 利用80C196單片機設計SRD驅動系統
利用80C196單片機設計SRD驅動系統
引言
開關磁阻電動機是磁阻電動機與電子開關驅動控制器組成的控制裝置,又稱開關磁阻電機驅動系統(Switched Reluctance Motor drive,簡稱SRD)。電機結構簡單堅固,運行可靠,系統具有啟動轉矩高、啟動電流低、調速范圍寬、運行效率高,特別適用于頻繁啟停及正反轉運行,使得SRD成為交,直流電機驅動系統以及無刷直流電機驅動系統的強有力競爭者。目前,SRD已用于多個領域,如:電動車驅動、家用電器、伺服與調速系統等許多領域。
本文設計了一個以80C196單片機為控制核心的SRD的控制系統,充分利用了SRD電機控制方式靈活的特點,采用數字化控制系統對SR電機進行控制,簡化了硬件電路,提高了系統的可靠性。
2 SR電機工作原理
SR電機運行原理遵循磁阻最小原理——磁通總要沿著磁阻最小的路徑閉合,因磁場扭曲而產生切向的磁拉力,當具有一定形狀的鐵心在移動到最小磁阻位置時,必使自己的主軸線與磁場的軸線重合。典型的SR電機結構原理如圖1所示。
具體過程如下:當A相繞組電流控制開關S1,S2閉合時,A相勵磁,所產生的磁場力使轉子旋轉到轉子軸線與定子軸線重合的位置,從而產生磁阻性質的電磁轉矩。順序給A-B-C-D相繞組通電(B、C、D各相繞組在圖中未畫出),則轉子便按逆時針方向連續轉動起來。反之,依次給B-A-D-C相繞組通電,則轉子會按順時針方向轉動。
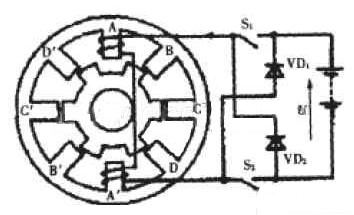
圖1 SR電機結構原理圖
由于是磁阻性質的電磁轉矩,SR電機的轉向與相繞組的電流方向無關,僅取決于相繞組的通電順序,這使得能夠簡化功率變化器電路,當S1或S2閉合時,A相繞組從電源上吸收電能,而S1或S2斷開時,繞組電流通過二極管VD1、VD2將剩余能量回饋給電源,因此SR電機具有能量回饋的特點,系統效率高。
2 SRD系統硬件設計
2.1系統基本組成
SRD系統主要由四部分組成:開關磁阻電機、功率變換器、控制器及傳感器。它們之間的關系如圖2所示。
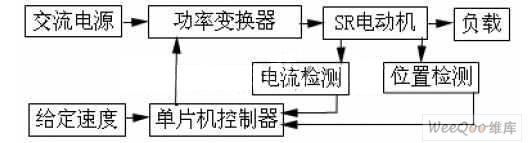
圖2 SRD基本組成結構圖
SR電動機是整個系統的執行部件,采用雙凸極結構的磁阻的電機、功率變換器向SR電動機提供運轉所需要的能量,位置檢測器是轉子位置及速度等信號的提供者,控制器是系統的中樞,它綜合處理速度指令、速度反饋信號及電流傳感器、位置傳感器的反饋信號,從而控制功率變換器中主開關器件的工作狀態,實現對SR電動機運行狀態的最終控制。
2.2 功率變換電路
本文采用的是四相8/6極磁阻電動機作為系統控制的實驗平臺,功率電路采用H型的功率電路,如圖3所示。A,B,C,D為SR電機的四相繞組,VD1~VD4為續流二極管,AB,CB,CD,AD兩相同時導通,循環導通工作。若V1,V3同時導通,則A,B相通電。若V1關斷,V2閉合,則A相關斷,C相開始導通,此時,A相繞組將通過二極管VD1續流,C相繞組也將構成回路,使B相電流增大,中性點電位必然增高,促使A相續流迅速衰減,強行換相。緊接著關斷V1,開通V4,則C,D相導通,依次循環導通,電機就連續工作起來。其*率開關用PWM控制信號通過驅動電路來進行控制其通斷。
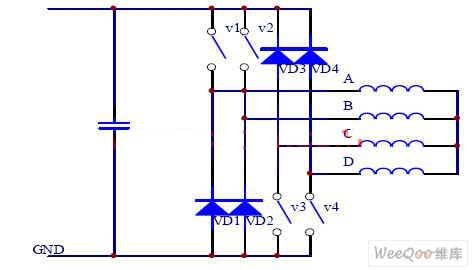
圖3 功率電路原理圖
2.3控制電路結構
控制電路部分主要包括80C196單片機,角度位置檢測電路,顯示鍵盤電路以及接口電路。在控制電路中,單片機是核心,負責執行指令、處理數據。角度位置檢測電路通過光電傳感器檢測轉子位置,并將位置信號處理好后送給功率變換器和顯示電路部分顯示系統信息。8279接口電路負責CPU和顯示鍵盤部分的信息交換。系統處于工作狀態時,用戶通過鍵盤給定轉速,單片機接收到轉速指令后通過與實際測的速度相比較,通過內部設定的控制算法輸出一個占空比可調的PWM信號,這個PWM信號使得在SR電機的相繞組兩端電壓的變化,從而實現調速的目的。
3 SRD系統軟件設計
系統軟件主要由單片機處理軟件和PC上位機控制軟件組成。
3.1 單片機軟件設計
開關磁阻電機控制軟件以控制系統硬件為依托。完成對位置信號,輸入給定信號及當前運行狀態的檢測,進行判斷和計算,輸出合適的電流控制與換相控制信號。它由前臺程序和后臺程序組成,如圖4所示。其中后臺程序包括初始化程序,鍵盤掃描程序,調速控制程序,顯示程序,閑時循環程序。前臺程序由四個中斷程序組成,它們位置中斷程序、軟件定時器中斷,外部中斷及串行口中斷程序。
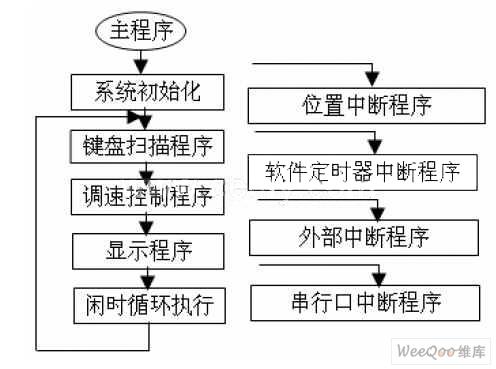
圖4 開關磁阻電機控制程序流程
初始化程序完成有關單元初始化,選擇外部接口的工作方式,CPU各部分功能部件初始化,開啟中斷等,使整個系統處于準備運行狀態。鍵盤掃描程序檢查鍵盤的輸入情況,并進行相應的軟件去抖動處理,當確實有鍵按下時進行相應的判斷,如正轉、反轉、制動。調速控制程序根據給定速度,并根據電機的狀態完成電機的啟動與制動,當在運行時根據速度的偏差輸出相應的PWM信號。顯示程序主要完成電機在面板控制方式下的信息顯示。電機啟動前閃爍顯示給定轉速,啟動后給定實際轉速,運行過程中若出現故障,則顯示故障性質代碼。閑時循環程序由電源檢測程序、硬件故障檢測、故障處理及對上位機的命令分析程序組成。
位置中斷程序即兩個位置傳感器輸出的方波信號的上升沿和下降沿均引起中斷,即電機每轉過15°就產生依次中斷。該程序主要完成運行速度檢測、換相控制以及運行模式的切換。定時器中斷實現主循環定時,電流采樣,電流斬波等功能。而外部中斷程序則實現外部鍵盤輸入功能。串行口中斷則是實現上位機與單片機之間的通信。
系統的工作過程如下:當單片機接到啟動命令時,,在檢測系統狀態一切正常的情況下,根據位置傳感器所提供的轉子的位置信號,按啟動邏輯給出相應的輸出信號,該信號通過功率變換器向電機繞組供電,使電機開始轉動。當轉子轉過一定角度時,控制電路根據位置傳感器信號的變化通過功率變換器使電動機通電相位改變。運行時,根據給定速度與實際速度之間的誤差輸出占空比可以調節的PWM控制信號。當操作命令改變時,如反轉,停車,制動時,控制電路再次改變工作邏輯,通過功率變換器使電動機實現操作要求。若在運行中出現故障情況,控制電路將通過關斷功率變換器實現保護,并且通過顯示電路顯示故障代碼。
2 PC機軟件設計
系統上位機控制軟件使用VB語言開發,它的作用是通過串口命令控制單片機工作,并顯示實際運行轉速。應用該軟件,可以實現PC機對電機的正轉、反轉、停車、制動以及給定具體轉動速度。軟件的運行界面如圖5所示。

