


引 言
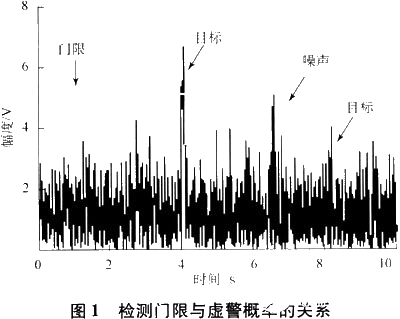
雷達系統的信號檢測是在各種噪聲和雜波干擾的環境中進行的。視頻的回波信號與噪聲、雜波一起送到檢測器,并在檢測器對視頻信號進行分級,即設置一個檢測門限。如果信號超過該門限,就判決目標存在。顯然,門限電平的選擇是至關重要的。如圖1所示。如果門限設置太高,本來可以檢測的弱小目標將被丟失;如果門限設置太低,則虛警太多。由于噪聲和雜波干擾具有不確定性,如果采用固定門限,虛警率將隨噪聲和雜波強度的變化而變化。由計算可知,噪聲或雜波的平均電平提高1倍,虛警率將增大4個數量級。這將嚴重影響檢測器的性能和計算機的工作。因此,必須采用自適應門限檢測電路,進行恒虛警檢測。采用恒虛警處理技術,能夠連續地監視噪聲或雜波平均電平的變化,及時調整檢測門限電平,使其始終保持在最佳檢測門限電平上,保持虛警率恒定。
檢測器的工作環境中只有雜波時的恒虛警處理稱為雜波恒虛警處理;檢測器的工作環境中只有噪聲時的恒虛警處理稱為噪聲恒虛警處理。多普勒雷達工作在高重復頻率時,俯仰角大于0o,波束在自由空間掃描,沒有雜波,只有噪聲,屬于噪聲恒虛警處理。本文利用計算機仿真對單、雙門限的噪聲恒虛警處理進行了研究。
1、 目標檢測判決準則及恒虛警檢測原理
雷達信號的檢測都是以接收機的輸出與某個門限電平相比較為基礎,因此,可能會出現虛警和漏警兩類錯誤。假設H0是接收機只有噪聲的輸入事件,H1是信號加噪聲的輸入事件。D1是認定H1為真的判決,D0是認定H0為真的判決。則虛警概率Pfa和漏警概率Pla為:
判決門限的確定與選擇的最佳準則有關。在雷達信號檢測中,因預先不知道目標出現的概率,也很難確定一次漏檢所造成的損失,所以,通常選擇的準則是保持某一規定的虛警概率下使漏警概率達到最小,或使正確檢測概率達到最大。這就是紐曼一皮爾遜準則。
其決策可以寫為:

式中:l (x)為似然比;λ實際上就是檢測門限。
檢測門限的選擇一般是根據系統所要求的虛警概率來確定。雷達接收機視頻輸入的噪聲主要由機內熱噪聲和潛在的人為干擾等組成,可以假設阻塞(噪聲)干擾的帶寬完全覆蓋了被干擾雷達系統的帶寬,這樣就能按照對待熱噪聲的方法來處理。熱噪聲的特點是具有白色功率譜密度和高斯幅度概率密度,可以推導出它加到包絡檢波器輸出的電壓振幅| X(K)|服從瑞利分布,其概率密度函數為:
![]()
式中:σ為檢波前高斯熱噪聲的均方值;r為檢波器輸出端噪聲包絡的振幅值。
由式(1),計算瑞利分布的期望為E(r)=![]()
假設門限為VT,則超過門限VT的虛警概率為:

