 采用PIC低功耗單片機實現的磁致伸縮位移傳感器及應用分析
采用PIC低功耗單片機實現的磁致伸縮位移傳感器及應用分析
引言
磁致伸縮位移傳感器是根據磁致伸縮原理制造的高精度、長行程絕對位置測量的位移傳感器。它采用非接觸的測量方式,由于測量用的活動磁環和傳感器自身并無直接接觸,不至于被磨擦、磨損,因而其使用壽命長、環境適應能力強,可靠性高,安全性好,便于系統自動化工作,即使在惡劣的工業環境下(如容易受油潰、塵埃或其他的污染場合),也能正常工作。此外,它還能承受高溫、高壓和強振動,現已被廣泛應用于機械位移的測量、控制中,但這種測量方法存在一些不足之處:①模擬信號抗干擾能力有限,不能遠距離傳輸;②由于電路轉換引入噪聲,使其測量精度不高;③信號互換性差,還需要昂貴的A/D互換設備等。利用單片機及其外圍電路進行較好的處理,實現了多點高精度測量,并通過RS-485串行通信實現遠距離傳輸及接入工業監測網。另外,由于采用PIC低功耗單片機及其他低功耗芯片,優化電路結構,使系統功耗大大降低。
1 磁致伸縮位移傳感器簡介
1.1 傳感器的結構
磁致伸縮位移傳感器由兩部分組成:一部分是套有活動磁鐵的測量桿;另一部分是位于測量桿上端的測量電路。磁致伸縮位移傳感器的結構如圖1所示。圖1中,磁致伸縮位移傳感器主要包括以下幾部分:波導絲、保護管套、移動磁鐵、電路板部分。測量管是整個傳感器的核心傳感部分,這一部分又包括:偏置磁鐵、波導絲、保護管套、末端衰減阻尼裝置、非接觸磁環、轉換器輸出。

1.2 傳感器的工作原理
磁致伸縮線被安裝在不銹鋼管內,鋼管外側可自由滑動,電子裝置中的脈沖發生器產生電流脈沖(起始脈沖)并沿波導線傳播,產生的磁場與活動磁環固有的磁場矢量疊加,形成螺旋磁場,產生瞬時扭力,使波導線扭動并產生張力脈沖(波導脈沖),這個脈沖以固定的速度沿波導傳回,在線圈(轉換器)兩端產生感應脈沖(終止脈沖),通過測量起始脈沖與終止脈沖之間的時間差就可以精確地確定被測位移量。如圖2所示。因為張力脈沖在波導管上的速度恒定,用測得的時間差乘以此速度,得出磁環的位置。這個過程是連續不斷的,每當磁環運動時,新的位置就會被感測出來。

1.3 信號特點及存在的問題
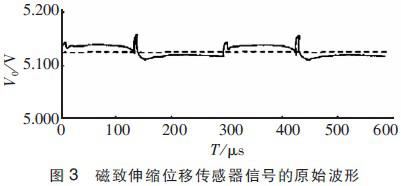
目前,要想直接測量傳感器起始、終止脈沖的時間間隔,得到準確的位置量,不易實現。現階段采用的方法是,把兩個脈沖信號的時間間隔轉換為正比于磁環位置的PWM信號,然后以電流環的形式輸出。在實際測量過程中,傳感器內電流脈沖和感應脈沖會對輸出信號產生一定的干擾;并且傳感器本身的磁性材料感應的磁場與波導管內的電流之間不可避免地會產生電磁干擾(EMIElectroMagneticInterference),使得測量所得的輸出信號有一定程度的畸變,如圖3所示,即是將傳感器的電流環輸出信號轉換為電壓信號得到的波形。另外,如果需要在同一個系統中同時使用幾個磁致伸縮位移傳感器進行位移測量時,傳感器相互之間也會有干擾。這些干擾信號的存在使得控制系統的動、靜態性能不好,對精度高、響應頻率快的控制系統而言,其影響程度是很明顯的,會影響到系統的穩定,必須予以消除。設計一個基于單片機的傳感器信號處理系統,將處理后得到的穩定的輸出信號,以數字信號的形式直接通過遠程通信傳送給計算機進行控制,使得該類型磁致伸縮位移傳感器輸出信號穩定、精度高、傳輸距離遠,與控制系統接口簡單、互換性好、實用性強,使傳感器更具智能化,整體性能得到極大的優化提高。
2 在位移測量中的應用
2.1 系統結構
磁致伸縮位移傳感器位移測量系統的硬件結構如圖4所示。由于磁致伸縮位移傳感器采用符合工業控制標準的4~20mA電流環輸出的形式,故需要先把傳感器的輸出電流信號轉換為電壓信號,再采集出來進行A/D轉換,然后輸出給單片機進行信號處理以及通信處理,最后將理想的傳感器信號以二進制方式傳送給液晶示屏和PC機。傳感器的電路是由敏感元件頭、接收電路、信號整形電路、參數校正輸入電路、計算機處理電路、顯示電路、測量參數輸出電路等組成。
2.2 微處理電路
單片機選用ATMEL公司基于CMOS工藝的8位微處理器AT89C4051,與MCS-51產品系列的指令完全兼容,片內含有4kb的FlashEPROM,它最突出的特點是芯片體
積小,只有20個引腳,特別適合于小型化系統的設計。另外,AT89C4051價格便宜,性價比較高。
2.3 信號整形電路
采用基于抽取被測信號特征量的滑動數字濾波算法。如圖3所示,就是磁環在靜止狀態下,傳感器輸出的模擬信號波形。可以看出,在測量穩定值上疊加有一個頻率較高的干擾信號存在,其最大峰-峰值約為25mV,周期為440μs。如果直接將單次測量值采樣傳送給控制器,在高精度的測量場合下,隨機得到非正常測量值的幾率是比較高的,最大誤差為12個LSB。因此,最好是對某一位移量進行連續的多次測量,得到一組N個測量值,并使這組測量值包含一個干擾周期,便從中獲得一個能夠代表正確值的測量值。信號整形電路的結構包括測量運算放大器、光電耦合器;功能是對測量放大信號整形后送計算機。89C4051是系統硬件實現數字化處理的核心部分,它的主頻工作在11.0592MHz,包括有一個外圍復位電路。主要用于完成控制A/D轉換、信號處理、向主機和LCD以串行方式發送數據等幾個方面的功能。用單片機的P3口作為A/D轉換及通信的控制線。在讀取A/D轉換值時,直接用PI口分兩次讀入12位A/D轉換值。
圖5為使用了數字化處理系統傳感器的磁環分別處于靜態和動態時的測量特性犤4犦。圖5(a)表明系統有良好的測量精度和穩定性,誤差只有1個LSB;圖5(b)表明本系統具有良好的動態測量特性。

