存的高壓氣體勢能來驅(qū)動汽車行走,當(dāng)車速到達(dá)一定值如20km/h時,再切換到由汽車發(fā)動機(jī)驅(qū)動的模式。
系統(tǒng)硬件設(shè)計
由于該節(jié)能裝置需檢測的模擬量較多,如儲氣罐內(nèi)的壓力、制動踏板的位置、車速、活塞運行位置和油門踏板位置等數(shù)據(jù),而且有些是需實時監(jiān)控的,如儲氣罐內(nèi)的壓力等,需要使用多任務(wù)執(zhí)行方可實現(xiàn),而普通單片機(jī)無法滿足這一要求。因此需根據(jù)實際情況,選用合適的處理器芯片,加上各種數(shù)據(jù)和程序存儲芯片構(gòu)成最小系統(tǒng)。同時,增加數(shù)據(jù)采集、顯示、通信接口、控制執(zhí)行單元和電源管理模塊等,來組成一個完整的控制系統(tǒng)。由于目前汽車應(yīng)用CAN現(xiàn)場總線比較廣泛,因此,為了與汽車的控制系統(tǒng)連接的方便,還增加了CAN總線接口,由此構(gòu)成了整個硬件系統(tǒng)。系統(tǒng)的總體框圖如圖1所示。
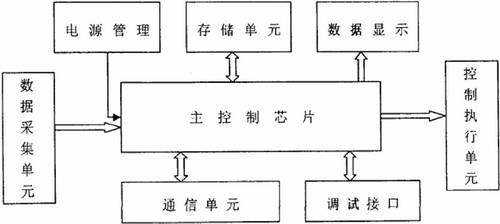
圖1 系統(tǒng)框圖
S3C44BOX
由于設(shè)計要求系統(tǒng)能隨車采集信號,并進(jìn)行實時監(jiān)控,對主控模塊的要求較高,因此主控制模塊應(yīng)當(dāng)是以高性能的微處理器為核心而組成的一個最小系統(tǒng)。根據(jù)具體應(yīng)用的要求,實際應(yīng)用的反映情況,選用了Samsung公司的ARM芯片S3C44BOX,其主要性能如下:
Samsung公司推出的16/32位RISC處理器S3C44BOX為一般類型的應(yīng)用提供了高性價比和高性能的微控制器解決方案。為了降低成本,S3C44BOX提供了豐富的內(nèi)置部件,包括:8KB的Cache,內(nèi)部SRAM, LCD控制器,帶自動握手的2通道DART, 4通道DMA,系統(tǒng)管理器(片選邏輯,F(xiàn)P/EDO/SDRAM控制器),帶有PWM功能的5通道定時器,I/O端口,RTC, 8通道10位ADC,IIC-BUS接口,IIS-BUS接口,同步SIO接口和PLL倍頻器。
S3C44BOX的突出特性是它的CPU核,是由ARM公司設(shè)計的16/32位ARM7TDMI RISC處理器(66MHz)。ARM7TDMI體系結(jié)構(gòu)的特點是它集成了Thumb代碼壓縮器,ICE (In Circuit Emulator)斷點調(diào)試支持,和一個32位的硬件乘法器。
數(shù)據(jù)采集單元
數(shù)據(jù)采集單元的作用就是對需要的模擬信號進(jìn)行采集、處理后送到處理器進(jìn)行處理。在該單元中,核心是對模擬信號的調(diào)理。由于系統(tǒng)要采集到汽車的儲氣罐內(nèi)的壓力數(shù)據(jù)、制動踏板的位置數(shù)據(jù)、車速、離合器切合位置和油門踏板位置等數(shù)據(jù),因此需要多路數(shù)據(jù)采集通道。各通道的數(shù)據(jù)必須完成信號的調(diào)理后,才能送到處理器進(jìn)行處理。該采集單元的信號采集通道框圖如圖2所示。

圖2 信號采集通道
控制執(zhí)行單元
