 RTK GPS定位技術在道路駕駛技能自動化考試系統中的應用
RTK GPS定位技術在道路駕駛技能自動化考試系統中的應用
引 言
隨著社會進步,機動車保有量越來越多,汽車成了普通人的代步工具,參加駕駛員培訓、準備拿駕照的人越來越多,為規范駕駛員培訓,有必要研制開發一種能對駕駛員的駕駛技能和安全意識進行科學、規范測試的自動化考評系統。
現在,駕駛員拿駕照前要通過實際道路駕駛技能考試(科目三考試),即駕駛員在考試時要駕駛考車在3~5km的實際道路上完成上車準備、起步、直線行駛、變更車道、通過路口、通過人行橫道線、學校區域、通過公共汽車站、會車、超車、靠邊停車、掉頭、夜間行駛和綜合評判共計14個考試項目,其中需要檢測考車相對于道路邊緣線、道路中間線、路口停車線、車道分割線的距離,以及檢測直線行駛、掉頭等考試項目是否合格。
本文研制的一種駕駛員實際道路駕駛技能自動化考試系統采用RTK GPS定位技術,能對考車在實際道路上的位置進行動態定位和測距,其精度可以達到"厘米"級,很好地滿足了系統對考車定位和測距的高精度要求。
1 載波相位實時動態差分技術(RTK)定位原理
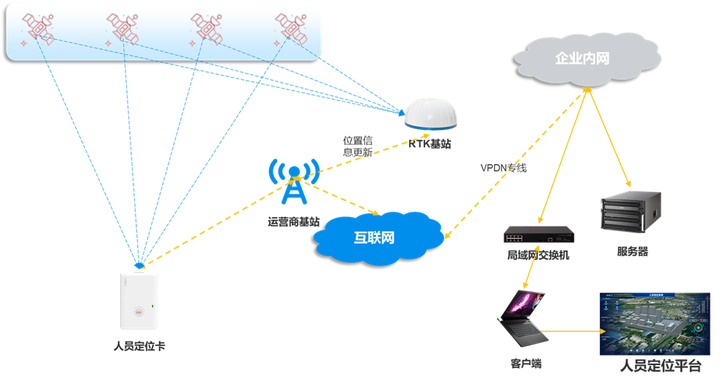
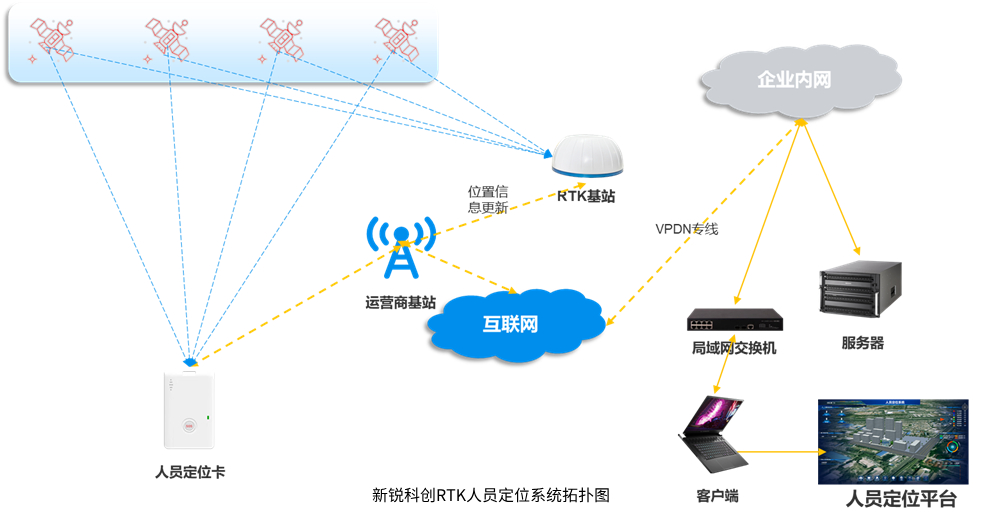
采用RTK GPS定位技術對考試車輛在道路上的位置進行動態定位,其系統組成通常包括三部分:基準站,移動站(考車)和通信單元。基準站通常設置在考試道路附近的建筑物上或路邊立桿上,移動站安裝在考試車輛上,通信單元用于實現基準站和移動站之間的數據通信,如圖1所示。基準站實時接收GPS衛星信號,其偽距的載波相位觀測量見公式(1),并將觀測量以廣播的形式發送出去;移動站(考車)實時接收GPS衛星信號,其偽距的載波相位觀測量見公式(2),同時接收基準站發送的載波相位數據,進行組差解算,其偽距觀測方程見公式(3),通過計算得到厘米級的考車定位坐標。

