 采用Atmega48單片機進行光強度數顯器的設計
采用Atmega48單片機進行光強度數顯器的設計
引言
現行的光控儀,如光強度測量儀等種類繁多,但存在性能不穩定,靈敏度低,制作繁瑣,成本高等不少弊端,為了克服以上弊端,本文據此提出一設計方案。
1.系統設計
1.1 設計要求
本設計采用Atmega48v單片機控制,將光強度細分成許多個等級,并用數字信號顯示出其亮度等級,必須滿足的要求為:
1)提高可靠性和穩定性;
2)提高靈敏度高;
3)降低成本;
4)簡化結構;
5)方便使用。
1.2 總體設計方案
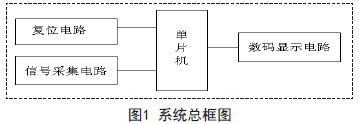
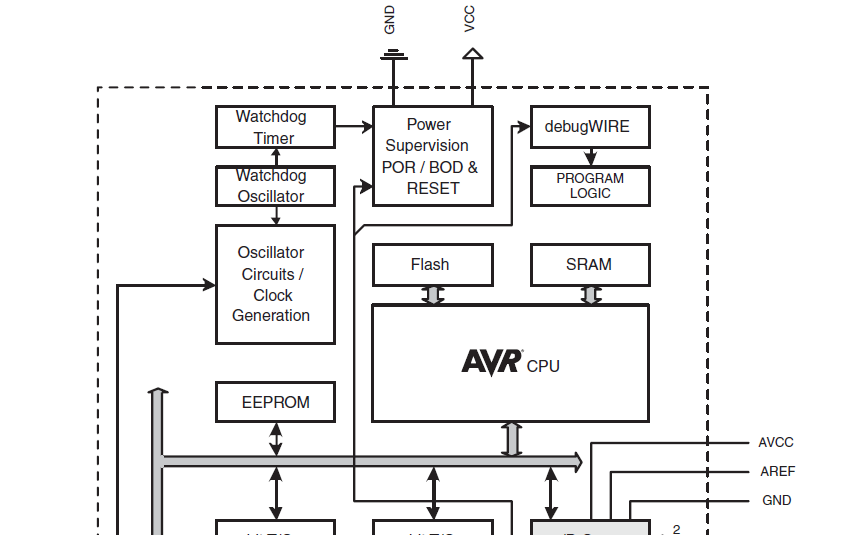
本設計可用于智能機器人的光感應系統,即作為機器人的視覺器官。開機后,單片機即按預先寫入的程序運行,信號采集電路中光敏電阻根據接收的外部光線強弱可以改變其阻值大小,從而改變獲得的電壓大小,并將此電壓傳入單片機的輸入端,單片機內部的模擬比較器及數模轉換器將此模擬信號轉換成數字信號,最后從單片機的輸出端以數字量形式用數碼管顯示出來。從而達到了對光線的等級劃分及等級顯示,以此來控制機器人的尋跡動作。
如圖1所示。
2.單元電路設計
2.1 信號采集電路設計
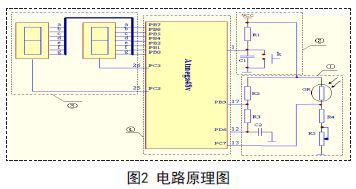
信號采集電路由光敏電阻、滑動電阻、電阻和電容等組成。其中的光敏電阻GR接收外部光線,根據接收到的外部信號的強弱來改變其光敏電阻的阻值大小,從而改變電路中電阻R4和滑動電阻R5上獲得的電壓,并將此電壓傳入單片機,從而完成信號的采集。其接線圖如圖2中①。
2.2 復位電路
單片機在啟動時都需要復位,以使CPU系統各部分處于確定的初始狀態,并從初始狀態開始工作。ATMEGA48單片機的外部復位信號為低電平有效。當系統處于正常工作狀態時,且振蕩器穩定后,如果RST引腳上有一個低電平并維持2個機器周期(24個震蕩周期)以上,則CPU就可以響應并將系統復位。本復位電路采用的是手動按鈕復位,復位腳接上拉電阻,復位腳引出電容接地(電阻電容串接,節點處接reset)。在線下載采用標準接口,在線可編程(ISP),其連接方式如圖2中②。
2.3 數碼管顯示電路
單片機應用系統中,數碼管作為顯示器件得到了廣泛應用,用于阿拉伯數字和部分字母的顯示。驅動多位數碼管時,有動態顯示和靜態顯示兩種連接方式。本設計采用動態顯示,利用單片機內部晶體振蕩器,則硬件設計電路分解為ATmega48單片機和LED數碼管兩個部分,其結構簡單,經濟實惠。采用動態顯示時,將所有數碼管各名稱相同的段位引腳并接在一起由一個I/O端控制;使用PB端口作為字型碼輸出,PC2、PC3分別于兩個數碼管公共端COM引腳相連,即PC2、PC3作為位掃描控制端口。為了簡化電路,使用單片機接口線直接驅動數碼管公共端,只是通過適當調大限流電阻阻值,以減小驅動電流。