2.4 參數輸入矯正電路
矯正電路是由MAX25C045、鍵盤和選擇開關組成,功能是對傳感器的零位、滿量程進行調整,并對波導電流脈沖傳遞速度設定和參數存儲。
2.5 顯示電路
主要根據LCD顯示器的結構與原理,把要顯示的數字對應的碼轉換寫出,即寫出對應的段選碼表,從顯示主程序中調用該表,就可以在LCD上顯示出傳感器的輸出變化值。
2.6 測量參數輸出電路
數據輸出包括12bit高速D/A轉換芯片MAX5302及運算放大器輸出0~5V,0~10V,0~10mA,4~20mA的測量數據;二進制數據輸出包括485接口芯片MAX1428輸出二進制測量數據,數據傳遞距離可達1000m以上。
3 磁致伸縮位移傳感器的發展方向
MTS公司正在研制的TemposonicsER型位移傳感器代表了磁致伸縮位移傳感器的發展方向。TemposonicsER型位移傳感器是磁致伸縮測量原則,利用對超聲波(傳感器產生的扭轉波脈沖)精確的速度、時間測量計算出目標位置。傳感器通過處理信號轉換過程將測量結果直接轉換為標準輸出量。磁致伸縮位移傳感器已向著測量距離長、測量精度高的方向發展。未來采用模塊化設計、模塊化組裝、數字化輸出、抗強電磁干擾和溫度檢測補償等技術,將使該類傳感器成本大幅下降,性能顯著提高,應用范圍更加廣泛。為滿足傳感器工程化、實用化要求,傳感器在最惡劣的工業環境下也具有耐用的特點,無論所測的目標位置困難與否,傳感器都將根據實際情況進行參數調整并配置相應的結構以適合應用系統。傳感器的結構和封裝技術也有待于突破,并實現機械設計和電子裝置的有效綜合。
4 結束語
采用單片機芯片和EIA RS-422/485國際串行數據傳輸標準電路,內置電子模塊采取超小型電子元件貼面焊接,能使新型磁致伸縮傳感器更加穩定、可靠,傳感器的數據傳輸距離大大加長,而且可與PLC、計算機等直接通訊,節省了昂貴的變送器、A/D轉換,從而使用該磁致伸縮傳感器組成的測控系統更加方便、穩定,成本也大大降低。
在提高波導絲的彈性模量和機械強度的同時保證其穩定的伸縮系數,是研制敏感元件的關鍵,也是開發磁致伸縮位移傳感器相當重要的一環,高精度的時間檢測技術和抗惡劣環境的封裝技術也不容忽視。磁致伸縮位移傳感器的研究有著廣闊的市場前景。
-
傳感器
+關注
關注
2550文章
51056瀏覽量
753245 -
單片機
+關注
關注
6036文章
44555瀏覽量
634856 -
PIC
+關注
關注
8文章
507瀏覽量
87551
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論