 基于FPGA技術與超聲波測速測距系統實現智能導盲犬設計
基于FPGA技術與超聲波測速測距系統實現智能導盲犬設計
引 言
隨著信息化和數字化的發展,現在社會中人們的生活變得更加豐富多彩,生活更加便利。但是有一種人群卻不容忽視,社會上形形色色、豐富多彩的物是與他們無緣的,他們就是盲人。眾所周知眼晴是“心靈之窗”,而對于突然失去或從未擁有過“心靈之窗”的盲人來說,生活上的困難與心理上的痛苦是可想而知的。他們的衣食住行存在諸多不便,而在出行與人際交往中遇到的困難更加突出,基于此設計了智能導盲犬。生活中,導盲犬習慣于頸圈、導盲牽引帶和其他配件的約束;懂得“來”、“前進”、“停止”等口令;可以帶領盲人安全地走路,當遇到障礙和需要拐彎時,會引導主人停下以免發生危險。但是,導盲犬的培訓過程長達18個月,綜合費用達2.5~3萬美元,如此昂貴的價格不是普通用戶能承擔的,所以這里設計一個智能導盲犬,從而為盲人帶來便利。
本系統主要解決的是盲人在出行和人際交往中遇到的問題,主要功能有:行進中的障礙物檢測、識別與定位,其中包括移動的物體與靜止的物體識別;測定障礙物的速度與距離;對周圍的路線的特定環境標志進行環境辨認,檢測出熟悉的地點,方便盲人了解情況,并同時也以此為信息主動控制導盲犬,實現人的主觀控制;人性化的語音提示,能夠根據信息重要程度主動提示當前情況,幫助盲人獲取必要信息,幫助盲人決策;系統還可以對周邊環境發生的特殊情況向家屬發送短消息,必要時可以發送圖片,實現進一步的安全性。
1 設計結構
本設計系統通過數據采集、處理、存儲、反饋等子系統構架而成。首先由兩路信息采集系統——超聲波測速測距系統及圖像采集系統采集外部環境信息,經決策處理系統對信息進行處理,并進行多模塊輸出,其中有信息的反饋系統可以面向使用者提供足夠的信息提示,同時,又可通過運動系統對“導盲犬”進行實時控制。存儲系統可以將采集和處理的環境信息進行存取,方便查詢。
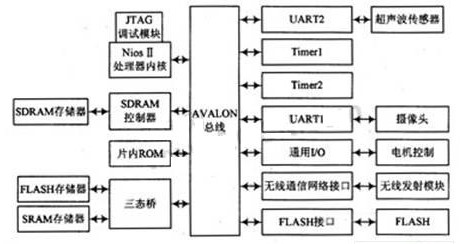
1.1 系統的體系結構
圖1為系統的體系結構圖。

1.2 硬件設計結構
本設計主要功能模塊有:
攝像頭監測及智能識別模塊,超聲波測速與測距模塊,電機驅動與控制模塊,NiosⅡ處理器模塊,語音播報模塊,通信與定位模塊,實時存儲模塊,即插即用液晶顯示模塊。
硬件框架圖如圖2所示。
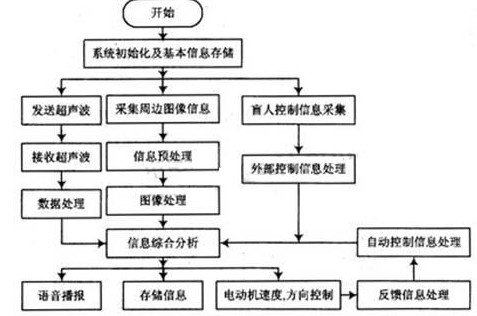
1.3 軟件流程結構
軟件流程結構如圖3所示。
2 具體模塊
本設計基于NiosⅡ硬件平臺,運用其強大的擴展及處理功能,將數字圖像處理技術、超聲波測距定位技術、智能控制技術協調的組合在一起,構成一個既功能強大又非常人性化的“導盲犬”。以下為各模塊的設計特點及方法:
2.1 NiosⅡ處理器
NiosⅡ處理器運算速度快,能滿足對圖像檢測與處理的要求;具有完善的軟件開發套件,包括編譯器、集成開發環境(IDE)、JTAG調試器、實時操作系統(RTOS)和TCP/IP協議棧;其次,Altera DEl的外圍接口豐富,可以滿足不同的需求,必要時可以自定義外圍電路進行擴展。在FPGA中使用軟核處理器也是其優勢所在,硬核實現沒有靈活性,通常無法使用最新的技術。基于標準處理器的方案會被淘汰,而基于NiosⅡ處理器的方案是基于HDL源碼構建的,能夠修改以滿足新的系統需求。將處理器實現為HDL的IP核,開發者能夠完全定制CPU和外設,獲得恰好滿足需求的處理器。
2.2 圖像采集模塊
利用的地貌比對是對被檢測到的環境特征在環境圖像庫中進行目標搜索以及進行地點的確認。實際上,將采樣到的環境圖像與庫存的圖像依次進行比對,并找出最佳的匹配對象。所以,環境的描述決定了環境識別的具體方法與性能。該應用的核心是“圖形識別算法”,這種算法是利用了環境中的各主要特點及一些特征部分而形成的方法。
