 基于MEGA8單片機和CAN總線實現智能監控節點在線升級
基于MEGA8單片機和CAN總線實現智能監控節點在線升級
1、系統總體設計方案
1.1 系統的拓撲結構
CAN(Controller Area Network)即控制器局域網,是目前廣泛應該的總路線之一。CAN總線通信距離限制小,它的直接通信距離最大可達10km,最高通信速率可以達1Mb/s(此時距離最長為40m),節點數可多達110個。因此它特別適合于工業遠程過程監控設備的互聯和電網絡設備的調試和維護。基于CAN總線的分布式控制系統的一般組成模式如圖1所示。上位機PC機通過RS-232連接到總線上某一智能節點。可以對安裝在現場某些節點的程序進行遠距離在線升級和改變某些功能,因此利用CAN總線進行單片機的在線編程就顯得非常必要。
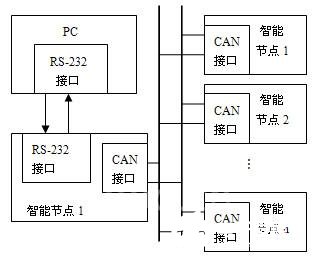
圖1 基于CAN總路線的分布式控制系統
根據圖1所示的CAN總線分布式系統的結構,在線編程采用主從結構。智能節點1為主節點,其它節點為從節點。節點采用ATMEL公司推出的AVR系列單片機MEGA8,內含8K FLASH程序存儲器,1K的內部SRAM,512字節的內部EEPROM。為了便于升級,除了提供ISP即在線編程功能(In System Programming)以外,還提供了BOOT引導功能,為實現IAP即在應用中編程(In Application Programming)為系統升級提供了可能。
1、2 節點升級過程
主節點在編程監控模式下,接收PC機發送的“編程”命令,若編程節點為主節點,則程序可以通過RS-232下載到主節點,主節點接收編程數據,完成 FLASH的在線編程,此時,從節點分別執行各自缺省的應用程序。若編程節點為從節點,則主節點就通過CAN總線進行廣播,全部從節點監控包括被選擇節點 ID號在內的“編程初始信息”,并與各自的節點ID進行比較,被選擇的從節點與主節點和PC機建立編程通信連接,其它從節點繼續運行其缺省應用程序,從而實現了在線升級功能。可見,在從節點編程模式下,主節點在PC機的RS-232總線與從節點的CAN總線之起著路由器的作用。
1、3 CAN總線系統智能監控節點
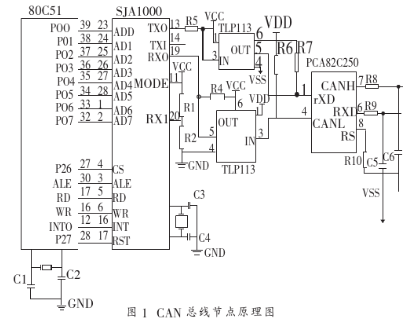
CAN總線系統智能監控節點由5部分組成:微控制器Mega8,并串轉換電路,獨立CAN控制器SJA1000,CAN總線驅動器TJA1050和高速光電耦合6N137。如圖2所示
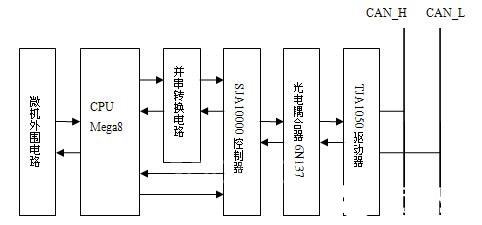
圖2 CAN智能監控節點硬件原理圖
為了提高穩定性和安全性,在SJA1000的TX0和RX0與TJA1050的TXD和RXD相連時,采用了高速光電耦合6N137,并且兩個光電耦合器各自連接兩個完全隔離的電源,這樣就很好地實現了總線上各CAN節點間的電氣隔離。在SJA1000與Mega8通信中,中間加入了一個并串轉換電路。除了給Mega8留出更多的引腳用于外圍電路外,更重要的是傳輸多位數據時,可以通過并串轉換電路,連接到Mega8單片機的通用同/異步串行接口 USART的RXD與TXD引腳。把接收過進來的數據送入USART數據寄存器UDR中,通過ID認證后,進入FLASH編程監控程序,進行自編程修改,達到升級的目的。
2、MEGA8單片機升級功能
2.1 引導加載自編程功能
ATmega8具備引導加載支持的用戶程序自編程功能(In-System Programming by On- chip Boot Program),它提供了一個真正的由MCU本身自動下載和更新(采用讀/寫同時“Read-While-Write”進行的方式)程序代碼的系統程序自編程更新的機制。使用該功能時,MCU可以靈活地運行一個常駐Flash的引導加載程序(Boot Loader Program),實現對讀取代碼,或者從程序存儲器中讀取代碼,然后將代碼寫入(編程)到Flash存儲器中。引導加載程序有能力讀寫整個Flash存儲器,包括引導加載程序所在的引導加載區本身。引導加載程序還可以對自身進行更新修改,甚至可以將自身刪除,使系統的自編程能力消失。基于這個因素,使得在線升級成為了可能。引導加載程序區的大小可以由芯片的熔絲位設置,該段程序區還提供兩組鎖定位,以便用戶選擇對該程序區的不同級別的保護。
2、2 MEGA8的BOOT介紹
由于MEGA8具有IAP可在應用中升級的功能,本系統在軟件設計上采用了BOOT引導功能。主程序采用C語言編寫,BOOT程序則采用了匯編編寫。目的是為了提高下載速度,設計中放棄了ATMEL提供的AVRPROG燒錄軟件,另外采用了一個下載燒錄速度較高的ID通訊協議,在程序代碼量比較大的時候,具有更明顯的速度優勢,并且也便于用戶二次開發。