式中:Nir,o,Nip,o是整周模糊數;Ni r,Nip是從初始歷元開始至觀測歷元間的相位整周累積數;Φi r,Φip是測量相位的小數部分;λ是載波波長,L1載波波長是19cm,L2載波波長是24cm.
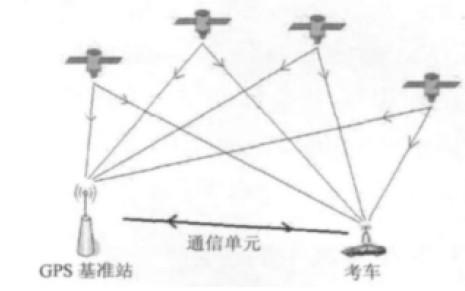
圖1 原理組成

式中:Δ-ρ是同一觀測歷元的各項殘差之和。
在使用RTK GPS定位技術對考車位置進行精確測量時,整周模糊數的正確求解是獲得高精度考車定位位置的必要條件。求解整周模糊數采用整數最小二乘理論,即首先利用最小二乘法求出浮點解,再通過快速搜索算法在整數約束條件下求出整周模糊數,最后得到固定解。在本道路考試系統研制時,為了實現對考車行駛過程中的實時定位,采用組合波寬巷處理技術對整周模糊數求解,工作時采用雙頻GPS接收機,利用常規碼載波相位差分測量,得到一個整周模糊度的近似估值,然后對偽距噪聲及多路徑效應進行平滑,減少整周數的搜索個數,最后根據雙頻信號,通過兩種波長(巷寬)的線性組合,可以得到一個寬巷的巷寬。
GPS的二個載波信號:f1=1 575.42 MHz,波長λ1=19cm;f2=1 227.60MHz,波長λ2=24cm,通過公式(4)的計算得到一個寬巷波長λ 寬為86cm 的巷寬。