其連接方式如圖2中③。
2.4 控制系統
AVR系列的單片機不僅具有良好的集成性能。而且都具備在線編程接口,其中的ATmega系列還具備JTAG仿真和下載功能,含有片內看門狗電路、片內程序nash、同步串行接口SPI;多數AVR單片機還內嵌A/D轉換器、EEPROM、模擬比較強、PWM定時計數器等多種功能。AVR單片機的I/O接口具有很強的驅動能力,電流可直接驅動繼電器、LED等元件。從而省去驅動電路,節約系統成本。其中ATmega48是一款采用先進RISC精簡指令,內置A/D的高速8位AVR單片機,可支持低電壓聯機flash和EEPROM寫入功能,同時還支持Basic和C等高級語言編程,是當今AVR單片機市場上性價比很高的芯片。本設計中ATmega48是核心部件,連接信號采集電路和數碼顯示電路。采集到的信號輸入到單片機經模擬比較、A/D轉換等處理后通過數碼管顯示出來,其連接方式如圖2中④。
2.5 軟件設計
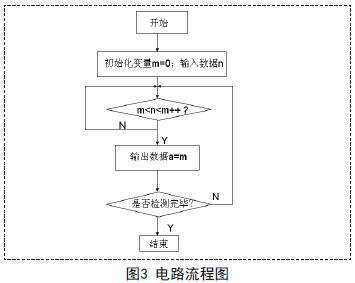
軟件設計包括WINAVR+AVR Studio編輯程序及調試軟件和PROTEUS仿真軟件等部分。根據硬件電路,包括信號采集、邏輯運算、A/D轉換、數字顯示等,其流程圖如圖3:
3.結論
單片機體積小、重量輕、抗干擾能力強、環境要求不高、價格低廉、可靠性高、靈活性好、開發較為容易。尤其是AVR單片機可以用高級語言編程方便實現系統移植,并且加快了軟件的開發過程。本文以ATMega48單片機為核心,輔以必要的電路,采用高級C語言編程設計了一個簡易的動態掃描多位數碼管顯示電路,從而通過LED數碼管能夠顯示多位數字碼。
-
單片機
+關注
關注
6035文章
44554瀏覽量
634651 -
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
數模轉換器
+關注
關注
14文章
1011瀏覽量
83166
發布評論請先 登錄
相關推薦
aTmega48怎么做電池電量檢測
怎樣去設計基于ATmega48單片機的交通燈系統
ATmega48中文資料,ATmega48中文數據手冊
atmega48/atmega88/atmega168 pd
基于ATmega48單片機的可調交流電子負載的設計

基于ATmega48的3相無刷電機的控制方法
atmega48單片機特性 atmega48的低功耗設計

如何使用ATmega48單片機進行微功耗電刺激器的設計
用ATMEGA48制作低成本高精度數字溫度計的程序免費下載
ATmega48和ATmega88及ATmega168微控制器的數據手冊免費下載
基于ATmega48單片機的交通燈系統(一)






 工商網監
工商網監
評論