MEGA8的引導功能可通過相應的熔絲位來確定,BOOT引導程序的入口、BOOT區的大小可以通過燒錄單片機的BOOTSZ1、BOOTSZ0兩個熔絲位來確定。單片機復位后向量入口也是通過燒錄單片機的BOOTRST熔絲位來確定。另外,單片機在執行IAP編程時需要用到 Store Program Memory Control Register(SPMCR)寄存器。
SPMCR寄存器包含了頁擦除,頁寫入,BOOT區加密設置,頁填充及頁的RWW(Read While Write)等功能的設置。需要注意的是在執行每個功能時,都需要設置SPMEN標志,在隨后的4個時鐘周期內運行SPM指令,該標志會在SPM執行完成后自動清零。函數如下:
Do_SPM:
Wait_SPM: ; 等待頁操作完成
in templ,SPMCR
sbrc templ,SPMEN
rjmp Wait_SPM
out SPMCR,temp
spm ; 執行SPM指令
.dw 0xffff
nop
ret
有了以上的函數,就可以很容易的進行頁擦除、頁寫入、頁填充等程序的設計了。比如需要執行頁擦除指令,則首先要將需要擦除的頁地址寫入Z寄存器,然后置位SPM的PGERS(頁擦除位)和SPMEN(SPM允許位),然后再調用Do_SPM函數即可。程序如下:
……
ld temp,y+
mov zl,temp ; Z指針地址賦值
ld temp,y+
mov zh,temp
ldi temp,(1《
rcall Do_SPM ; 執行頁寫入
……
3、BOOT程序介紹及流程圖
Mega8單片機上電后設置冷啟動標志,而熱啟動入口則設置熱啟動標志。然后初始化堆棧、串口以及必要的I/O狀態等。初始化完成后,如果BOOT程序檢測到熱啟動標志則直接進入燒錄狀態;如果為冷啟動標志則繼續檢測下載位是否允許(本設計通過PB0開關選擇),如為高電平則進入燒錄狀態,如為低電平則進入用戶程序。
BOOT引導程序在設計時提供了兩個入口,一個是系統復位時的冷啟動入口,另一個是用戶程序在運行時進入升級程序的熱啟動入口。BOOT程序主要包括燒錄子程序、串口發送、串口接收、引導主程序等。
串口發送采用了查詢發送完成標志。這樣當該標志被設置時,證明串口的停止位已經發送完成,這對于CAN總線通訊非常有用。燒錄程序主要使用“SPM” 指令,該指令完成對MEGA8的燒錄等功能。而讀取MEGA8的指令則使用“LPM”。由于擦除,頁填充,寫入,讀出等基本命令單片機都已解釋完成,因此所有過程都可以由計算機端程序進行控制。
程序開始時,計算機端發送命令,先對單片機的頁進行擦除,然后接收一幀數據,接收完畢后執行頁寫入命令,寫入完成再進行讀出進行校驗,如果校驗無誤再繼續寫入下一頁,直到所有頁都寫入完畢,即完成一次下載過程。如果傳輸或頁校驗出現錯誤,程序會連續進行5次測試,如再仍不成功,則認為本次下載失敗。主程序流程圖如圖3。
MEGA8單片機的主程序通過CAN接口執行計算機發送的命令,并且定義了一個更新代碼的特殊命令,當接收到該命令時,主程序首先關閉中斷,關閉看門狗,然后跳轉到BOOT的熱啟動入口,再執行BOOT下載燒錄程序。下載完成后再直接跳轉到$0000地址進入用戶程序區,這樣就完成了代碼的在線升級。為了保證該命令的可靠性,本程序設計時規定單片機必須在100ms內同時接收到兩次該命令才認為正確,超過100ms則不予認可。
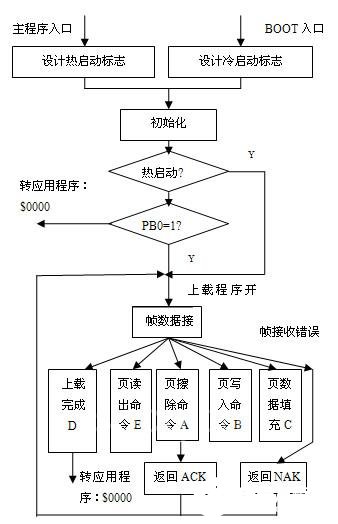
圖3
4、結束語
由于采用了MEGA8單片機的BOOT功能,以及CAN總線高速遠距離通信,同時抗干擾性強,使得遠距離在線升級,譬如通過以太網、無線等方式,成為了可能。這對于系統調試及以后的升級維護都提供了極大的便利,這也是今后單片機和CAN總線發展的一個方向。由于該部分具有通用性,所以可很容易地移植到 AVR其它MEGA系列的設計方案中。
責任編輯:gt
-
單片機
+關注
關注
6037文章
44563瀏覽量
635876 -
控制器
+關注
關注
112文章
16382瀏覽量
178319 -
局域網
+關注
關注
5文章
754瀏覽量
46298
發布評論請先 登錄
相關推薦
基于MEGA8單片機的倒計時系統的PCB曝光盒構建
關于mega8高頻使用問題
LPC2136與Mega8相互通信怎么實現?
基于MEGA8單片機的無傳感器無刷直流電機控制系統設計
基于CAN總線連接的MEGA8遠距離在線升級方案
基于ADμC812的CAN總線智能節點的設計
基于MEGA8單片機的無傳感器無刷直
基于MCS-51單片機和CAN總線控制器實現總線節點的設計






 工商網監
工商網監
評論