

前言
伺服系統(servo system)亦稱隨動系統,屬于自動控制系統中的一種,它用來控制被控對象的轉角(或位移),使其能自動地、連續地、精確地復規輸入指令的變化規律。它通常是具有負反饋的閉環控制系統,有的場合也可以用開環控制來實現其功能。在實際應用中一般以機械位置或角度作為控制對象的自動控制系統,例如數控機床等。使用在伺服系統中的驅動電機要求具有響應速度快、定位準確、轉動慣量較大等特點,這類專用的電機稱為伺服電機。基于CAN總線的分布式伺服系統多電機伺服控制廣泛應用于各種電力傳動自動控制系統中,如配料、傳動等生產過程。伺服系統中電機控制性能和多電機間協調控制的好壞直接影響生產過程的質量,如何高效管理、方便應用、實時控制是多電機伺服系統生產領域亟待解決的首要問題。CAN總線技術解決了傳統總線插板I/O模塊多,干擾嚴重、系統軟件編寫復雜、系統硬件兼容性差等問題。大大減輕了現場信號連接的繁瑣與費用,提高了信號傳輸的精度與靈活性,給安裝、調試和維護帶來諸多方便,為現場用戶帶來巨大的經濟效益,代表著自動化領域發展的一個重要方向。
一、CAN總線分布式伺服系統簡介
隨著工業現場控制和自動化技術的不斷進步,傳統的通信模式已不能滿足現代工程需要。CAN(Controller Area Network)總線是80年代初德國Bosch公司為解決現代汽車中眾多控制與測試儀器間數據交換而開發的一種串行數據通信協議,是一種性能先進、價格低廉、保密性好的現場總線(Field Bus)技術,能夠有效支持分布式控制或實時控制串行通信網絡。CAN總線中各節點都有權利向其它節點發送信息。通信介質可以是雙絞線、同軸電纜或光纖,主要技術特點有:是一種多主總線:網絡上任一個節點均可在任意時刻主動向網絡上其它節點發送信息,多主站依據優先機制進行總線訪問;非破壞性基于優先權總線仲裁技術:采用非破壞性基于優先權總線仲裁技術結構,大大節省總線沖突仲裁時間,在重負荷下表現出良好性能;具有多種傳送數據功能:具有點對點,一點對多點(成組)及全局廣播傳送數據功能;節點數目多:直接通訊距離最遠可達10km(傳輸速率為5kbps),最高通訊速率可達1Mbps(傳輸距離為40m);可靠性高:數據鏈路層采用短幀結構,實時性高,糾錯效果好,每幀信息都有CRC校驗及其它校驗措施,數據出錯率低,可靠性高;故障自動判別:發送期間若丟失仲裁或因出錯而遭破壞的幀可自動重發,暫時錯誤和永久性故障節點判別及故障節點自動脫離CAN總線。CAN總線系統由CAN網絡節點、轉發器節點和上位機構成。總線技術遵循現場總線協議,將分布在不同位置,用途各異的測量儀表、控制設備互聯成網,并可接入Intranet和Internet網絡。現場總線技術的關鍵標志是它能支持雙向多變量、總線式全數字通訊。傳統4~20mA模擬直流回路只能在一根兩芯電纜中單向傳輸一個參數,隨著系統結構的日益復雜和信息量的增加,4~20mA電流環傳輸成為制約信息傳輸的瓶頸,所以現場總線替代4~20mA模擬信號標準已成為控制系統發展的必然趨勢。
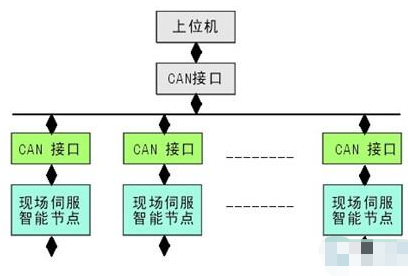
基于CAN總線技術的多電機伺服控制系統網絡結構如圖1所示,系統由上位機、CAN總線、現場伺服單元節點組成。數控系統上位機通過CAN總線控制網絡節點任一伺服單元,數字伺服與數控系統之間數據傳輸可分為實時性數據信息和非實時性數據信息兩類。實時性數據指參與控制器實時位置、速度、轉矩等控制指令和反饋信息,傳輸速度要求較高。非實時性數據主要是指控制器參數設置、功能設定、診斷功能、伺服狀態與報警等信息,傳輸速度相對較低。CAN接口適配器是上位機與伺服單元數據傳輸和控制的橋梁,伺服單元采集現場的數據通過總線傳給上位機,實現實時監視和控制。
二、模塊介紹
I-87120是***泓格生產的CAN系列產品之一,支持CAN2.0A/ CAN2.0B協議,具有1個CAN口,內置80MHz CPU,具體規格如下:
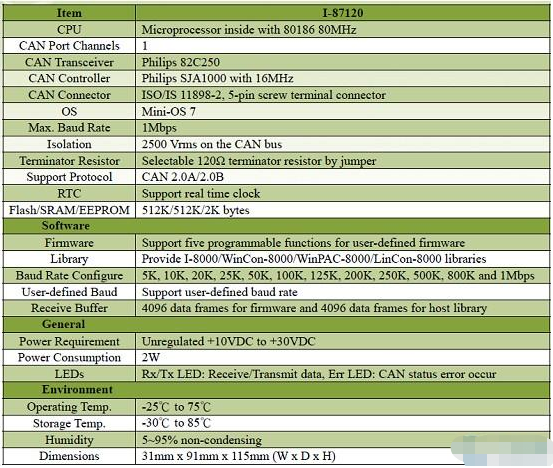
I-87120不能單獨使用,需要搭配泓格生產的PAC來使用,針對不同的PAC泓格都提供有相應的SDK,同時借助PAC強大處理能力很容易實現數據顯示、傳輸及存儲功能,大大豐富分布式伺服系統的功能,可以完成復雜數據機床的設計要求。
四、結束語
CAN總線具有良好的網絡通信功能、高可靠性、抗干擾能力強且經濟實用,是一種很有前途的現場總線技術。它的應用將為分布式伺服系統提供一種新的解決方案,會受到人們越來越多的重視。新一代的智能數字伺服系統通過CAN總線與開放式數控系統互聯,是分布式伺服系統發展的一個有前途方向。
責任編輯:gt
-
CAN總線
+關注
關注
145文章
1973瀏覽量
132219 -
電機
+關注
關注
143文章
9246瀏覽量
148307 -
伺服系統
+關注
關注
14文章
584瀏覽量
39865
發布評論請先 登錄
DSP FPGA 伺服系統技術方案轉移
AMEYA360設計方案丨交流伺服系統解決方案
TMS320LF2407A基于CAN總線技術的數字交流伺服系
基于CAN總線的分布式位置伺服系統設計

基于DeviceNet協議的伺服系統設計





 工商網監
工商網監

評論