") 采用CAN-232B智能型轉(zhuǎn)換網(wǎng)橋?qū)崿F(xiàn)地面變電所模擬盤控制器的設(shè)計
采用CAN-232B智能型轉(zhuǎn)換網(wǎng)橋?qū)崿F(xiàn)地面變電所模擬盤控制器的設(shè)計
1、 問題的提出
以前對井下電力負荷的監(jiān)控,只能靠模擬電表來指示。現(xiàn)在可以采用計算機控制與管理,用模擬盤顯示井下負荷的動態(tài)工作情況。可以借助CAN-232B智能型轉(zhuǎn)換網(wǎng)橋和模擬盤控制器來實現(xiàn)這些。
CAN-232B智能型轉(zhuǎn)換網(wǎng)橋,用于PC或其他帶RS 232端口的設(shè)備與CAN設(shè)備之間的通訊CAN(Controller Area Network)是一種串行總線系統(tǒng)。CAN擁有高傳輸速度(高達1 Mb/s)和高可靠性,能以高性能和高品質(zhì)的方式實現(xiàn)高度可靠的監(jiān)控系統(tǒng)。為了能在通常的RS 232設(shè)備上使用CAN網(wǎng)絡(luò),CAN-232B設(shè)計成將RS 232的串行幀重新打包為CAN擴展幀,并通過CAN收發(fā)器發(fā)送到CAN總線上;反之,如果CAN-232B的收發(fā)器收到CAN總線上的數(shù)據(jù)幀,而且通過了驗收碼校驗,它就會把CAN幀拆包,并將其中的數(shù)據(jù)發(fā)到RS 232口上,因此它可以在CAN與。RS 232之間精確地轉(zhuǎn)換信息。
CAN-232B有2種工作模式:設(shè)置模式和工作模式。在設(shè)置模式下,用戶可對它的參數(shù)進行設(shè)置。而在工作模式中,它完成上述的協(xié)議轉(zhuǎn)換。CAN-232B特別適合小流量的CAN-bus數(shù)據(jù)傳輸應(yīng)用,最高可達300幀/s的數(shù)據(jù)傳輸速率。
CAN-232B采用表面安裝工藝,板上自帶光電隔離模塊,在控制電路和CAN電路之間實現(xiàn)完全電氣隔離。CAN-232B也采用防雷設(shè)計,每線提供600 W的抗雷擊承受力,加上獨立的DC/DC電源,這樣的三保險設(shè)計使CAN-232B具有很強的抗干擾能力,大大提高系統(tǒng)在惡劣環(huán)境中使用的可靠性。
2、 模擬盤控制器的功能
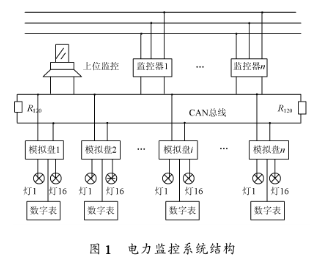
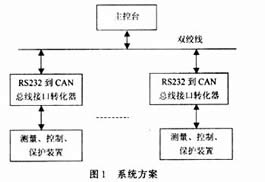
電力監(jiān)控模擬盤設(shè)于地面變電所,主要用于低電壓等級供配電系統(tǒng)的計算機監(jiān)測與控制。在供電系統(tǒng)的每條配電回路中安裝1臺監(jiān)控器,通過CAN總線通信網(wǎng)絡(luò)與現(xiàn)場控制站及中央控制站共同形成一個供配電計算機監(jiān)控與管理系統(tǒng)。