圖5 軟件運行界面
4 小結
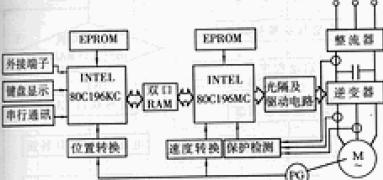
本系統采用80C196KC16位單片機為核心,配以8279等外圍接口芯片構成檢測、給定、顯示、保護等外圍電路,再加上驅動電路、主電路及磁阻電動機構成完整的SRD系統。對一臺2KW的開關磁阻電機進行調速實驗,實驗結果表明開關磁阻電機的結構簡單堅固、調速范圍寬、調速性能優異、而且在整個調速范圍內都具有很高的效率,系統可靠性高,達到了設計的要求。
-
單片機
+關注
關注
6035文章
44554瀏覽量
634653 -
控制器
+關注
關注
112文章
16332瀏覽量
177812 -
電機
+關注
關注
142文章
9001瀏覽量
145339
發布評論請先 登錄
相關推薦
80C196單片機是不是壞了
80C196 單片機和CPLD在光電軸角編碼器中的應用
基于80C196單片機的模糊控制系統
基于80C196KC單片機的F/V 轉換器的設計
基于單片機的開關磁阻電機驅動系統設計
基于80C196單片機的角位移智能測量系統研究
基于PC機和80C196單片機的溫度微機控制系統
基于80C196KC和80C196MC雙單片機的通用伺服控制
基于80C196的頻率測量及在電壓采樣中的應用
基于80C196的頻率測量及在電壓采樣中的應用
TMS320C31和80C196雙CPU構成的高速實時控制系
串行AD轉換器TLC2543與80C196的接口及編程

80C196單片機
基于80C196單片機和CAN總線的全數字電動執行器的設計





 工商網監
工商網監
評論