控制執(zhí)行單元的功能主要是接收處理器發(fā)出的數(shù)字量,經(jīng)過隔離及驅(qū)動后,送到執(zhí)行機(jī)構(gòu)如電磁閥、繼電器、離合器等來使行相應(yīng)的動作。功能框圖如圖3所示。

圖3 控制執(zhí)行單元
這一級相對來說較為簡單,但為了防止外界對系統(tǒng)的干擾,須采用隔離。隔離器件采用普通的光電禍器即可,系統(tǒng)中采用TLP521-1。
數(shù)據(jù)顯示模塊
在系統(tǒng)的設(shè)計中,為了對采集的數(shù)據(jù)進(jìn)行監(jiān)控,使得調(diào)試更為方便、直觀,因此增加了數(shù)據(jù)顯示模塊。S3C44BOX集成了LCD (Liquid Cristal Display)控制器,該控制器支持在LCD上的單色、4級、16級灰度、256色的顯示,具有很強(qiáng)的通用性,S3C44BOX的LCD控制器的作用是將緩存中的數(shù)據(jù)傳送到外部的LCD驅(qū)動器,并產(chǎn)生必須的LCD控制信號。LCD控制器可以編程支持不同水平和垂直點數(shù)(640×480,320×240,160×160等)、不同數(shù)據(jù)線寬度、不同接口時序和刷新速率的LCD,支持4位雙掃描、4位單掃描、8位單掃描模式,并支持水平/垂直滾動,以用來支持更大的屏幕顯示(如1280× 1280)。
由于不同尺寸的LCD具有不同數(shù)量的垂直和水平象素、數(shù)據(jù)接口、數(shù)據(jù)寬度、接口時間和刷新率,S3C44BOX中的LCD控制器可以對相應(yīng)的寄存器值進(jìn)行編程,以適應(yīng)不同的LCD顯示板。
LCD控制器邏輯框圖如下圖4所示。
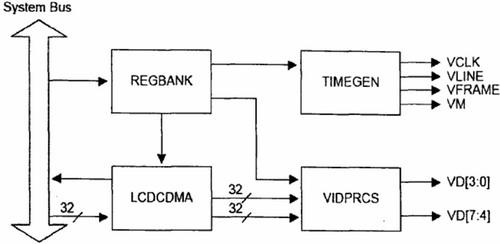
圖4 LCD控制器邏輯框圖
在本系統(tǒng)設(shè)計中,由外部供給系統(tǒng)單一的9V電源,通過三端穩(wěn)壓AS1117-5.0, AS1117-3.3和AS1117-2.5,分別得到5.0V, 3.3V以及2.5V。AS1117系列穩(wěn)壓器最大能提供800mA電流,由于本系統(tǒng)功耗較低,最大需求電流不超過300mA,因此用AS1117足以滿足系統(tǒng)的供電需求。另外的兩套±15V電源由DC/DC變換器供給。考慮到系統(tǒng)中有數(shù)字電路和模擬電路,由于數(shù)字電路的電流變化較快,容易產(chǎn)生脈沖干擾,從而影響模擬信號的采樣精度,因此應(yīng)把數(shù)字地和模擬地分開。
調(diào)試接口
S3C44BOX內(nèi)嵌JTAG測試電路,使得調(diào)試起來非常方便。JTAG是一種國際標(biāo)準(zhǔn)測試協(xié)議,主要用于芯片內(nèi)部測試及對系統(tǒng)進(jìn)行仿真、調(diào)試,JTAG技術(shù)是一種嵌入式調(diào)試技術(shù),它在芯片內(nèi)部封裝了專門的測試電路TAP (Test Access Port,測試訪問口),通過專用的JTAG測試工具對內(nèi)部節(jié)點進(jìn)行測試。JTAG測試允許多個器件通過JTAG接口串聯(lián)在一起,形成一個JTAG鏈,能實現(xiàn)對各個器件分別測試。JTAG接口還常用于實現(xiàn)ISP(In System Programmable)功能,如對Flash器件進(jìn)行編程等。
