 Bootloader技術的原理及在dsPIC30F系列數字信號控制器的應用
Bootloader技術的原理及在dsPIC30F系列數字信號控制器的應用
1 引 言
當前, 隨著MCU、DSP等高性能集成電路的廣泛應用, 大部分電子設備需要對用戶程序進行升級以達到完善、豐富系統功能的目的。但目前對這類設備的程序升級大多采用開發人員攜帶編程工具到現場進行操作的方式, 這樣做給系統的統一管理和維護造成很大困難。針對這一問題提出一種基于dsPIC30系列芯片應用Bootloader技術實現用戶程序在線自編程升級的方法, 從而達到了用戶程序升級時無須下載器, 操作簡單、快捷的目的。
2 Boo tloader的原理
Bootloader相當于PC主板上的B IOS, 是最底層的引導軟件。Boo tloader是一段固化在嵌入式系統目標系統ROM或者是諸如FLASH 等非易失存儲器中的一段程序, 它的主要作用就是引導操作系統或用戶程序的運行。系統上電后Boo tloader將首先接管系統, 在進行一些最基本的上電自檢后, Bootloader將對系統的硬件進行初始化, 為引導操作系統作好準備, 接下來, Bootloader需要將操作系統的代碼拷貝到主存儲器的特定地址, 最后Boot loader將控制權交給操作系統, 由操作系統完成接下來的工作;在不含操作系統的系統中, Bootloader可以完成這樣一些操作: 分配程序存儲空間; 重新映射復位和中斷向量; 將程序代碼從片外加載到程序區, 執行時再將代碼加載到RAM 中以便快速執行; 檢測是否需要下載新的用戶代碼, 若需要則通過某種通信方式接收新代碼并將其寫入指定程序存儲空間中, 若不需要, 則執行原有用戶代碼。
在嵌入式領域中, Bootloader是嚴重地依賴于硬件的, 因此想要建立一個通用的Bootloader 幾乎是不可能的。以dsPIC30F系列數字信號控制器為例,深入討論在該系列芯片中編寫Boot loader程序的方法, 這種方法同樣適用于一些其它類型的微控制器。
3 Bootloader的操作模式
大多數Bootloader 都包含兩種不同的操作模式: “啟動加載 ”模式和“下載”模式, 這兩種模式的定義如下:
啟動加載( Boot Load ing)模式: 這種模式也稱為 自主 ( Autonomous)模式。也即Bootloader從目標機上的某個固態存儲設備上將用戶程序加載到RAM 中運行, 整個過程并沒有用戶的介入。這種模式是Boo tloader的正常工作模式。
下載( Dow nloading) 模式: 在這種模式下, 目標機上的Bootloader將通過串口等通信手段從PC 機下載文件, 比如: 下載內核映像和根文件系統映像等。從PC機下載的文件通常首先被Bootloader保存到目標機的RAM中, 然后再被Bootloader寫到目標機上的FLASH類固態存儲設備中。Boo tloader的這種模式通常在系統程序更新時使用。工作于這種模式下的Boot loader通常都會向它的終端用戶提供一個簡單的接口。
4 dsPIC30F系列芯片簡介
M icroch ip公司推出的dsPIC30F 系列數字信號控制器( DSC)可以靈活地運行一個常駐FLASH 的引導加載程序( Bootloader Prog ram )實現對用戶程序的在線自編程升級。可以使用任何可用的數據接口和相關協議讀取代碼, 然后將代碼寫入(編程)到FLASH 存儲器中, 從而實現電子設備在線自編程升級程序代碼的目的。dsPIC30F系列數字信號控制器的Boo tloader程序需要自行編寫, 并且可以通過SPI、UART等各種數據接口來接收PC 機發送的數據。顯然, 采用了串口( RS232 方式) 與PC 機進行通信最為方便。
5 dsPIC30F系列芯片FLASH 存儲器的運行時自編程( RTSP)
dsPIC30F系列數字信號控制器內部包含了用于執行用戶代碼的FLASH 存儲器。用戶可以使用兩種方法對此存儲器編程:a運行時自編程( Run-T ime Self Programm ing, RTSP ); b 在線串行編程( In- C ircu it Serial Programm ing, ICSP)。其中RTSP方式是由用戶軟件執行的, 允許用戶代碼修改閃存程序存儲器的內容, 是實現用戶程序在線自編程升級的基礎。