模擬盤控制器是電力監(jiān)控系統(tǒng)的顯示部分,在現(xiàn)場中的監(jiān)控器采集到回路的模擬量、開關(guān)量,并將這些數(shù)據(jù)根據(jù)CAN總線通訊協(xié)議轉(zhuǎn)化成可傳送的數(shù)據(jù)幀格式發(fā)送到CAN總線上。模擬盤控制器一直“掛”在CAN總線上,當(dāng)CAN總線上有數(shù)據(jù)時,模擬盤控制器利用接受中斷程序接收這些數(shù)據(jù)幀,并根據(jù)CAN總線的通信協(xié)議將數(shù)據(jù)幀還原成相應(yīng)數(shù)據(jù)發(fā)送到自身所攜帶的指示燈或數(shù)字表上進行顯示。當(dāng)調(diào)度端主機發(fā)出遙控合閘或遙控選線命令,模擬盤控制器根據(jù)CAN總線協(xié)議將命令轉(zhuǎn)化成可傳送的數(shù)據(jù)幀格式,利用發(fā)送中斷程序傳送到CAN總線上,現(xiàn)場相應(yīng)的開關(guān)接受到命令后進行相應(yīng)的動作。
3、 模擬盤控制器的硬件設(shè)計
3.1 硬件電路設(shè)計
模擬盤控制器的硬件電路主要由:P8XC592單片機、1232看門狗、RAM數(shù)據(jù)存儲器6264、ROM程序存儲器27C256、CAN控制器接口PC:82C250,RS 485通訊、光電耦合器6N137、光隔等構(gòu)成。
P8XC592單片機為整個硬件電路的核心,由Philips公司開發(fā)生產(chǎn)的,適用于自動和通用工業(yè)應(yīng)用的8位高性能微控制器。它在80C51標準特性基礎(chǔ)上增加了一些重要的硬件功能,如與內(nèi)部RAM進行DMA數(shù)據(jù)傳送的CAN控制器;具有總線故障管理功能的1 Mb/s CAN控制器;與標準80C51兼容的全雙工UART等。
P8xC592共有68個管腳,其中P0~P3與80C51相同,并行I/O口P4的功能與P1,P2和P3相同。P5口主要用作A/D變換器的模擬量輸入端。P0~P3還可完成下列功能:PO為擴展P8XC592標準存儲器和外部設(shè)備提供用作分時復(fù)用的低8位地址和數(shù)據(jù)總線;P1可作為外部中斷請求輸入端、外部計數(shù)器輸入端、外部計數(shù)器復(fù)位輸入端和CAN接口的CTX0和CTX1輸出端;P2當(dāng)擴展P8XC592標準存儲器和外部設(shè)備提供用作分時,提供高8位地址;P3引腳可分別進行配置以提供外部中斷請求輸入端、計數(shù)器輸入端、串行口UART的接收輸入端和發(fā)送輸出端以及外部數(shù)據(jù)存儲器的讀和寫控制信號。
本設(shè)計利用P0,P2口作為外部存儲器的高、低位輸出端,P1.0端為模擬盤控制器的外部巡檢操作端,P1.1為閃光解除操作端口,P3.0,P3.1,P3.2為RS 485通訊操作端口,P3.3用于看門狗復(fù)位,P3.4,P3.5用于P0輸出高低位的選通,P3.6,P3.7用于控制外部存儲器的讀寫。在程序設(shè)計中采用外部存儲單元,數(shù)據(jù)存儲器6264,程序存儲器27C256。采用74HCl73進行數(shù)據(jù)的高、低位的位選。
3.2 硬件電路的抗干擾設(shè)計