目前JTAG接口的連接有兩種標(biāo)準(zhǔn),即14針接口和20針接口,在本設(shè)計中,采用的是14針的接口。該接口主要通過下載電路與計算機(jī)的并行口相連,在集成開發(fā)環(huán)境之下,使用相應(yīng)的JTAG下載代理軟件就可以用來進(jìn)行系統(tǒng)調(diào)試,而不需專門的仿真器,這樣可以降低開發(fā)的成本。
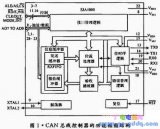
通信單元
在系統(tǒng)設(shè)計中,考慮到數(shù)據(jù)傳送、下載以及調(diào)試的方便,增加了串行通信RS-232C接口。另外,考慮到系統(tǒng)升級的方便,以及為了與現(xiàn)在流行的汽車總線接口的方便,增加了CAN現(xiàn)場總線的接口。
本系統(tǒng)中選用MAX232。MAX232可以實現(xiàn)TTL電平和RS-232電平之間的轉(zhuǎn)換。由于在實際應(yīng)用中,器件對電源噪聲很敏感,因此MAX232的VCC引腳必須要對地加0.lmF去耦電容,另外,為提高抗干擾能力,添加了四個l0mF電容,在連接在內(nèi)部電源引腳輸出端。MAX232芯片第7, 8引腳接入分別到串行口的第3, 2引腳;9, 10引腳接處理器的RXD, TXD引腳,實現(xiàn)與處理器的連接。
需要注意的是,MAX232是5V器件,而處理器芯片是用的是3V供電,因此需要考慮電平轉(zhuǎn)換,否則將無法正常收發(fā)數(shù)據(jù)。由于Maxim公司已經(jīng)注意到這點并推出了專用3V供電的器件MAX3232C,利用它就可以無需考率3V到5V的電平轉(zhuǎn)換問題。MAX3232C與處理器的接口電路如圖5所示。
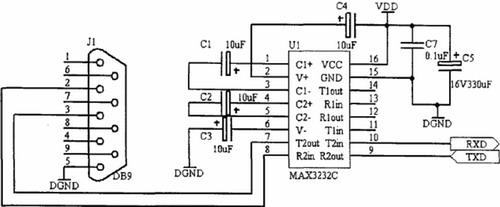
圖5 RS-232C與處理器的通信接口電路
系統(tǒng)軟件設(shè)計
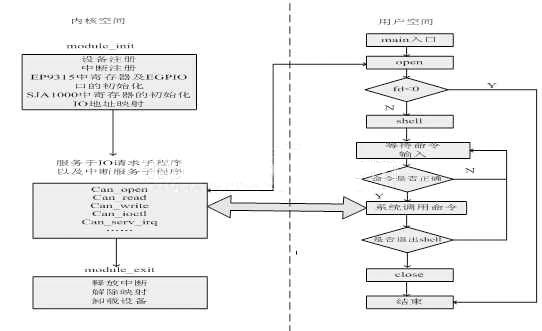
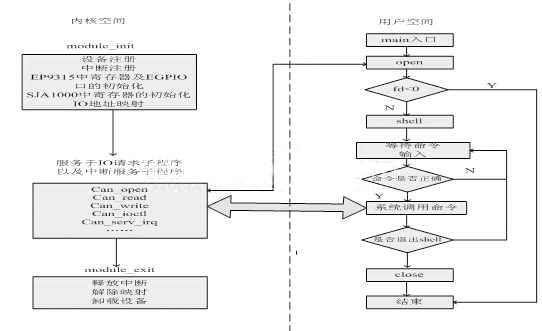
在本系統(tǒng)中,主程序是整個程序的核心,擔(dān)負(fù)著系統(tǒng)的運行、控制的主要任務(wù),需要對其控制流程進(jìn)行仔細(xì)考慮,以完成所需的控制要求。
在程序開始時,首先對系統(tǒng)進(jìn)行初步的初始化。之后,采集各種數(shù)據(jù)并判斷數(shù)據(jù)是否正常,如果正常,則顯示數(shù)據(jù)并等待中斷,根據(jù)中斷轉(zhuǎn)向相應(yīng)的中斷服務(wù)子程序。如果數(shù)據(jù)不正常,則通過報警來提示用戶檢查數(shù)據(jù),直到數(shù)據(jù)正常才執(zhí)行其他程序。如果一切正常,且沒有剎車和啟動等控制,則可以與其他設(shè)備進(jìn)行通信等操作。具體的流程見圖6所示。
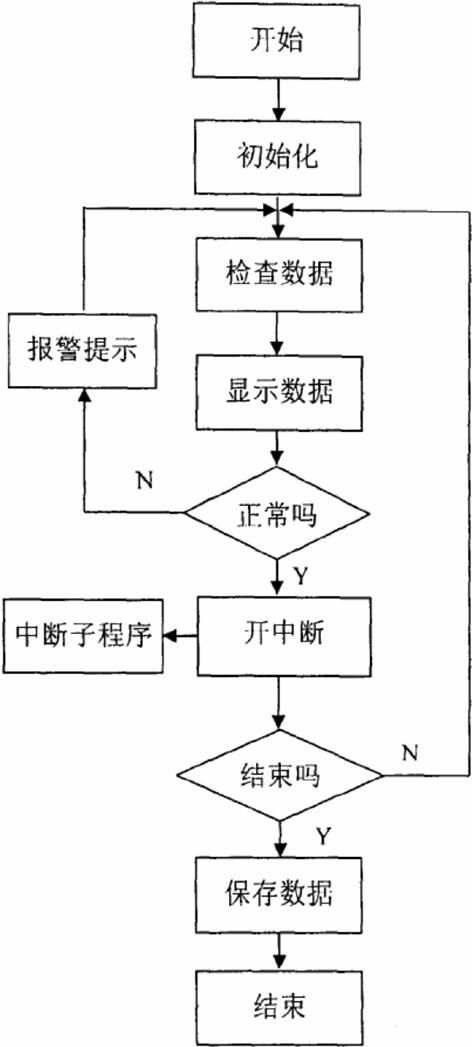
圖6 系統(tǒng)主程序流程圖
系統(tǒng)的抗干擾設(shè)計
