

1 引 言
EDA是現代電子系統設計的關鍵技術。硬件描述語言VHDL以其“代碼復用”(code re-use)遠高于傳統的原理圖輸入法等諸多優點,逐漸成為EDA技術中主要的輸入工具。然而,基于IEEE VHDL Std 1076-1993標準的VHDL只用于描述數字電路。因而從理論的完整性和方法的統一性方面來說,這無疑是一個缺點。為此,IEEE于1999年發布了IEEE VHDL Std1076.1標準,擴展了VHDL對模擬電路及混合信號系統的描述和仿真能力。1076標準和1076.1標準所定義的硬件描述語言,稱為VHDL-AMS。
PID控制是最早發展起來的控制策略之一,其算法簡單、魯棒性好、適用性強,廣泛應用于過程控制和運動控制中,特別適用于可建立精確數學模型的確定性系統中。
本文介紹VHDL-AMS的新概念和新特性。通過對PID控制原理進行數學分析,建立PID控制器的數學模型,實現PID控制器的VHDL-AMS行為級建模,并進行仿真分析。
2 VHDL-AMS的新特性
集總參數連續時間系統的行為描述通常是用微分/代數方程組來進行描述,即:
F(x,dx/dt,t)=0
其中F是表達式的向量形式,x是未知變量的向量形式,dx/dt是未知變量的向量形式的導數(包括一階導數和高階導數)。在VHDL-AMS語言中新增的第一個概念是用于定義表示微分/代數方程組中的未知量的關鍵字量(Quantity)。量是浮點的標量類型,在VHDL-AMS中可以在任何可以用信號signal描述的地方出現。
VHDL-AMS中新增加的第二個概念是端點(terminal),用于定義守恒系統端口的端點及內部的端點。端點可以在任何可以用信號signal描述的地方使用,而且端點還可以作為實體的接口允許在PORT語句中使用。
IEEE Std VHDL 1076.1補充了一類新語句,即用于描述連續系統行為的聯立語句。聯立語句的格式為:
[標號:]表達式==表達式
聯立提供了表示微分/代數方程的方法,可以直接描述系統輸入、輸出間的關系或守恒系統中的支路方程。通過求解聯立語句中的微分/代數方程組,從而解出滿足方程組的量的解。
另外,在VHDL 1076的基礎上,VHDL-AMS新增了16種預定義屬性,可以分為四類:數據類型類、容差類、量類和信號類。這些新增的預定義屬性使得VHDL-AMS具有更為強大的行為描述能力。例如,預定義屬性LTF(num,den)/ZTF(num,den)用于建立模擬/離散量的Laplace/Z域傳遞函數,其中num、den分別為分子、分母多項式的系數。LTF/ZTF屬性對主要以傳遞函數為分析和設計的控制系統建模變得非常方便。
3 VHDL-AMS控制系統分析和設計的應用
在模擬控制系統中,控制器最常用的控制規律是PID控制。模擬PID控制系統原理框圖如圖1所示。系統由模擬PID控制器和被控對象組成。
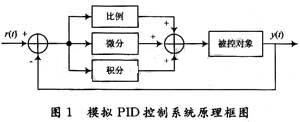
PID控制器主要由三部分組成:比例環節,積分環節和微分環節。其中比例環節反映控制系統的偏差信號e(t),偏差一量產生,控制器立即產生控制作用,以減少偏差;積分環節主要用于消除靜態誤差,提高系統的無差度;微分環節反映偏差信號的變化趨勢,并能在偏差信號變得太大之前,在系統中引入一個有效的早期修正信號,從而加快系統的動作速度,減少調節時間。
PID控制器是一種線性控制器,根據給定值r(t)與實際輸出值y(t)構成控制偏差:
e(t)=r(t)-y(t) (1)
PID的控制規律為:

式中kp為比例系數;TI為積分時間常數;TD為微分時間常數。
將式(2)寫成傳遞函數的形式:
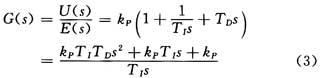
設定忌kP=60,TI=60,TD=0.05,由式(3)可對PID控制器建模如下:
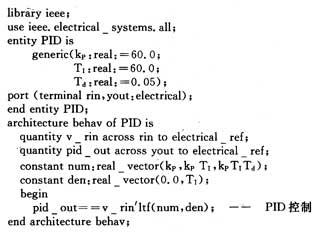
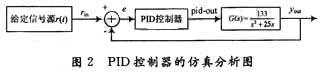
SystemVision是Mentor Graphics公司開發的支持VHDL-AMS的Windows集成開發環境。在SystemVision環境下,由文中的VHDL-AMS程序建立PID控制器模型,并以二階線性傳遞函數為被控對象,建立圖2所示的仿真分析系統。
設給定信號r(t)=Asin(2πft),其中A=1.0,f=0.2 Hz,仿真時間為50 S。仿真得到PID控制器的正弦響應波形如圖3所示。
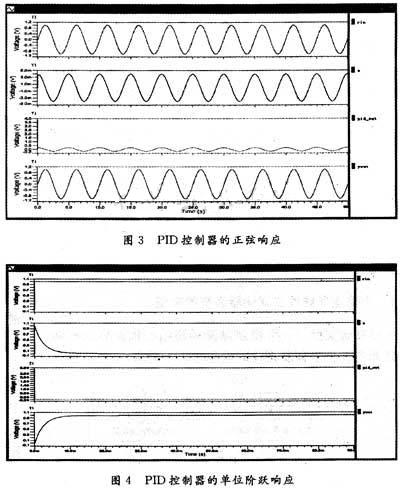
設給定信號r(t)為單位階躍信號ε(t),仿真時間為0.1 S。仿真得到鎖相環的波形如圖4所示。
由仿真結果可以看出,PID控制器控制過程快速、準確、平穩,具有良好的控制效果。還可進一步調整PID參數,分析相關參數對控制性能的影響。
4 結 語
VHDL-AMS突破了VHDL只能設計數字系統的限制,在控制、機電等多域系統(Multl_descriplinessystems)分析與設計中應用越來越廣,特別是在以傳遞函數為系統分析與設計工具的控制系統中應用簡捷方便。隨著VHDL-AMS綜合技術的突破,VHDL-AMS將會逐步取代VHDL,在電子工程設計和多域系統設計領域發揮越來越重要的作用。
-
控制器
+關注
關注
114文章
17028瀏覽量
183349 -
控制系統
+關注
關注
41文章
6768瀏覽量
111896 -
仿真
+關注
關注
51文章
4250瀏覽量
135458
發布評論請先 登錄
基于VHDL-AMS的巴特沃斯二階濾波器行為建模與仿真(smash5.51)
基于MATLAB的異步電機特性仿真與分析
混合信號系統的VHDL-AMS建模與仿真分析
電荷泵鎖相環的VHDL-AMS行為建模與仿真
VHDL密碼控制系統的設計
步進電機定位控制系統VHDL程序與仿真
VHDL-AMS格式熱電聯合仿真
PADS Professional中的原理圖AMS仿真如何確保正確的設計意圖
用于功率 MOSFET 的 SPICE 和 VHDL-AMS中的 Nexperia 精密電熱模型-AN90034

用于功率MOSFET的SPICE和VHDL-AMS精密電熱模型
AN90034用于功率MOSFETs的SPICE和VHDL-AMS中的Nexperia精密電熱模型





 工商網監
工商網監

評論