寬巷的波長比單頻的波長大4倍,利用寬巷極易在估值范圍內求出巷寬的整周模糊數,再利用f1和寬巷參數間的線性關系求出f1和整周模糊數。該方法求解速度快,一般只需要幾秒到十幾秒就可以快速求解出整周模糊數。在本道路考試系統中,考車行駛時受樹木、建筑物、橋梁和山峰等障礙物影響會出現"周跳"誤差,導致定位精度變差,考車駛出遮擋物的影響區域后,在不到10s的時間內就可以消除"周跳"誤差恢復到精確定位。
RTK GPS定位系統工作時,基準站需要把觀測得到的載波相位信息實時傳送到考車上的移動站,為保證考車定位信息的高精度,要求數據傳送的誤碼率小于10-7,差分信息的更新時間不高于10s,這對基準站和考車之間的無線通信單元提出了較高的要求。
本道路自動化考試系統研制時,利用滿足IEEE 802.11a/b/g協議要求的無線基站端、無線客戶端設備(AP)組建一個能在控制中心(基準站)和考車(移動站)之間實現音頻、視頻、數據通信的無線局域網來傳送基準站觀測的載波信息到移動站,很好地滿足了RTK GPS定位系統中對數據鏈通信的要求;該通信單元也可以利用中國聯通、中國電信提供的3G業務平臺組建一個虛擬專網(VPN)來實現。
2 在駕駛人道路考試中的應用
在道路考試中需要準確檢測出駕駛人駕駛的考車與道路上其他考車、路邊物體、道路邊緣線、道路中間線、路口停車線、車道分界線等之間的距離,以此判斷考車在行駛時是否與其他車輛、物體保持適當的安全距離,是否把考車停在指定區域;如此,要先確定考試區域的參考坐標和相關的地理信息數據。
2.1 道路考試區域坐標系的建立
以RTK GPS基準站(天線)位置作為三維坐標系的原點,東西向、南北向和高度分別作為x,y,z 軸,如圖2所示,把考試區域半徑(3~5km)內的道路信息、標志標線信息、路邊物體信息通過精確測繪得到其坐標,或用相關的直線方程式表示,道路上的曲線用折線來近似代替。
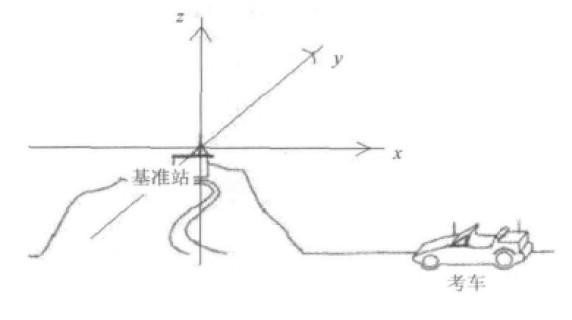
圖2 道路考試區域坐標系。
2.2 考車之間距離的檢測
考車甲在道路上考試,其位置可以通過RTK GPS定位系統實時獲得,假設為P(Xi,Yi,Zi),另一在道路上考試的考車乙的位置實時檢測為Q(Xj,Yj,Zj),考車乙的位置經考試系統中的通信單元傳送到考車甲,則二車之間的距離D 通過公式(5)可以計算出:

實際上,考車是用一個立方體來近似模擬的,并投影到大地平面作為一個長方形來處理。RTK GPS定位系統得到的是安裝在考車車頂GPS天線的坐標,對于確定的車型可以進一步推導出考車右前端(Xjrf,Yjrf,Zjrf)、右后端(Xjrb,Yjrb,Zjrb)、左前端(Xjlf,Yjlf,Zjlf)、左后端(Xjlb,Yjlb,Zjlb)四個點的坐標;考試時,若二車同向行駛,檢測其前后端點之間的距離;若超車,檢測超車考車右前端點與被超考車左后端點之間的距離;若二車相向行使,會車時檢測二車左前端點之間的距離;圖3給出了二車交會時的檢測軟件流程圖。
2.3 考車與道路標線間的距離測量
考車在道路上考試,其與道路上各種交通標線的位置需要實時檢測得到,以確定考車是否按規定正確行駛,考車的位置P(Xi,Yi,Zi)通過RTK GPS定位系統實時測得,道路上的各種交通標線可以用直線表示,曲線可以用折線近似表示,其直線方程在GPS差分基準站確定后通過精密測繪獲得;在空間三維坐標系中,直線方程表示為:{A1x+B1y+C1z+D1=0,A2x+B2y+C2z+D2=0},若是線段可以加上約束條件[(x1,y1,z1),(x2,y2,z2)];直線方程系數A1,B1,C1,D1,A2,B2,C2,D2和開始點(x1,y1,z1)、結束點(x2,y2,z2)坐標通過實際測繪得到。
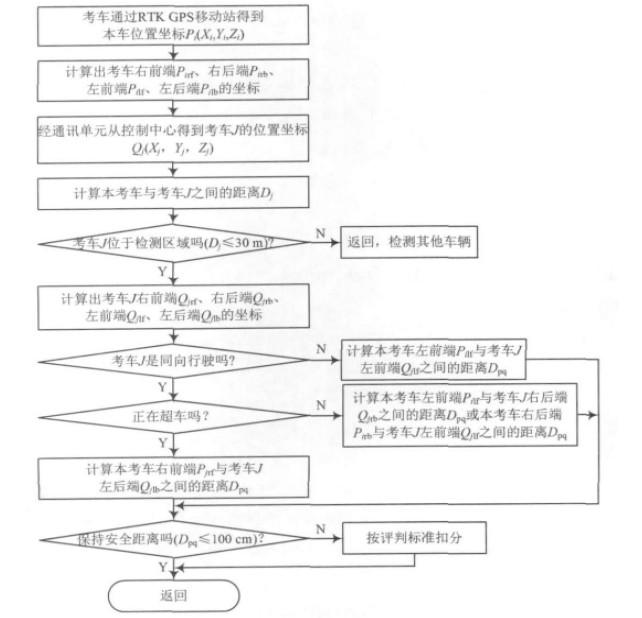
圖3 檢測二車交會過程的考試軟件流程。
如此,考車P 到交通標線間的距離可以通過公式(6)計算得出,進而判斷考車在道路上是否按交規正確行駛和停車,圖4給出了考車在道路上"靠邊停車"項目考試時的檢測軟件流程圖。

