") 利用VHDL語言和BiSS協(xié)議實現(xiàn)光電編碼器的設計
利用VHDL語言和BiSS協(xié)議實現(xiàn)光電編碼器的設計
引言
位置編碼器是工業(yè)自動控制中重要的反饋環(huán)節(jié)執(zhí)行元件。位置編碼器按工作方式分為絕對式和增量式兩種。絕對位置式編碼器的數(shù)據(jù)輸出一般采用串行通信的方式。位置編碼器的通信速度,在一定程度上影響閉環(huán)系統(tǒng)的時間常數(shù)。德國IC-Haus公司提出的BiSS(Bidirectional Synchronous Serial)協(xié)議是一種新型的可自由使用的開放式同步串行通信協(xié)議,使用該協(xié)議通信波特率可以達到10Mbps,達到RS422接口總線的波特率上限,是其它一些同類常用串行通信協(xié)議(如SSI,EnDat,Hiperface,起止式異步協(xié)議)的5倍以上。
注:起止式指一種常用的異步串行通信協(xié)議,每幀數(shù)據(jù)包括1位起始位、5-8位數(shù)據(jù)位、1(或0)位奇偶校驗位、1(或1.5或2)位停止位。

由表1中可知,BiSS協(xié)議通信波特率遠遠高出其它協(xié)議,總線連接方式、報警位、協(xié)議長度可調整,工業(yè)應用靈活性好,無協(xié)議產(chǎn)權成本,全數(shù)字接口無模擬器件成本。可見,在通信速度、產(chǎn)品適應性、成本等綜合方面,BiSS協(xié)議具有很好的發(fā)展前景。
1、BiSS協(xié)議
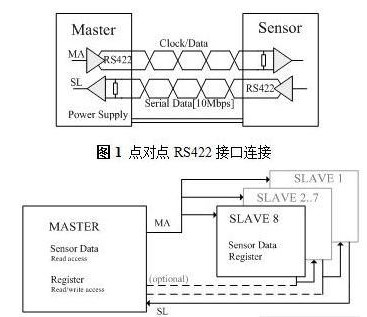
BiSS協(xié)議包括讀數(shù)模式(sensor mode)和寄存器模式(register mode)兩部分的內容。如圖1、圖2所示,在點對點或總線連接下由主機發(fā)送MA(master)信號,編碼器返回SL(slave)信號。SL的返回信號是和MA的時鐘同步的。在寄存器模式下,MA在提供時鐘的同時,需要攜帶寄存器地址、寄存器值等信息,這是通過不同的占空比實現(xiàn)的:當占空比在10%~30%(文中稱為低占空比)時,同時表示數(shù)據(jù)0;當占空比在70%~90%(文中稱為高占空比)時,同時表示數(shù)據(jù)1。
1.1 讀數(shù)模式
在讀數(shù)模式下,通信波特率可達到10Mbps,MA和SL的幀結構如圖3所示。其中,MA的REQ(請求)位的①~②時間長度要小于timeoutSENS(可編程的時間參數(shù)),編碼器識別為讀數(shù)模式。在MA的每一個時鐘上升沿,SL返回相應的數(shù)據(jù)位。
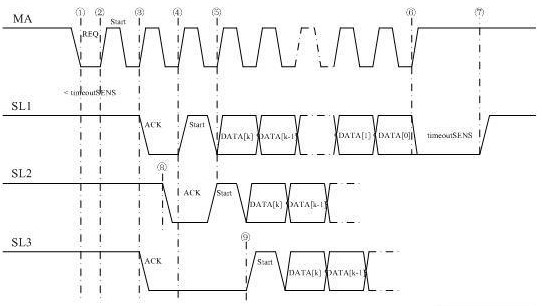
實際應用中,長距離的導線傳輸、接口電平轉換芯片等帶來的總線延時(line delay),會有SL2的延遲響應波形。由此可估計總線延時為③~⑧時間長度,即MA時鐘上升沿和SL響應位下降沿的時間長度,相應地延遲采樣時刻,使通信不受總線延時的影響。
編碼器的位置信號需要內部采集,轉換等過程。當編碼器忙不能立刻響應主機的讀數(shù)請求時,延遲響應start位,此時為SL3的波形,數(shù)據(jù)處理帶來的延時為④~⑨時間長度。
可見,在高波特率的通信狀態(tài)下,仍能通過估計總線延時和忙延時,準確的進行數(shù)據(jù)通信。
1.2 寄存器模式
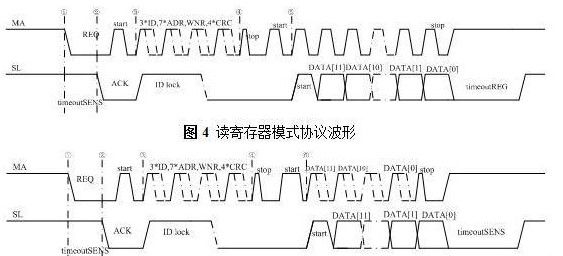
在讀寫寄存器模式下,通信波特率相對較低。文中編碼器的寄存器為EEPROM,正常工作上限波特率為250K。MA的REQ位時間長度要大于timeoutSENS,編碼器識別為寄存器模式。寄存器地址序列為③~④波形(讀寄存器、寫寄存器相同),包括3位的ID(編碼器編號)、7位ADR(編碼器地址)、1位WNR(讀寫標志位)和4位CRC(校驗位),同樣使用高低占空比來實現(xiàn)時鐘和數(shù)據(jù)的同時輸出。
主機輸出寄存器地址序列后,如果是讀寄存器模式,即寄存器地址序列中的WNR位為0,MA繼續(xù)輸出時鐘,SL返回寄存器中的數(shù)據(jù)。如果是寫寄存器模式,即寄存器地址序列中的WNR位為1,MA則繼續(xù)輸出高低占空比信號,SL返回寫入的寄存器值,如該值與發(fā)送的數(shù)據(jù)一致,說明寫寄存器操作成功。
位置數(shù)據(jù)、寄存器數(shù)據(jù)、寄存器地址后均加有CRC校驗,保證傳送數(shù)據(jù)的準確性。對于總線連接方式,BiSS協(xié)議給出了多編碼器串行連接的讀數(shù)方式和寄存器讀寫方式,是上述時序的組合。
2、通信模塊的軟硬件設計
2.1 硬件設計
通信模塊基于EP1C12Q240-FPGA設計,對Netzer RE252型號的絕對位置式光電編碼器進行位置讀數(shù),采用點對點連接,RS422差分總線接口使用MAX3460電平轉換芯片。為了提高通信模塊在工業(yè)應用中的抗干擾性,接口芯片和FPGA核心模塊之間加入高速光耦HCPL0630進行隔離。輸出接口有并行接口、串行通信接口、增量式等,與上位機通信。
2.2 軟件設計
程序在Quartus II軟件[6]環(huán)境下,使用Verilog HDL語言編寫,采用的是自底向上的編寫方式,使用約6000門資源。底層模塊包括讀數(shù)模塊、讀寫寄存器模塊。底層模塊的clk時鐘由頂層模塊的鎖相環(huán)PLL分頻提供。讀數(shù)模塊或者讀寫寄存器模塊在EN置位后,獨占MA線,發(fā)送與協(xié)議對應的波形,再根據(jù)編碼器返回的SL波形采樣識別數(shù)據(jù),通過data總線保存到頂層模塊的數(shù)據(jù)緩沖區(qū)。
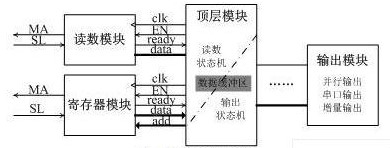
頂層模塊主要包括兩個狀態(tài)機。讀數(shù)狀態(tài)機根據(jù)編碼器的工作時序要求完成寄存器的初始化,然后不斷的讀取編碼器的數(shù)據(jù)保存到數(shù)據(jù)緩沖區(qū)。輸出狀態(tài)機根據(jù)指定標志位從數(shù)據(jù)緩沖區(qū)讀取數(shù)據(jù),控制以并行、串口、增量式的輸出時序邏輯。
3、實驗結果及對比
quartus II中的signalTap邏輯分析儀可以嵌入到FPGA,觀察管腳電平和內部變量值。圖7所示為編碼器返回14位數(shù)據(jù)的通信波形。從圖中可見,SL的第一個下降沿即ACK位延遲了約0.65μs,為總線延時。一個完整的讀數(shù)操作從-5時刻開始需要約210個采樣點,即4.2μs的時間(4.2μs=210*1/50 MHz,采樣頻率50MHz)。

