

引言
隨著數(shù)字信號(hào)處理器(DSP)在系統(tǒng)控制領(lǐng)域中的廣泛應(yīng)用,控制各系統(tǒng)的DSP 之間 通信問題也越來越突出。利用DSP 本身的高速同步串行接口(SPI)模塊,可以讓DSP 直 接對(duì)接實(shí)現(xiàn)芯片間的同步串行通信。有時(shí)為了充分利用PC 機(jī)資源,讓一些在智能儀器上難 以解決的問題諸如曲線顯示等可以在PC 機(jī)上得以實(shí)現(xiàn),這就需要DSP 內(nèi)嵌的串行通信接口 (SCI)模塊,實(shí)現(xiàn)DSP 與上位機(jī)的異步串行通訊。
本文所介紹的通信方法的背景是為課題組搭建雙開關(guān)磁阻伺服電動(dòng)機(jī)并聯(lián)傳動(dòng)系統(tǒng) (SRSD),系統(tǒng)使用的是TMS320F2812 芯片,具有SPI 模塊和SCI 模塊[1]。本文詳細(xì)介紹 了SPI 模塊和SCI 模塊各自進(jìn)行串行通信的硬件連接和軟件實(shí)現(xiàn)方法,從而完成了基于 TMS320F2812 的雙SRSD 系統(tǒng)通信模塊的實(shí)現(xiàn)。
1 系統(tǒng)簡(jiǎn)介
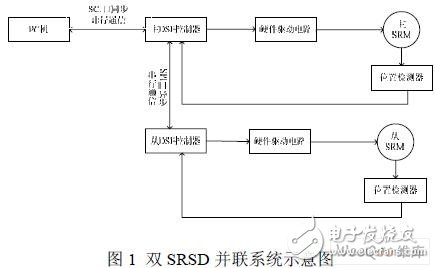
雙電機(jī)并聯(lián)系統(tǒng)有很多優(yōu)點(diǎn),它比單電機(jī)系統(tǒng)在處理電機(jī)空間放置方式上更為靈活,并 且有利于改進(jìn)電機(jī)的特性。相對(duì)于單電機(jī)系統(tǒng),在相同的輸出情況下,雙電機(jī)的總轉(zhuǎn)動(dòng)慣量 更小,從而可以減少運(yùn)行時(shí)的電能消耗。此外,當(dāng)雙電機(jī)中的一臺(tái)損壞后,另一臺(tái)仍可以在 短時(shí)間內(nèi)或適當(dāng)減少負(fù)載的情況下繼續(xù)運(yùn)行,提高了系統(tǒng)的可靠性[3]。
本文背景以SRSD 為主要研究對(duì)象,以位置輸出為主要控制量。在單機(jī)系統(tǒng)的基礎(chǔ)上, 經(jīng)過改進(jìn),設(shè)計(jì)出雙SRSD 并聯(lián)系統(tǒng),系統(tǒng)框圖如圖1 所示。
2 串行通信原理及特性
在計(jì)算機(jī)中,通常用8 位的二進(jìn)制代碼來表示一個(gè)字符,一條信息的各位字符的二進(jìn)制 代碼被按由低到高位的順序,依次地發(fā)送出去的通信方式叫做串行通信。它的特點(diǎn)是按位發(fā) 送。根據(jù)信息的傳送方向,串行通信可以分為單工通信、半雙工通信和全雙工通信。在本文 中采用的是全雙工的通信方式。串行通信按照傳輸方式的不同又可以分為同步方式和異步方 式。同步方式較復(fù)雜,但傳送速率比異步方式高。本文中SPI 采用是同步方式,SCI 采用是 異步方式。
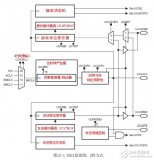
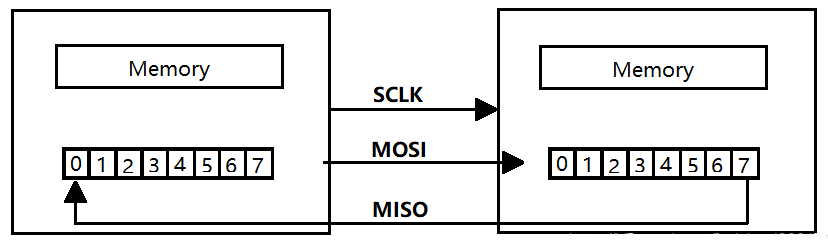
TMS320F2812 的SPI 是一個(gè)高速的同步串行輸入/輸出端口,一般用來實(shí)現(xiàn)DSP 控制器 之間和DSP 與外圍設(shè)備之間的通信。SPI 有兩種操作模式:主操作模式和從操作模式。主片 控制了時(shí)鐘信號(hào)(SPICLK),它可以在任何時(shí)候通過發(fā)送SPICLK 信號(hào)來啟動(dòng)數(shù)據(jù)傳輸。 無論是主片還是從片,數(shù)據(jù)都是在SPICLK 的某個(gè)邊沿移出移位寄存器,在SPICLK 相反的 邊沿鎖存在移位寄存器中,并且輸出和接受數(shù)據(jù)都是同時(shí)進(jìn)行的。