dsPIC30F系列芯片對FLASH 存儲器的運行時自編程是通過表指令TBLWT、TBLRD 和NVM 寄存器實現的。FLASH 存儲器是由行和板構成的。每行由32 條指令( 96 字節) 組成。通常, 每個板由128行組成( 4K # 24條指令)。RTSP可以讓用戶每次擦除一行( 32條指令)以及一次編程32條指令。
程序存儲器的每個板包括能夠保存32條編程數據指令的寫鎖存器。這些鎖存器不是存儲器映射的。
用戶訪問寫鎖存器的惟一方法是使用寫表指令。在實際編程操作前, 必須先用寫表指令將待寫數據裝入板寫鎖存器。待編程入板的數據通常是按以下順序裝入寫鎖存器的: 指令0, 指令1, 依此類推。所有的32位寫鎖存器必須在編程操作期間寫入, 以確保覆蓋保存在鎖存器中的舊數據。
RTSP編程的基本步驟是先建立一個表指針, 然后執行一系列TBLWT 指令以裝入寫鎖存器。編程是通過將NVMCON 寄存器的特殊位置1 進行的。
需要將32條TBLWTL和32 條TBLWTH 指令裝入四條指令。如果需要對多個不連續的程序存儲器區進行編程, 應該為每個區域和下一個要寫入的一組寫鎖存器修改表指針。
6 Bootloader程序編寫
6. 1 dsPIC30F系列器件存儲空間的分配
在編寫Bootloader程序之前, 我們必須首先了解芯片的程序存儲空間分配情況。dsPIC30F 系列芯片包含144K字節的FLASH 程序存儲空間, 尋址范圍為0x0000100~ 0x017FFE, 圖1 ( a)為dsPIC30F系列芯片的程序存儲器地址映射情況。
0x00~ 0x03地址單元是復位向量; 0x04~ 0xFE地址單元是中斷向量表和后備中斷向量表( IVT /A IVT) ; 在其后的0x100~ 0x17FFE單元為48K指令字的用戶閃存程序存儲器。原則上, Boot loader程序可以放在整個程序空間中的任何位置, 但是為了簡單方便、具有通用性和盡量減少對用戶程序的影響,本設計使用了0x100 ~ 0x4FE 的一段程序存儲器( Boo tloader程序與用戶程序的代碼總量不能超過144KB)。Bootloader程序后面便可存放用戶程序,但是受到FLASH 存儲器頁的限制, 用戶程序不可緊跟在Boo tloader程序之后, 它必須從下一個FLASH存儲器頁的開始處(如0x500) 存放, 如圖1 ( b) 所示。
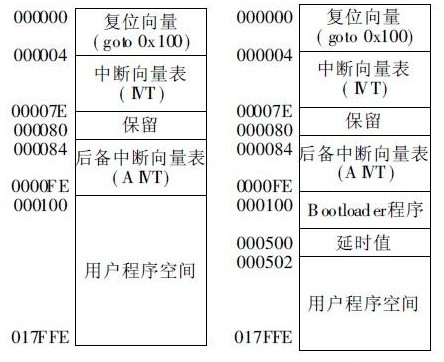
圖1 程序存儲器地址映射
6. 2 . hex文件的解析
當dsPIC30F系列數字信號控制器的程序編寫完成之后, 利用開發平臺MPLAB IDE編譯后會生成一個. hex 文件, 將這個. hex 文件燒寫到FLASH 存儲器中系統才能運行, 因此要完成的任務就是將這個. hex 文件下載到目標系統中。如果直接從PC 端將. hex 文件中的全部內容發送給下位機, 就需要Boot loader程序來解析提取要寫入存儲器的數據, 這樣做勢必加大Boo tloader程序代碼長度, 也會影響整個Boo tloader過程的時間, 因此本設計采用在PC機端程序解析. hex 文件的方法。為了正確地將這個. hex文件下載到下位機中必須對. hex 文件有一個比較深入的了解。. hex文件的格式如下:
: BBAAAATTHHHH……HHCC
BB: 二位16 進制值, 表示該幀數據的字節長度。
AAAA: 四位16 進制值, 表示隨后數據的起始地址, 該地址為字節地址。
TT: 二位16進制值, 表示數據幀類型( 00 : 數據幀; 01 : 結束幀; 04 : 擴展地址幀)。
HH: 16進制值, 表示具體的數據, 即具體程序代碼。
CC: 二位16進制的校驗碼, 使該幀全部以二位16進制相加后總和為0。
一個. hex 文件可分為5部分代碼: 復位向量代碼、程序代碼、中斷向量代碼、后備中斷向量代碼和結束代碼, 除結束代碼僅含結束幀外, 其余各部分代碼都由擴展地址幀和數據幀組成, 其中僅數據幀存儲了用戶程序信息。因此PC 機端程序僅保留擴展地址幀和數據幀的內容并按順序進行發送即可, 下位機接收數據后根據擴展地址幀可以直接將用戶代碼寫入FLASH 存儲器相應的地址單元中, 從而提高了整個Bootloader的效率。
6. 3 dsPIC30F器件. g ld文件的修改
