 通過采用超聲波和PSD紅外探測設計智能語音導盲器
通過采用超聲波和PSD紅外探測設計智能語音導盲器
引言
我國是世界上盲人最多的國家,約有900萬視力殘疾者,占全世界的盲人總數的1 5 左右,每年會新增盲人45萬,即約每分鐘增加一人。完全失明的盲人,在行動引導方面遇到了很大的困難。傳統的手杖無法及時地告知盲人前方障礙物的具體位置。因此,一種廉價實用的智能導盲器的意義重大。
本文設計了一種以超聲波測距和PSD 紅外測距為核心的智能語音導盲器。利用STC12C5A60S2 單片機循環采樣,ISD1700 語音芯片作語音提示,實現導盲提示的功能。本設計著重于解決使用者對前方障礙物的感知,因此本設計的超聲波探測器探測方向,隨使用者頭部指向變化而變化,與使用者頭部指向完全一致,且探測距離為5 m.通過耳機向使用者報數,精確到百分位,實現方向與距離的精確指示。
1 系統結構
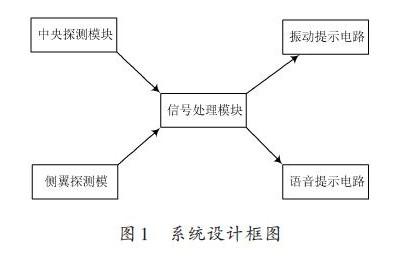
如圖1 所示本設計由探測,處理,提示3 大部分組成。其中探測模塊由中央探測和側翼探測2個部分組成,探測模塊所輸出的信號發送給STC12C5A60S2單片機,通過A/D轉換、判別并通過語音芯片和震動器作距離提示。
2 探測模塊
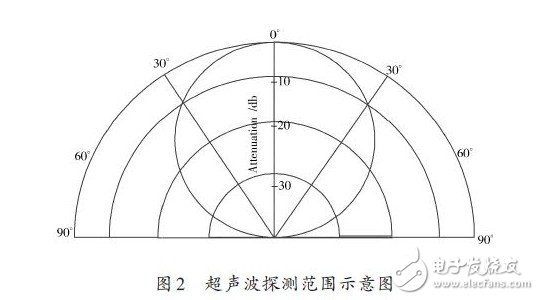
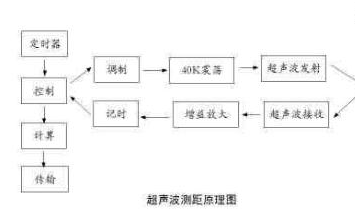
本設計中央探測模塊使用超聲波探測,其測距原理為超聲波裝置發射超聲波并接受反射回波,通過兩者時間差t,利用公式d = v0 t /2 計算距離,d 為超聲波發射裝置與障礙物的距離;v0 為聲波在介質中傳播的速率探測范圍可達4~500 cm,探測角約為30°(見圖3),分辨率達1 cm,誤差少于1%,探測距離以數字量的形式通過TTL 模式和單片機通信,因此完全可以滿足探測精度。探測范圍如圖2所示。
本設計側翼探測模塊使用紅外測距傳感器探測。
該探測器采用三角測量原理(如圖2所示),可以測得裝置到障礙物的距離(20~150 cm),探測角15°(見圖3),距離以模擬量輸出,經單片機A/D 轉換后,根據需要設置多重范圍報警。本設計的3個探測器將分別負責3個方向的探測,角度設置如圖3所示。
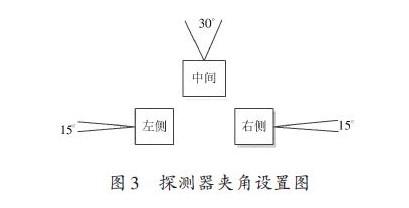
中間的探測器指向正前方,左右兩邊的探測器中線各與中線成90°角,這樣就可以組成一個可以探測前半球180°的模組。
紅外測距傳感器三角測量原理:激光三角法測距的基本原理是基于平面三角幾何。其方法是讓一束激光經發射透鏡準直后照射到被測物體表面上,由物體表面散射的光線通過接收透鏡會聚到高分辨率的光電檢測器件上,形成一個散射光斑,該散射光斑的中心位置由傳感器與被測物體表面之間的距離決定。而光電檢測器件輸出的電信號與光斑的中心位置有關。