圖像采集系統主要由視頻信號A/D轉換,PFGA控制模塊,邏輯控制模塊,存儲模塊等組成。系統采集圖像的命令由計算機發出,通過Avalon總線將命令傳送至FPGA同步采集模塊。同步采集模塊則發出采集信號采集一幀圖像,利用寫信號將數據存儲至SRAM1中。經過邊緣檢測處理后存儲到SRAM2中,將圖像信息讀出傳送給FPGA至處理。對比FPGA中環境圖片的數據庫的數據與當前圖像數據,對數字信息進行分析,在合理誤差范圍之內,可確定特定的位置,達到環境識別的目的。
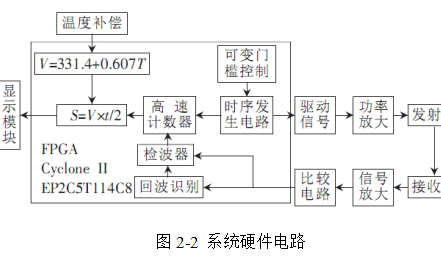
2.3 超聲波測距模塊
利用超聲波測距模塊可實現多障礙物的定位及運動狀態的跟蹤,可以精確地測出物體距離盲人的距離、物體相對于盲人的運動方向及運動速度。由于超聲波測距誤差是由超聲波的傳播速度誤差和測量距離傳播的時間誤差引起的。而超聲波的傳播速度的誤差影響最大,且其與環境的溫度有關,故本設計中采用了帶溫度補償的超聲測距,通過高精度的溫度傳感器實時跟蹤外界溫度的變換,能很好地補償超聲波在不同溫度的傳播速度。而傳播時間的誤差則通過NiosⅡ來消除,NiosⅡ內部具有高頻晶振信號,通過其內部計數器計數可以滿足超聲波測距的微秒級要求,能保證測距1 cm的誤差。
2.4 電機控制模塊
本設計中用到的電機為直流電機,控制著導盲儀的運動,以及超聲波傳感器的循環掃描和攝像頭的動態攝取,運用工程整定方法,通過試驗,然后按照工程經驗公式對控制器參數進行整定,由控制器輸出控制各個電機協調運動,可以實現導盲儀的自動運動及多個超聲波測量儀的平面覆蓋式掃描,消除掃描中的死角。測速電路用于測量導盲小車的速度,反饋電路輸出控制調速系統可控制預先設定的速度。
2.5 短信息發送功能
能夠將盲人遇到的情況的描述自動發送給其家人。短信息的發送需要GSM模塊和FPGA處理器共同協作完成。發送中文短信采用PDU模式Unicode編碼方式,將所要發送的信息存儲在SIM卡中。發送過程中,FPGA通過發送及接收AT命令與GSM模塊形成回路,通過AT命令實現對GSM模塊的操作。通過簡單的按鍵分配各個對應的信息內容,能夠使不同的信息通過短信息模塊發送。
3 結 語
本設計基于FPGA技術在Altera公司的DEl開發平臺進行開發,設計中需要大量進行實時圖像處理,波形處理,以及多個進程的并行處理,對處理器的性能要求比較高,而基于Altera NiosⅡ可以很好地滿足算法的速度和精度的雙重要求。同時豐富的IP盒可供直接使用,方便高效。在設計構架過程中,需要將Avalon總線上各個IP的時序進行綜合,方便FPGA處理器進行處理,避免錯誤和損失。同時,如何提高導盲系統的魯棒性也是一個值得解決的有意義的工作。 (房 鑫 山東大學 信息科學與工程學院)
-
FPGA
+關注
關注
1630文章
21761瀏覽量
604390 -
數據采集
+關注
關注
39文章
6176瀏覽量
113790 -
超聲波
+關注
關注
63文章
3027瀏覽量
138485
發布評論請先 登錄
相關推薦
超聲波測距原理
勇敢的芯伴你玩轉Altera FPGA連載73:基于SignalTap II的超聲波測距調試之超聲波測距原理
基于STM32超聲波測距設計的合集
多點超聲波測距報警系統
超聲波傳感器測距原理是什么
利用超聲波測距來實現報警的功能
基于單片機的超聲波測距系統實現
基于STM32的超聲波測距系統設計
什么是超聲波測距?有何特點
超聲波測距技術方案匯總
如何使用FPGA進行超聲波測距系統的設計





 工商網監
工商網監
評論