式中:δ1 =A1xi+B1yi+C1zi+D1,δ2 =A2xi+B2yi+C2zi+D2,珗n1 = {A1,B1,C1},珗n2 = {A2,B2,C2}.
在檢測考車與路邊緣線之間的距離時,實際上檢測考車右前端和右后端離路邊緣線的距離,取其大者作為考車與路邊緣線間的距離。此外,為減少計算量,通常在非道路立交處,考車與道路標線換算為二維平面坐標進行處理。
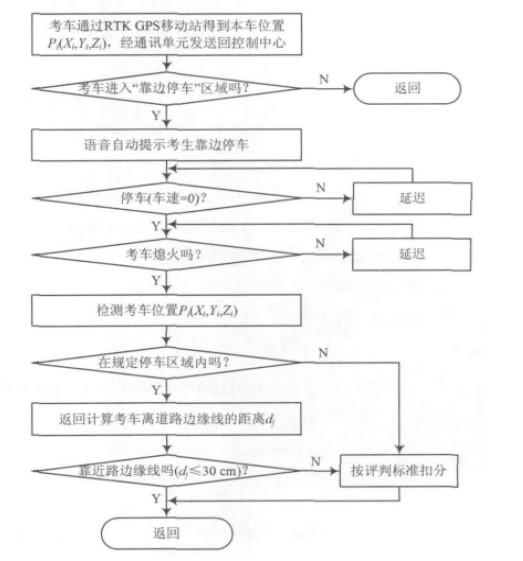
圖4 檢測"靠邊停車"項目考試軟件流程。
3 結 語。
RTK GPS定位技術為駕駛人道路考試時對考車位置的高精度、實時測量提供了很好的解決方案,在公安部規定的100項道路考試檢測項目中,利用RTKGPS定位技術實現的自動檢測項目達到35項,大大提高了整個考試系統的自動化考試程度,且保證了考試要求的檢測精度和實時性要求。
采用RTK GPS定位技術研制成功的道路駕駛技能(科目三)考試系統減少了考試過程中人為因素對考試結果的影響,提高了道路考試評判的準確性、客觀性和公正性,體現了考試過程的公正、公平、公開,對提高駕駛員的綜合駕駛素質、減少道路交通事故起到了積極的推動作用;同時,道路自動化考試系統的使用實現了考試過程的自動評判和考試管理的計算機化、網絡化,極大地解放了警力,實現了科技強警。
-
3G
+關注
關注
4文章
851瀏覽量
181900 -
gps
+關注
關注
22文章
2894瀏覽量
166183 -
中國電信
+關注
關注
22文章
3453瀏覽量
62258 -
中國聯通
+關注
關注
12文章
3648瀏覽量
61471
發布評論請先 登錄
相關推薦
“厘米級”gps定位預計2018年面世,無人駕駛汽車新時代將來臨
UWB定位可以用在自動駕駛嗎
新款上市華測RTK-華測GPS X7 X12 X6測量儀高精度GPS道路定點土石方放樣

GPS RTK定位在駕考中的應用


GPS/北斗RTK差分定位系統的原理以及應用領域
“高精度”定位技術RTK,僅僅是差分GPS嗎?
GPS/北斗RTK差分定位系統的技術原理以及應用領域





 工商網監
工商網監
評論