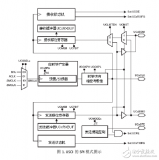
芯片的 SCI 是一個(gè)雙線通信的異步串行通信接口,也稱UART 口,一般用于接上位機(jī)(以下簡(jiǎn)稱PC 機(jī))。
3 同步通信模塊的設(shè)計(jì)
3.1 基于SPI 模塊的硬件設(shè)計(jì)
讓兩個(gè) DSP 分別工作在主、從操作模式下,兩者的引腳連接如圖2 所示。主處理器通 過SPICLK 腳向整個(gè)通信網(wǎng)提供串行時(shí)鐘,控制著系統(tǒng)的數(shù)據(jù)傳輸;通過SPISTE 腳給從處 理器提供片選信號(hào),低電平有效;通過SPISIMO 腳把數(shù)據(jù)輸出到從處理器的SPISIMO 腳上; 通過SPISOMI 腳接受從機(jī)處理器SPISOMI 腳上的數(shù)據(jù)。

3.2 同步通信流程設(shè)計(jì)及軟件實(shí)現(xiàn)
在設(shè)計(jì)時(shí),主處理器先向從處理器發(fā)送給定信息,發(fā)送完畢后,循環(huán)發(fā)送0,使SPICLK 不停地有時(shí)鐘脈沖輸出,并等待接受從處理器發(fā)送的數(shù)據(jù)。從處理器先是等待給定信息,如果接收到非零數(shù)據(jù),則進(jìn)行下一步運(yùn)行并不斷向主處理器發(fā)送當(dāng)前數(shù)據(jù)。
SPI 通信主處理器的流程圖和從處理器的流程圖分別如圖3、圖4 所示。
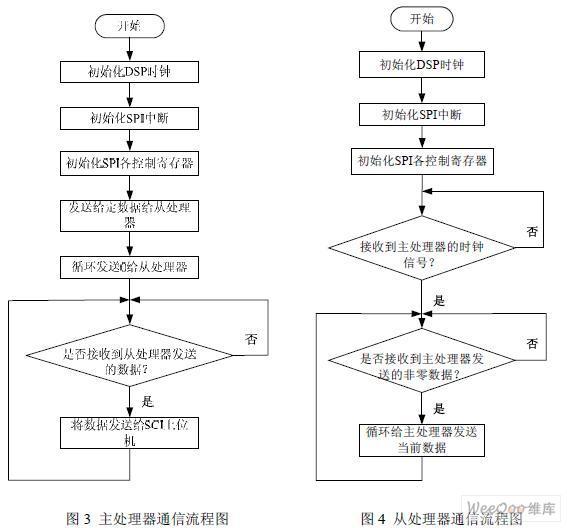
在完成兩個(gè)DSP 時(shí)鐘和中斷初始化后,分別對(duì)其SPI 寄存器進(jìn)行設(shè)置,讓其分別處于 master 和slave 模式。主、從處理器都采用查詢方式發(fā)送數(shù)據(jù),中斷方式接受數(shù)據(jù)。
查詢方式發(fā)送是判斷SPI 發(fā)送緩沖器已滿標(biāo)志位(SPISTS.bit.BUFFULL_FLAG)是否 為空,如果為空,則將數(shù)據(jù)寫入發(fā)送緩沖寄存器(SPITXBUF)中,啟動(dòng)SPISIMO 引腳的 數(shù)據(jù)發(fā)送,數(shù)據(jù)發(fā)送完畢后SPISTS.bit.BUFFULL_FLAG 自動(dòng)清零,等待下一次發(fā)送。
中斷方式接受是在SPI 中斷使能位(SPICTL.bit.SPIINTENA)置位的情況下,如果接收 到數(shù)據(jù)傳送到SPI 串行數(shù)據(jù)寄存器(SPIDAT)中,SPI 中斷標(biāo)志位(SPISTS.bit.INT_FLAG) 置位且觸發(fā)中斷,并將數(shù)據(jù)轉(zhuǎn)移到接受緩沖寄存器(SPIRXBUF)中,如果SPIRXBUF 中數(shù) 據(jù)被讀取,則SPISTS.bit.INT_FLAG 自動(dòng)清零,等待下一次接受中斷。
SPI 部分發(fā)送和接受程序如下:
void spi_TxProcess()
{
while(SpiRegs.SPISTS.bit.BUFFULL_FLAG==1) {}