因此,通過對光電檢測器件輸出的電信號進行運算處理就可獲得傳感器與被測物體表面之間的距離信息。
為了達到精確的聚焦,發射光束和光電檢測器件受光面以及接收透鏡平面必須相交于一點。
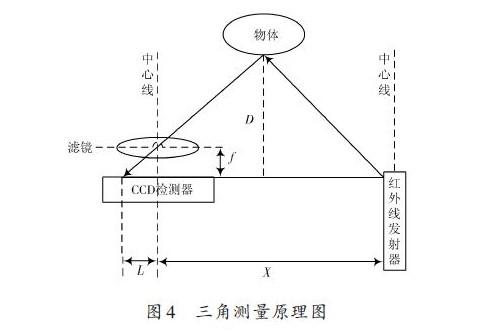
紅外發射器按照一定的角度發射紅外光束,當遇到物體以后,光束會反射回來,測量示意圖如圖4 所示。
反射回來的紅外光線被光感應板檢測到以后,會獲得一個偏移值L,利用三角關系,在知道了發射角度α,偏移距L,中心矩X,以及濾鏡的焦距f 以后,傳感器到物體的距離D 就可以通過幾何關系D= fX/ L 計算出來了。當距離D 足夠小時,L 值會相當的大,超過光感應板的探測范圍,這時,雖然物體很近,但是傳感器反而看不到了。
當物體的距離D 很大時,L 值就會很小,這時光感應板能否分辨出這個很小的L 成為關鍵,也就是說光感應板的分辨率決定能不能獲得足夠精確的L 值。要檢測越是遠的物體,光感應板的分辨率要求就越高。
3 信號處理模塊
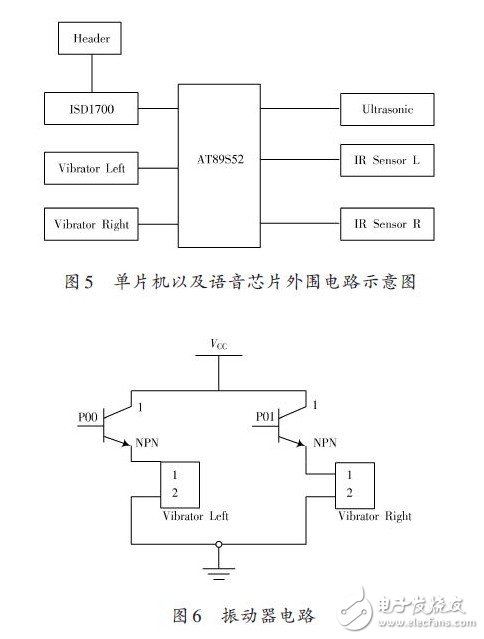
本設計選用了自帶A/D轉換的STC12C5A60S2單片機作為主控模塊,與ISD1700語音芯片通過SPI數據總線連接和通信[7],如圖5所示,振動電路如圖6所示。單片機通過SPI總線直接控制ISD1700語音芯片,輸出預先錄制好的語音片段。
本設計單片機的處理流程圖如圖7所示。
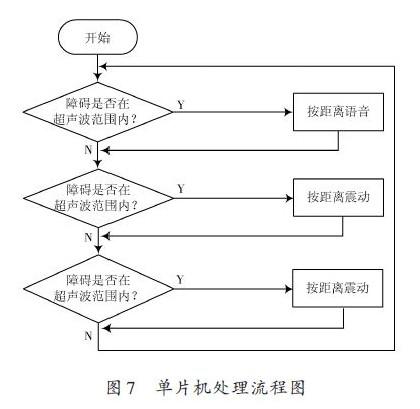
如圖7探測模式如下,探測器模組將以中左右依次探測及報警。由于超聲波所測距離很短,紅外探測器發射和接收信號時間極短,單片機時鐘頻率也有12 MHz,其探測延時極短,因此,這種執行方式對人判別障礙物沒有影響。
4 聲音報警模塊
本設計的報警提示將以一定時間間隔以振動頻率/語音連續提示。超聲波測距器所探測到的距離將以語音的方式提示使用者,形式為X.XX m,精確到百分位。
紅外探頭則將20~150 cm分為兩段,即20~70 cm和70~150 cm.第1個區間震動器將在1 s內振3次,第2個區間在1 s內振1次以分清距離,如圖8所示。

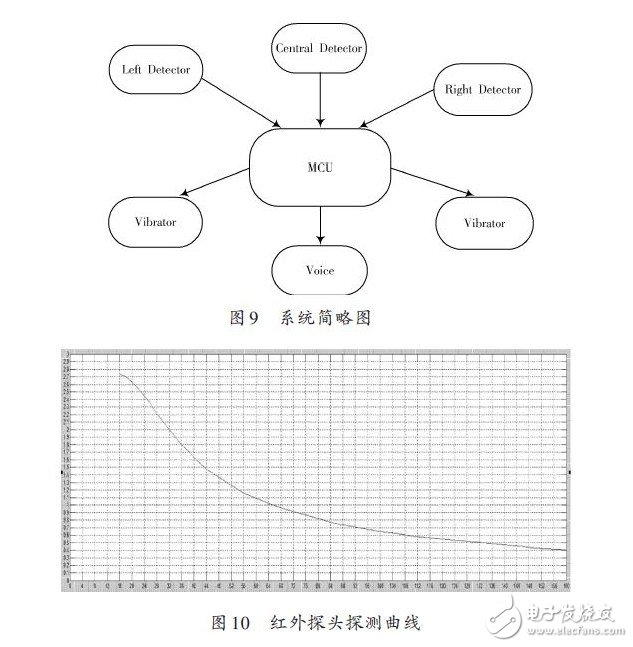
5 系統工作過程簡述
系統的簡略圖如圖9 所示。如圖5 所示,IR、US 分別為紅外探測器和超聲波探測器。分別負責左、中、右的探測。IR 根據所探測的距離輸出相應模擬量,距離與信號大小對應關系如圖10所示。
如圖5所示,負責正中間探測的超聲波探測器探測距離為4~500 cm,單片機的P10(RXD),P11(TXD)與超聲波探測器的TXD,RXD 相接并通過這兩個端口信。超聲波探測器(Ultrasonic)將數據輸入單片機,單片機進行判別后,通過P2.4~P2.8的SPI總線接口發送指令給語音芯片,語音芯片根據接收到的指令將預先錄制好的語音(一、……九、零、米、前方距離)按照一定排序輸出到耳機(以X.XX m的方式,精確到百分位),提示使用者。另外,還可以通過自定義鍵,令語音芯片播放當前溫度的語音。
