 采用Zigbee、傳感器與計算機技術構建的智能燈光跟隨系統介紹
采用Zigbee、傳感器與計算機技術構建的智能燈光跟隨系統介紹
目前,在我國,資源消耗高、浪費大等問題很嚴重,隨著經濟的快速增長和人口的不斷增加,資源不足的矛盾更加突出,建設節約型社會已刻不容緩。節約不僅要減少消費,而且要提高利用效率。建設節約型社會的最大動力在于科技創新。節能性產品成為社會追求的目標。
ZigBee是一種便宜的,低功耗的近距離無線組網通訊技術。Zigbee無線傳感器網絡以其自組網,體積小,低功耗的優勢已在很多地方得到應用。基于此,本文設計了一種基于Zigbee無線傳感器網絡的智能燈光跟隨系統,該系統利用Zigbee無線傳感器網絡和嵌入式控制器,實現了有人時,燈光緊隨人的移動而移動,無人時,燈自動熄滅。避免了長時間、大范圍不必要的照明造成的電能的浪費,達到節能的效果。
1 系統的總體構架
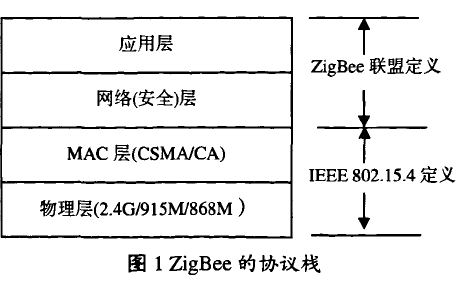
整個系統的布署的拓撲結構如圖1,該系統基于Zigbee的WSN技術,利用Zigbee的低耗能,低成本,高擴充性,免頻段使用費的優點,構建一個無線傳感器網絡。該系統可分為Zigbee無線傳感器網絡,嵌入式控制機構和執行裝置,Zigbee無線傳感器網絡是由一個協調器節點和若干傳感器節點組成的星型網絡,負責采集環境中人員存在方位的信息;Zigbee網絡中傳感器節點分布在房間和走廊的各個角落,實時監測特定區域的人員存在方位的信息。協調器節點負責建立并維護網絡,收集到傳感器節點采集剄的信息,并通過UART方式傳給主控制器。主控制器分析采集的數據,判斷人員的方位,控制舵機的轉向和燈的亮和滅,實現燈光跟隨功能。