為了增強CAN總線節(jié)點的抗干擾能力,P80C592芯片的CTX0和CRX0并不直接與82C250的TXD和RXD相連,而設(shè)計為通過高速光耦6N 137后與82C250相連,這樣就很好地實現(xiàn)了總線上各CAN節(jié)點間的電器隔離。光耦部分電路所采用的2個電源完全隔離,這樣可以提高節(jié)點的穩(wěn)定性和安全性,否則采用光耦就失去了意義。
82C250與CAN總線的接口部分也采用了一定的安全和抗干擾措施。82C250的CANH和CANL引腳各自通過1個5 Ω的電阻與CAN總線相連,電阻可起到一定的限流作用,保護82C250免受過流的沖擊。CANH和CANL與地之間并聯(lián)2個30 pF的小電容,起到濾除總線上的高頻干擾和一定的防電磁輻射的能力。
另外芯片P80C592并不直接與輸出電路相連。它們之間被光隔相隔離。當(dāng)外界電路因干擾或者發(fā)生故障導(dǎo)致電路運行參數(shù)突變時,芯片會因光隔的存在而免受影響,從而保證芯片P80C592的安全運行。以上的各種措施使單片機P80C592完全與外界相隔離,在一個相對獨立的環(huán)境中運行,保證了系統(tǒng)的穩(wěn)定性和抗干擾能力。
4、 模擬盤控制器的軟件設(shè)計
4.1 模擬盤控制器主程序設(shè)計
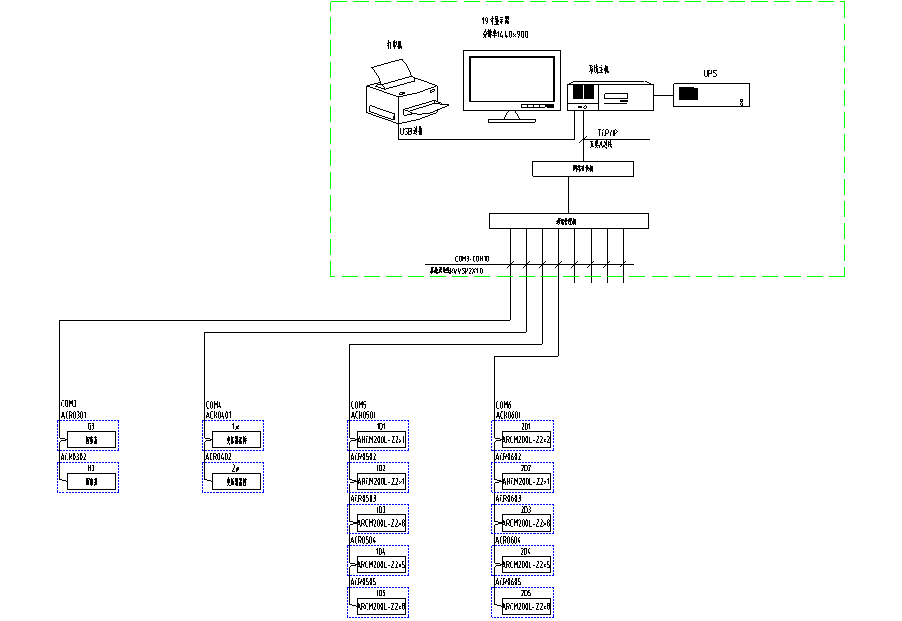
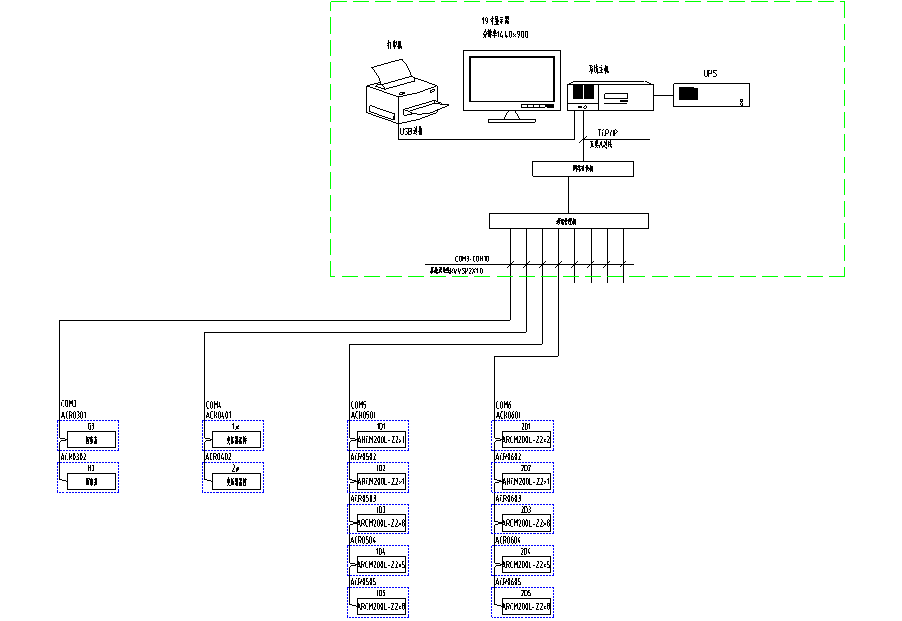
在電力監(jiān)控系統(tǒng)中,每個監(jiān)控器監(jiān)控一個開關(guān)狀態(tài),監(jiān)控器通過CAN總線與模擬盤控制器相連,模擬盤控制器自身攜帶16個指示燈,并通過RS 485通訊卡與一個數(shù)字表頭相連(見圖1)。16個指示燈與監(jiān)控器監(jiān)控的16個開關(guān)狀態(tài)相映射,通過指示燈不同狀態(tài)來折射開關(guān)量的狀態(tài):本文定義了指示燈顯示的3種狀態(tài):紅色、紅快閃、紅慢閃。其中指示燈為紅色代表開關(guān)為正常的工作狀態(tài);指示燈為紅快閃,表示開關(guān)為事故跳閘——報警狀態(tài);指示燈紅慢閃為巡檢狀態(tài);數(shù)字表頭則用來顯示監(jiān)控器采集到的模擬量值。在模擬盤控制器的軟件設(shè)計中,通過定時器來操作指示燈的閃爍快慢,根據(jù)模擬盤通信協(xié)議對P4口各端口進行相應(yīng)的置位、復(fù)位,實現(xiàn)指示燈的現(xiàn)實操作。
4.1.1 初始化
初始化包括:有關(guān)的RAM單元清零、定時中斷初始化、CAN總線初始化、RS 485通訊初始化。
在中斷初始化時,要注意對中斷允許寄存器IEN0、IEN1的置位,尤其是IEN0.7總允許/禁止中斷控制的置位;通過對中斷優(yōu)先級特出功能寄存器IP0,IP1來設(shè)定各中斷源的優(yōu)先級。
4.1.2 巡檢操作
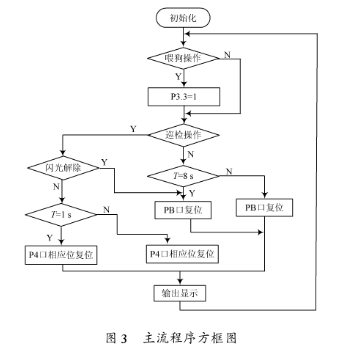