圖8為*AGAWA-TS5667型號的絕對式光電位置編碼器返回17位數(shù)據(jù)的通信波形,該編碼器采用起止式異步串行通信協(xié)議,波特率為2.5M。半雙工通信方式下,一個完整的讀數(shù)操作從0時刻di請求開始,到約868時刻ro應答結束,需要約30.4μs的時間(30.4μs=868*1/28.57MHz,采樣頻率28.57MHz)。

BiSS協(xié)議下的數(shù)據(jù)位數(shù)可調整,如果把BiSS協(xié)議下的數(shù)據(jù)位數(shù)從14位增加到17位,只需增加3個時鐘的時間長度,在10Mbps下為0.3秒。
由此得到,在同樣傳輸17位光電編碼器位置數(shù)據(jù)的情況下,起止式異步協(xié)議耗時30.4μs,而BiSS協(xié)議僅耗時4.5μs,通信速度提高了6.75倍。
4、結論
基于BiSS協(xié)議的各方面優(yōu)點,目前已有德國IC-Haus,美國Danaher,以色列Netzer Precision等130多家公司申請并免費使用了BiSS協(xié)議,BiSS協(xié)議得到了越來越廣泛的應用。同時,BiSS與SSI協(xié)議下的接口兼容,方便SSI使用者和廠商系統(tǒng)升級。綜上所述,BiSS協(xié)議在降低協(xié)議成本、硬件成本,提高通信速度和準確率等綜合方面,是未來編碼器用串行通信協(xié)議中一種非常理想的選擇。
-
FPGA
+關注
關注
1629文章
21729瀏覽量
603012 -
編碼器
+關注
關注
45文章
3638瀏覽量
134428 -
vhdl
+關注
關注
30文章
817瀏覽量
128121
發(fā)布評論請先 登錄
相關推薦
5V BiSS 位置編碼器接口參考設計
5V BiSS位置編碼器硬件接口解決方案
基于FPGA的BISS-C協(xié)議編碼器的解碼實現(xiàn)
開源硬件-TIDA-00175-5V BiSS 位置編碼器接口 PCB layout 設計

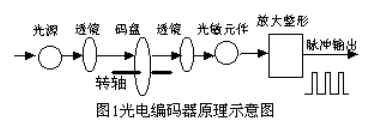
光電編碼器原理結構圖
詳解雙向/串行/同步(BiSS)位置編碼器的接口





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論