2 系統的硬件設計
本系統的硬件主要包括3部分:無線傳感器網絡,嵌入式器PXA270和舵機、照明設備執行機構。
2.1 Zigbee無線傳感器網絡
本系統采用的無線傳感器網絡的核心是基于TI公司生產的CC2430開發的無線模塊,CC2430結合一個高性能2.4 GHz DSSS射頻收發器核心和一顆工業級小巧高效的8051控制器,擁有8~14位ADC、DMA,定時、計數器、USABT、AES-128協處理器、睡眠模式定時器、看門狗、上電
復位和掉電檢測電路以及21個可編程引腳,是一顆真正的系統芯片(SoC)CMOS解決方案。
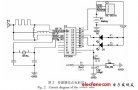
系統中的無線傳感器網絡由一個協調器節點和若干傳感器節點組成,傳感器節點由數據采集模塊,數據處理模塊,無線通信模塊,電源模塊組成,電路圖如圖2所示。
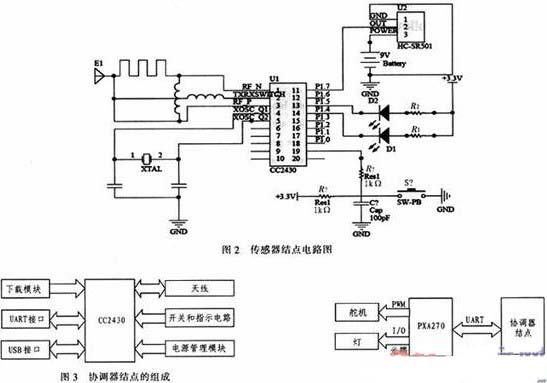
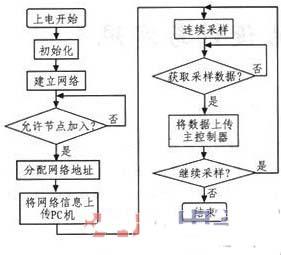
連接人體紅外模塊HC-SR501。HC-SB501是基于紅外線技術的自動控制模塊,采用德國原裝進口LHI778探頭設計,靈敏度高,可靠性強。人進入其感應范圍則輸出高電平,人離開感應范圍則自動延時關閉高電平,輸出低電平。人體紅外傳感器的OUT輸出端口連接到CC2430的I/O口上,把I/O口設置為輸入模式,通過檢測I/O端口的高低電平就能得到人員是否存在的信息。協調器節點功能相當于網關節點,在本系統中充當與主控制器通信的硬件,其組成如圖3所示,包括CC2430射頻模塊,仿真下載模塊,UABT,開關和LED指示燈。Zigbee節點組成星狀網絡,所有的傳感器節點都將采集到的信息實時發送到協調器節點。
2.2 嵌入式控制平臺和執行機構
系統中采用的主控制器為Intel公司生產的PXA270,PXA270基于ARMv5E的Xscale核心,最高頻率可達624 MHz,是一款性能極其強勁的嵌入式處理器,系統的控制機構結構如圖4,PXA270通過串口連接Zigbee協調器節點,通過PWM模塊堆垛機進行控制,I/O端口連接光耦芯片TPL521-4,利用I/O口的高低電平控制TPL521-4輸出的導通和截止,照明裝置的電源線連接到TPL521-4的輸出端口,并固定在在舵機上,隨舵機而轉動。
3 系統的軟件設計
3.1 無線傳感器網絡的設計
系統中Zigbee節點的軟件設計移植了Z-stack協議棧,該協議棧提供了完整的路由協議,并對應用層是完全透明的,只需將數據下發至協議棧,協議棧便會自動尋找路徑,因此在程序開發上,主要是在Z-stack協議棧的基礎上,完成協調器節點和傳感器節點的程序設計。
1)協調器節點的軟件設計
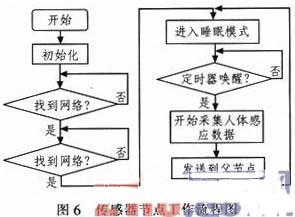
協調器節點是整個網絡的核心,負責網絡的建立和管理,工作流程圖如圖5所示。系統上電后,首先初始化硬件和協議棧,初始化完成后,協議棧掃描出一個合適的信道建立一個網絡。當有設備請求加入時,協調器負責分配它一個16位的短地址,并允許加入網絡,組網完成后,協調器節點開始接受從傳感器節點傳送過來的數據并通過串口傳至嵌入式控制器。
2)傳感器節點的設計
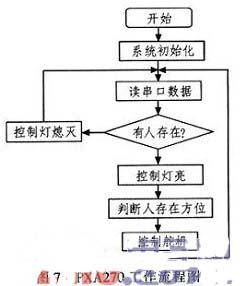
傳感器節點工作流程圖如圖6,其主要通過無線傳輸的方式,將采集到的人員信息送至協調器節點。完成CC2430的初始化后,開始掃瞄信道,尋找到合適的網絡,發進加入網絡信息,得到確認后,開始進入休眠狀態,等待定時器喚醒,收到喚醒指令后,開始通過傳感器采集信息,并發至其父節點。
3.2 嵌入式控制器的軟件設計
PXA270通過串口接收Zigbee節點采集到的信息,根據Zigbee的16位物理地址和相應采集到人是否存在的信息來確定人員的方位,工作流程如圖7所示,首先,檢測是否有節點返回有人存在的信息,如果無人存在,則把I/O口的輸出設置為低電平,使燈熄滅,否則,I/O設置為高電平,燈亮起,然后根據返回的Zigbee的物理地址,判斷是哪個節點返回的信息,從而確定人員存在的大致方位,進而控制舵機轉動,使燈光照向這個方位。
4 系統測試
實驗時,在實驗室搭建了1個小的模型,其中的無線傳感器網絡包含1個協調器節點和3個傳感器節點(Zigbee節點實物如圖8),傳感器節點均勻地分布在走廊的兩側,PXA270和照明裝置(實物如圖9)放在了較高的柜子上。
Zigbee節點上電后,過了大約5 s,開發板上的led顯示網絡建立完成,當人走過時,燈自動的開啟,舵機轉動,照向人存在的方位,當人走動的時侯,舵機隨之轉動。當人離開檢測區域時,照明裝置自動熄滅,實驗結果表明,該系統可以正常工作。
5 結束語
文中采用無線傳感器技術、Zigbee技術、傳感器技術、嵌入式技術和計算機技術構建智能燈光跟隨系統,實現對人體的檢測并使燈光跟隨人體移動,從而達到節能環保的效果。本系統具有成本低、低功耗、檢測準確、實用性強等特點,非常適合在走廊、道路等場所使用,具有很好的經濟效益和社會價值。目前,我們尚處在實驗階段,正在進行產品化過渡。
-
傳感器
+關注
關注
2551文章
51163瀏覽量
754133 -
計算機
+關注
關注
19文章
7508瀏覽量
88070 -
ZigBee
+關注
關注
158文章
2270瀏覽量
242895
發布評論請先 登錄
相關推薦
基于ZigBee技術的傳感器網絡構建與應用
CTP絲印刷計算機技術介紹
基于氣體傳感器的計算機測試系統的研制

如何使用ZigBee技術來設計無線傳感器網絡的詳細構建與應用資料概述
Raspberry Pi與過去的計算機相比如何?







 工商網監
工商網監
評論