可見,虛警概率將隨噪聲的功率而變化。如果保持一定的虛警率Pfa,門限VT可表示為:
![]()
由式(4)可知,當噪聲功率σ增大時,E(r)=![]() 成比例增大,VT相應增大;同樣,
成比例增大,VT相應增大;同樣,
當噪聲功率σ減小時,VT相應減小。檢測門限電平VT總是根據噪聲電平的變化自動調整,即實現了雷達恒虛警。
2、 恒虛警電路的計算機仿真
2.1 單門限噪聲恒虛警處理
圖2是采用MATLAB/simulink軟件建立的單門限噪聲恒虛警電路的仿真模型圖。電路首先對噪聲進行采樣,然后計算噪聲均值,再由噪聲均值求出檢測門限電平,最后檢測電路根據該門限電平對信號進行判決檢測。由于門限電平與噪聲均值成正比,當噪聲電平提高時,門限電平上升,從而保持虛警恒定。
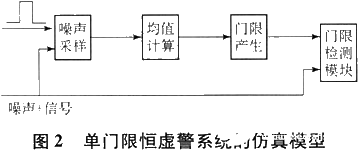
噪聲采樣模塊的作用是提取純噪聲,這里由乘法器完成該功能,乘法器的一端接躁聲+信號,另一端接雷達休止區脈沖,保證選通的信號只有噪聲而沒有回波。均值計算模塊用來計算噪聲的均值,在simulink的DSP工具箱中有做好的模塊。門限產生模塊由噪聲均值和給定的虛警概率按式(4)計算門限電平VT,門限檢測模塊完成判決功能,當信號電平超過VT時,輸出目標標志。
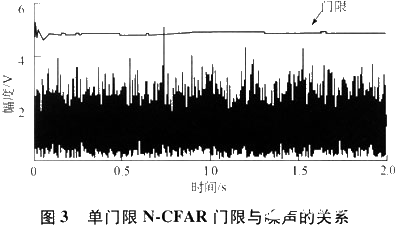
圖3是當噪聲均方值為10、噪聲采樣間隔為10-5s、檢測的虛警率設為10-5時,單門限恒虛警處理噪聲與門限的關系圖。圖3表明,噪聲電平除了在0.75 s時產生虛警,其余時問都沒有超過門限電平,顯然符合虛警率為10-5的要求。
2.2 雙門限恒虛警處理
雙門限噪聲恒虛警電路的Simulink仿真模型見圖4。與單門限恒虛警電路相比,多了1級門限判決,所以電路實現時增加了1級比較器和1級計數器。
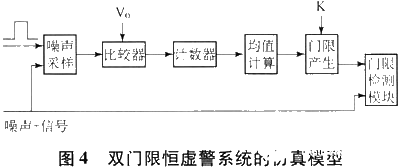
經噪聲采樣后的純噪聲信號送到比較器,比較器的門限為一固定值V0,V0遠低于噪聲的平均電平,使較多的噪聲信號能夠通過比較器。過第1門限V0的噪聲樣本數由計數器計數,設為N0。此計數值與原采樣噪聲總樣本個數Ⅳ相比的值N0/N代表虛警概率Pfa。根據瑞利噪聲的概率分布可求得超過第1門限 V0時的概率PV0為:
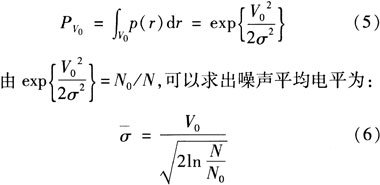
均值計算模塊由式(6)求出噪聲平均電平σ。門限產生模塊由求得的σ按VT=Kσ計算第2門限值,K為一常數,根據虛警多少可自行設置,即可進行人工干預:虛警太多時,提高K值;反之,減小K值。
圖5是當第1門限V0=O.4 V、噪聲均方值σ為10、噪聲采樣間隔為10-5s時,雙門限恒虛警處理電路噪聲與門限的關系圖。圖中分別繪出了K=5和K=6的檢測門限曲線,當K=5時門限值約為5 V,此時在0.75 s有一虛警,而K=6時門限也相應提高到6,虛警消除。與圖3相比,圖5可以通過調整常數K值更加靈活地控制檢測門限和虛警率大小。
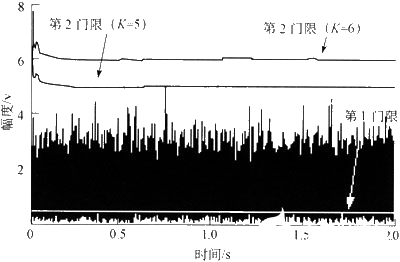
圖5 雙門限噪聲恒虛瞀處理門限與噪聲的關系
由于第2門限(目標檢測門限)VT與噪聲電平均值成正比,也就是說,當噪聲功率增大時,過門限V0的噪聲樣本個數增多,噪聲平均電平升高,VT成比例增大;同樣,當噪聲功率減小時,VT相應減小。檢測門限電平VT總是根據噪聲電平的變化自動調整,使雷達輸
出的虛警概率恒定。
3 、結束語
采用單門限或雙門限的噪聲恒虛警處理方案,可使雷達在恒虛警率下進行目標檢測。通過對檢測門限的人工干預,可使超過門限的尖頭噪聲個數大大減少,改善雷達顯示畫面的噪聲背景。由于檢測門限能夠跟隨噪聲電平自動調整,如果遇到敵方干擾機的噪聲干擾,檢測門限自動提高,要使干擾有效,就必須大大提高干擾機的輸出功率,因此,恒虛警處理具有抗積極噪聲干擾的作用。
責任編輯:gt
-
噪聲
+關注
關注
13文章
1140瀏覽量
48071 -
仿真
+關注
關注
52文章
4259瀏覽量
135665 -
雷達
+關注
關注
50文章
3110瀏覽量
119931
發布評論請先 登錄
雷達信號檢測程序,包括MTI,多普勒濾波器組,恒虛警處...
新的基于單元逼近的恒虛警率檢測器
一種基于FPGA的慢門限恒虛警處理電路設計



基于ADSP-TS201處理器實現雷達恒虛警的軟硬件設計和系統仿真分析

恒虛警檢測算法基礎技術科普






 工商網監
工商網監

評論