實際操作系統(tǒng)中,設(shè)備常時間運行會出現(xiàn)老化、反映不靈敏的情況。為了防止模擬盤控制器硬件電路以及指示燈本身的故障而導(dǎo)致顯示狀態(tài)不能緊跟開關(guān)狀態(tài)變化,本文設(shè)計了巡檢操作,由P8XC592單片機的P1.0來控制。操作員置位P1.0時,軟件程序?qū)4口所有的位以8 s為周期進行置位、復(fù)位操作(見圖3),模擬盤控制器開始巡檢操作,模擬盤控制器的16路指示燈同時出現(xiàn)“紅慢閃”狀態(tài),如果有1路或幾路指示燈不進行“紅慢閃”,則說明相對應(yīng)的指示燈出故障,操作員可有針對性的排除故障;操作員復(fù)位P1.0時,程序進入到下一步操作——事故報警操作。
4.1.3 事故閃爍、解除
在實際操作中開關(guān)由于事故出現(xiàn)跳閘,監(jiān)控器監(jiān)測到后將信息通過CAN總線傳送到模擬盤控制器上。模擬盤控制器根據(jù)通訊協(xié)議判斷出那個開關(guān)量跳閘,然后對P4口的相應(yīng)位以1 s為周期進行置位、復(fù)位操作,指示燈相應(yīng)的位則進行“紅快閃”。且指示燈的快閃狀態(tài)持續(xù)到事故跳閘處理。
操作員根據(jù)模擬盤上的指示處理相應(yīng)的跳閘事故后,給模擬盤發(fā)出解除命令,指示燈的事故閃爍停止,進入常態(tài)工作。
4.2 模擬盤通信協(xié)議及其中斷服務(wù)程序設(shè)計
4.2.1 模擬盤通信協(xié)議
CAN協(xié)議的一個最大特點是廢除了傳統(tǒng)的站地址編碼,而代之以對通信數(shù)據(jù)塊進行編碼。采用這種方法的優(yōu)點可使網(wǎng)絡(luò)內(nèi)的節(jié)點個數(shù)在理論上不受限制,數(shù)據(jù)塊的標識碼可由11位或29位二進制數(shù)組成,因此可以定義2或2個不同的數(shù)據(jù)塊。數(shù)據(jù)段長度最多為8個字節(jié),可滿足通常工業(yè)領(lǐng)域中控制命令、工作狀態(tài)及測試數(shù)據(jù)的一般要求。同時,8個字節(jié)不會占用總線時間過長,從而保證通信的實時性。CAN協(xié)議采用CRC檢驗并可提供相應(yīng))的錯誤處理功能,保證了數(shù)據(jù)通信的可靠性。
基于CAN總線通信協(xié)議制訂了模擬盤控制器的通信協(xié)議。
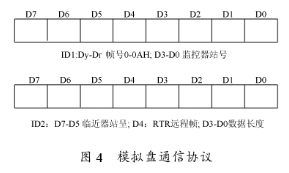
CAN總線傳輸數(shù)據(jù)由2數(shù)據(jù)幀組成:在ID1中,D7~D4為傳輸數(shù)據(jù)的幀號;幀號代表傳輸數(shù)據(jù)為何種命令;監(jiān)控器的站號由ID1中的D3~D0和ID2中的D7~D5共7位128種組合;可對應(yīng)128個監(jiān)控器監(jiān)測的開關(guān)狀態(tài);ID2中的D4表示是否為遠程幀ID2中的D3~D0表示數(shù)據(jù)的長度。
CAN總線此協(xié)議首先充分利用了CAN通信協(xié)議自身的特點,在幀格式的ID號中體現(xiàn)發(fā)送的運行數(shù)據(jù)量的幀號和監(jiān)控器的站號。幀號代表傳輸數(shù)據(jù)的類型,根據(jù)CAN總線的仲裁(CAN總線本身的ID號越小,優(yōu)先權(quán)越大),可以將重要類型的數(shù)據(jù)規(guī)定為幀號較小,這樣就可保證重要數(shù)據(jù)的優(yōu)先級高于其他類型的數(shù)據(jù),程序就會優(yōu)先處理這些數(shù)據(jù)。又可利用仲裁,將重要的監(jiān)控器排列的站號排列得較小,這樣又可保證程序優(yōu)先處理重要的監(jiān)控器監(jiān)控的開關(guān)狀態(tài)。