要達(dá)到良好的系統(tǒng)控制效果需要在系統(tǒng)設(shè)計中非常注意它的抗干擾性和可靠性。本系統(tǒng)由于采用高速ARM作為核心處理器,它的高頻信號不僅容易受到干擾,而且也會成為系統(tǒng)的干擾源,因此有必要對整個系統(tǒng),特別是ARM部分的抗干擾及保護(hù)做更多的處理。
硬件部分,控制系統(tǒng)的電源及功率驅(qū)動部分抗干擾措施主要就是從防和抗兩方面入手。其總原則是:抑制或消除干擾源;切斷干擾對系統(tǒng)的耦合通道;降低系統(tǒng)對干擾信號的敏感性。抗干擾設(shè)計的具體措施包括:隔離、接地、屏蔽、濾波等常用方法。
軟件部分,本系統(tǒng)的軟件主要采用了以下幾種軟件抗干擾設(shè)計:
軟件陷阱法
測試系統(tǒng)在遇到外界干擾時,往往會導(dǎo)致運行程序進(jìn)入程序存儲器的空白區(qū)(即無指令區(qū)),這種現(xiàn)象叫做程序“跑飛”。于是在各子程序之間、各功能模塊之間和所有空白處,都寫上連續(xù)3個空操作指令(nop),后接一無條件轉(zhuǎn)移指令,一旦程序跑飛到這些區(qū)域,就會自動返回執(zhí)行正常程序。
程序的冗余設(shè)計
在程序存儲器的空白區(qū)域,寫入一些重要的數(shù)據(jù)表和程序作為備份,以便系統(tǒng)程序被破壞時仍有備份參數(shù)和程序維持系統(tǒng)正常工作。由于TMS320LF2407A的數(shù)據(jù)存儲以數(shù)據(jù)頁為基準(zhǔn),如果對不同數(shù)據(jù)頁的數(shù)據(jù)進(jìn)行操作而不指定相應(yīng)的數(shù)據(jù)頁,會導(dǎo)致程序跑飛。因此需要對程序未使用滿的數(shù)據(jù)頁進(jìn)行填充,防止數(shù)據(jù)頁混亂導(dǎo)致的系統(tǒng)誤操作。
結(jié)語
加裝了能量回收再利用裝置后,當(dāng)汽車在加速或重新起動初期,可以利用存儲的高壓氣體驅(qū)動汽車,不需要燃料,可以較少汽車尾氣對環(huán)境的污染。因此,該裝置不僅可以節(jié)約能源,而且有利于環(huán)保。
-
電源
+關(guān)注
關(guān)注
184文章
17734瀏覽量
250466 -
ARM
+關(guān)注
關(guān)注
134文章
9100瀏覽量
367766 -
CAN總線
+關(guān)注
關(guān)注
145文章
1952瀏覽量
130806 -
QC
+關(guān)注
關(guān)注
0文章
31瀏覽量
15471
發(fā)布評論請先 登錄
相關(guān)推薦
汽車CAN總線技術(shù)
汽車電子與CAN總線-汽車車身網(wǎng)絡(luò)系統(tǒng)
汽車CAN總線系統(tǒng)原理、設(shè)計與應(yīng)用
CAN總線調(diào)度算法在汽車電子控制網(wǎng)絡(luò)中有哪些應(yīng)用?
怎么實現(xiàn)基于CAN總線的電動汽車控制系統(tǒng)設(shè)計?
怎么設(shè)計一款ARM嵌入式汽車節(jié)能控制系統(tǒng)?
基于ARM的CAN總線智鹺節(jié)點的i殳計
Linux環(huán)境下實現(xiàn)ARM9的CAN總線通信
Linux環(huán)境下實現(xiàn)基于ARM9的CAN總線通信
CAN總線控制器設(shè)計及測試程序





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論