負責左右兩邊的紅外探頭(IR Sensor)探測范圍20~150 cm,其信號線與單片機的P1.0,P1.1 相連,紅外探頭所探測到的距離以模擬量輸出,經單片機內部A/D轉換后判別,并輸出相應脈沖給P0.0,P0.1口,使三極管導通,從而使振動器振動(圖6)。
如圖5所示,語音芯片的P4~P7口接收到單片機指令后,將相應語音按一定排序,通過P17 AUX端口輸出到耳機,實現語音提示。
6 系統測試
首先,對硬件電路進行電氣檢查,排除電路出現短路等故障發生的可能性;其次,首先進行仿真測試,超聲波探測器通過RS 232接口連接到電腦(見圖11),利用專用軟件,進行軟件測試,如圖12,圖13所示。;最后進行實際測試。


(1)測試報警系統能否實現預期功能測試環境:白天實驗室內,溫度約30 ℃。首先,燒入以5 s為一個循環的單片機程序。經測試,系統首先以語音報出“前方距離X.XX m”,而后左右振動器依次按所測距離震動,以5 s為一個循環,不斷間斷地報數/振動作提示。
其次,燒入另一組程序,通過兩個不同的自定義鍵,實現語音報數,例如:“前方距離3.74 m”,“29.74 ℃”,實現預期功能。(2)報警系統工作的穩定性系統連續開機2 h,每隔15 min,檢查系統一次,系統長時間開機后仍能正常工作。
7 結論與展望
本設計實現了多重距離探測,多向距離探測和多重報警語音提示的功能。在設計過程中,堅持小型、快速、實用、智能的思想,盡可能地實現更多的功能。為此,選定探測距離為4~500 cm 的超聲波探頭和20~150 cm 的紅外探頭做多重距離提示。
目前國內外的導盲器都是采用比較成熟的超聲波測障,而更人性化的導盲器會具有圖像處理系統或者GPS定位系統。本設計在正面探測仍采用成熟的超聲波,并以一定向下的傾角,探測地上障礙物,作為取代導盲杖的一種嘗試。用紅外探頭作左右兩邊的探測,使裝置成本大幅下降,且體積小功耗低。本裝置成本合理,而具有圖像處理系統或者GPS定位系統的導盲器價格很高。因此本設計有一定實用價值。
-
芯片
+關注
關注
455文章
50721瀏覽量
423165 -
單片機
+關注
關注
6035文章
44554瀏覽量
634689 -
超聲波
+關注
關注
63文章
3014瀏覽量
138350
發布評論請先 登錄
相關推薦
基于STM8的紅外與超聲波測距儀設計
基于超聲波傳感器的自主移動機器人的探測系統
基于超聲波傳感器的自主移動機器人探測系統
怎樣去設計基于單片機的紅外超聲波避障導盲儀
基于超聲波傳感器的導盲杖設計
單片機導盲杖兩路超聲波測距報警設計
超聲波導盲儀設計原理是什么?超聲波電子導盲手杖的設計資料概述






 工商網監
工商網監
評論