Bootloader程序運行時, 需要讀出用戶程序中預先設置好的一個延時值(本設計為1s) 作為下位機等待PC 機發送升級命令的周期, 還要指定用戶程序起始地址以便Boot loader程序執行完畢后可以繼續執行用戶程序。為了滿足這兩個要求, 必須修改用戶程序的鏈接文件( . g ld文件), 以指定用戶程序的起始地址和Bootloader 程序的延時周期。對于. g ld文件的具體修改如圖2所示。
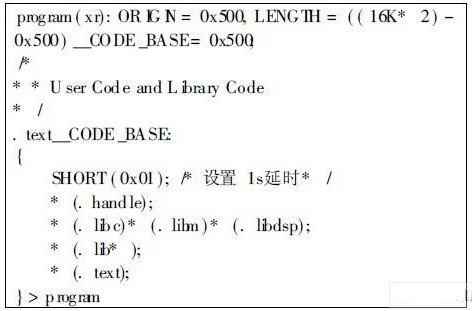
圖2 . g ld文件的修改。
6. 4 Boot loader程序流程:
系統上電復位后, 在完成各種初始化配置后首先判斷0x500地址單元中值是否為0xFF, 如果是,則說明系統從未下載過用戶程序, 系統會一直運行Boot loader程序等待PC 機發送下載命令; 如果0x500中的值不是0xFF, 則說明系統中已經下載過用戶程序了, 這時候根據0x500中的值來設置定時器T imer2的初值并開始計時, 如果UART2 在指定的自舉周期內未接收到PC 機發來的下載命令(說明系統不需要下載程序), 系統會自動跳出Boo tloader程序而去運行已有的用戶代碼, 如果UART2在自舉周期內接收到了下載命令, Boo tloader程序會進入循環狀態等待PC機發送數據。如圖3所示。
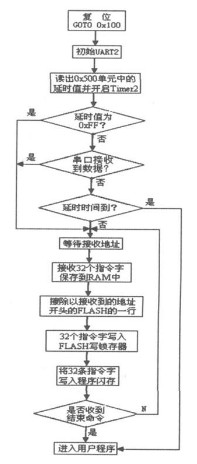
圖3 程序流程圖。
如前文所述, PC 機發送的數據是從. hex 文件中提取的, PC機首先發送擴展地址部分, 下位機接收保存后會繼續等待接收32個指令字( 96字節)并保存到RAM 中, 然后根據接收到的地址擦除FLASH 存儲器中的1行, 擦除FLASH 是通過調用匯編函數E raseMem來進行的, 函數原型如下:
mov# 0x4041, NVMCON ; 使NVMCON 寄存器為擦除FLASH模式
mov # 0x55, W 0
movW0, NVMKEY
mov # 0xAA, W0
movW 0, NVMKEY ; 將0x55、0xAA 寫入密鑰寄存器
bsetNVMCON, #WR ; 開始擦除
nop
nop
return
擦除FLASH存儲器的一行后需要把接收到的32個指令字寫入到FLASH 存儲器寫鎖存器中, 這一過程可以通過函數W riteLatch 實現, 函數原型如下:
movW0, TBLPAG ; 寫表寄存器
tb lw tlW3, [W1]
tb lw thW2, [W1] ; 寫入鎖存器
return
這一步完成之后就可以將接收到的32個指令字寫入FLASH 存儲器了, 其方法與擦除FLASH 類似, 寫完一行后向PC 機發送應答。待FLASH 存儲器全部寫完之后, PC 機會發送表示結束下載的命令, 下位機接收后退出Boo tloader程序, 進入新的用戶程序繼續運行, 從而完成整個在線自編程過程。
7 結束語
dsPIC30F 系列數字信號控制器應用Boot loader實現用戶程序在線自編程升級的方法具有很高的應用價值, 尤其是應用于自主開發的工業自動化儀表時給用戶程序的現場升級帶來了極大的方便。該方法已經成功用于電子皮帶秤控制儀表系統中, 達到了提高系統軟件升級的更換效率、降低升級費用、提高產品制造商對用戶的服務質量滿意度的目的。方法雖然僅以dsPIC30F系列芯片為例, 但對于M icrochip公司生產的其它系列芯片只要略加修改同樣適用。
-
芯片
+關注
關注
456文章
50967瀏覽量
424907 -
控制器
+關注
關注
112文章
16404瀏覽量
178625 -
數字信號
+關注
關注
2文章
973瀏覽量
47596
發布評論請先 登錄
相關推薦
SM320F28335-HT數字信號控制器(DSC)數據表

Microchip發布dsPIC33A系列數字信號控制器
TMS320F2833x、TMS320F2823x數字信號控制器(DSC)TMS320C2834x Delfino微控制器數據表
SM320F28335-EP數字信號控制器(DSC)數據表
Microchip推出dsPIC33A系列數字信號控制器(DSC)
數字信號采集器的作用是什么 數字信號采集器的特點
數字信號處理器的特點、作用及種類
Microchip推出基于dsPIC? DSC的新型集成電機驅動器將控制器、柵極驅動器和通信整合到單個器件

Microchip推出基于dsPIC數字信號控制器的新型集成電機驅動器系列






 工商網監
工商網監
評論