4.2.2 CAN中斷服務(wù)程序
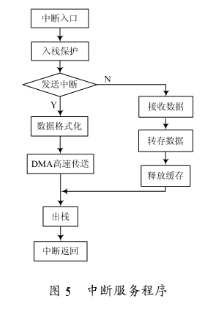
模擬盤控制器通過中斷服務(wù)程序來受CAN總線上的數(shù)據(jù),也是利用中斷服務(wù)程序向CAN總線上發(fā)送數(shù)據(jù)。如果有發(fā)送中斷或接收中斷請求,運行程序就會進入CAN中斷服務(wù)程序,入棧保護現(xiàn)場后,判斷中斷為何種中斷(發(fā)送中斷、接收中斷)。并根據(jù)CAN總線的通信協(xié)議將要發(fā)送的數(shù)據(jù)幀格式或?qū)⒔邮盏臄?shù)據(jù)幀還原,然后發(fā)送或接收數(shù)據(jù),最后出棧進入主運行程序繼續(xù)運行。
5 、結(jié)語
本文采用國際上目前應(yīng)用最為廣泛的現(xiàn)場總線之一CAN總線微處理器技術(shù),進行模擬盤控制器的硬、軟件設(shè)計。通過與監(jiān)控系統(tǒng)實際聯(lián)網(wǎng)進行試驗,所設(shè)計的模擬盤控制器能夠很好地實現(xiàn)規(guī)定的功能和技術(shù)要求。本方案在煤礦地面變電所應(yīng)用表明,對煤礦井下用電情況的監(jiān)視得到明顯地改善。
責(zé)任編輯:gt
-
控制器
+關(guān)注
關(guān)注
112文章
16389瀏覽量
178442 -
CAN總線
+關(guān)注
關(guān)注
145文章
1952瀏覽量
130849 -
微處理器
+關(guān)注
關(guān)注
11文章
2264瀏覽量
82532
發(fā)布評論請先 登錄
相關(guān)推薦
智能型頂板離層儀的研制與應(yīng)用
正弦波電力逆變器在變電所中的應(yīng)用
Link-Max CAN轉(zhuǎn)485/CAN轉(zhuǎn)232智能型CAN轉(zhuǎn)串口轉(zhuǎn)換網(wǎng)橋
Link-Max CAN轉(zhuǎn)485/CAN轉(zhuǎn)232智能型CAN轉(zhuǎn)串口轉(zhuǎn)換網(wǎng)橋
變電站與開閉所、變電所等有什么差別嗎?
CAN總線在分布式變電所自動化系統(tǒng)中應(yīng)用
智能型RS485-CAN總線轉(zhuǎn)換器介紹

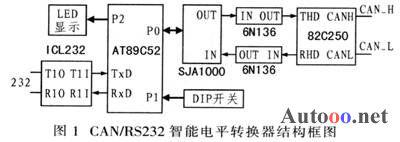
基于采用SJAl000的CAN/RS232智能電平轉(zhuǎn)換器設(shè)計方案
智能型數(shù)字溫度控制器的原理
變電所電能管理系統(tǒng)的設(shè)計和應(yīng)用實例解析
變電所電能管理系統(tǒng)的設(shè)計和應(yīng)用說明





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論