/*判斷SPISTS.bit.BUFFULL_FLAG)是否為空*/
if(SpiRegs.SPISTS.bit.BUFFULL_FLAG==0)
{
SpiRegs.SPITXBUF=slave_value;
/*向SPITXBUF 寫入數(shù)據(jù)以啟動(dòng)數(shù)據(jù)發(fā)送*/
}
}
interrupt void SPIRXINTA_ISR(void)
/*中斷方式接受*/
{
TX_data2=SpiRegs.SPIRXBUF;
/*讀取SpiRegs.SPIRXBUF 后自動(dòng)清除中斷標(biāo)志位*/
return;
}
4 異步通信模塊的設(shè)計(jì)
4.1 基于SCI 的硬件設(shè)計(jì)
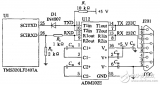
圖 5 為上位機(jī)和DSP 的硬件連接圖。RS-232C 標(biāo)準(zhǔn)采用負(fù)邏輯:邏輯“1”為-5V~-15V 之間的低電平,通常用-12V 表示;邏輯“0”為+5V~+15V 之間的高電平,通常用+12V 表示。 上述標(biāo)準(zhǔn)稱為EIA 電平。
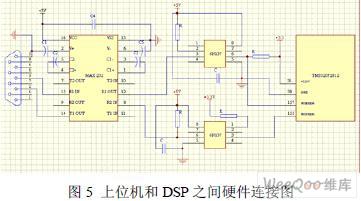
RS-232C 是用正負(fù)電壓來表示邏輯狀態(tài),并且是負(fù)邏輯,而TTL 則以高低TTL 器件電 平表示邏輯狀態(tài),且為正邏輯,兩者的規(guī)定是不同的。為了能夠?qū)⑴cEIA 器件連接,保證 二者之間正常通信,必須在它們之間進(jìn)行電平和邏輯關(guān)系的變換。本Maxim 公司生產(chǎn)的集 成芯片MAX232 來實(shí)現(xiàn)這一變換[4]。變化后的電平在經(jīng)過6N137 轉(zhuǎn)換為適合TMS320F2812 的電平在+3.3V 以內(nèi)的信號(hào)。
4.2 SCI 通信的軟件實(shí)現(xiàn)
通信前,發(fā)送端和接受端必須使用雙方協(xié)商一致的通信協(xié)議,數(shù)據(jù)被拆分成為(bit)進(jìn) 行傳送。傳送的順序一次為起始位、數(shù)據(jù)位、奇偶校驗(yàn)位、停止位。每秒鐘傳送的bit 數(shù)由 波特率來決定。本文中的通信協(xié)議設(shè)定為:波特率38400bit/s,8 位數(shù)據(jù)位,無奇偶校驗(yàn),1 位停止位,數(shù)據(jù)傳輸同時(shí)采用ASCⅡ碼和二進(jìn)制兩種形式。
上位機(jī)采用Visual Basic6.0(以下簡(jiǎn)稱VB)語言編程實(shí)現(xiàn),利用VB 中提供的MSComm 控件可以實(shí)現(xiàn)PC 機(jī)與下位機(jī)的通信。利用MSComm 實(shí)現(xiàn)通信有兩種方法:一是事件驅(qū)動(dòng) 方法,也就是OnComm 事件。當(dāng)有數(shù)據(jù)到達(dá)端口或端口狀態(tài)發(fā)生改變或有通信錯(cuò)誤產(chǎn)生時(shí), 都將發(fā)生OnComm 事件。另一種就是查詢方式。查詢方式是通過周期性讀取緩沖區(qū)的信號(hào) 來發(fā)現(xiàn)是否有事件發(fā)生并進(jìn)行處理的方法。本設(shè)計(jì)中,發(fā)送采用查詢方式,接受采用事件驅(qū) 動(dòng)方法。MSComm 控件初始化程序如下:
MSComm1.CommPort = 1 '端口號(hào)'
MSComm1.Settings = "38400,n,8,1"
'波特率38400bit/s,8 位數(shù)據(jù)位,無奇偶校驗(yàn),1 位停止位'
MSComm1.InputLen = 0
MSComm1.InBufferCount = 0 '清空接收緩沖區(qū)'
MSComm1.OutBufferCount = 0 '清空'
MSComm1.RThreshold = 1 '接收緩沖區(qū)或發(fā)送緩沖區(qū)中可以接收的字符數(shù)'
MSComm1.PortOpen = True
應(yīng)實(shí)際要求,我們要在通信中同時(shí)傳輸數(shù)據(jù)和控制字符,所以數(shù)據(jù)傳輸同時(shí)采用ASCⅡ 碼和二進(jìn)制兩種形式。這就需要在每次傳輸前改變MSComm1.InputMode 的屬性。
TMS320F2812(SPI 通信中主處理器)在完成時(shí)鐘和中斷初始化后,對(duì)其SCI 寄存器進(jìn) 行設(shè)置,使其通信協(xié)議和上位機(jī)一致。TMS320F2812 采用查詢方式給上位機(jī)發(fā)送數(shù)據(jù),中 斷方式接受上位機(jī)的數(shù)據(jù)。SCI 寄存器設(shè)置如下:
SciaRegs.SCICCR.all=0x0007;
/*一個(gè)停止位,禁止奇偶校驗(yàn),禁止自測(cè),8 個(gè)字符*/
SciaRegs.SCICTL1.all=0x0003;
/*禁止接受錯(cuò)誤中斷,復(fù)位,禁止休眠,開啟發(fā)送使能*/
SciaRegs.SCICTL2.all=0x0002;
/*開接受中斷,關(guān)發(fā)送中斷*/
SciaRegs.SCIHBAUD=0x00;
SciaRegs.SCILBAUD=0x79;
/*波特率38400*/
SciaRegs.SCICTL1.all=0x0023;
/*開始使能SCIA*/
5 結(jié)束語
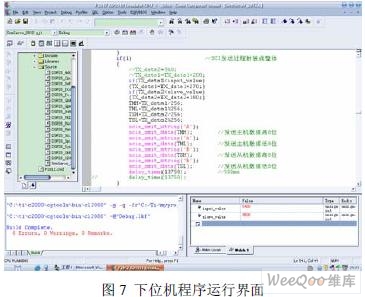
以上為解決兩個(gè)DSP 之間以及DSP 與PC 機(jī)之間的通信的軟硬件設(shè)計(jì)方案,當(dāng)上位機(jī) 發(fā)送給定信息(位置信息)后,下位機(jī)接受到數(shù)據(jù)并傳輸給SPI 處理器,上位機(jī)和下位機(jī)界 面如圖6、圖7。
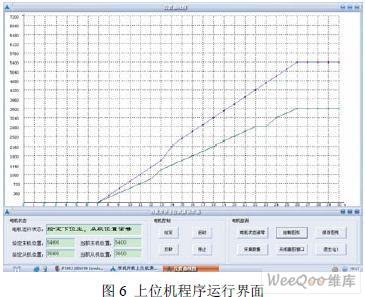

系統(tǒng)的最大特點(diǎn)是根據(jù)實(shí)際需要,采用同時(shí)同步和異步兩通信方式。雙系統(tǒng)間的同步串 行通信,保證了雙系統(tǒng)運(yùn)行的同步性;通過PC 機(jī)和上位機(jī)的異步串行通信,實(shí)現(xiàn)把DSP 采集的一系列數(shù)據(jù)通過串口發(fā)送至PC 機(jī),解決了DSP 存儲(chǔ)空間有限的問題,在PC 上可以 很方便地對(duì)數(shù)據(jù)進(jìn)行一些在DSP 上難以實(shí)現(xiàn)的處理,得到一些數(shù)據(jù)曲線等,效果直觀便捷。 此系統(tǒng)已應(yīng)用與某一開關(guān)磁阻電機(jī)電機(jī)并聯(lián)控制系統(tǒng)中,運(yùn)行穩(wěn)定,通信性能良好。
-
dsp
+關(guān)注
關(guān)注
556文章
8151瀏覽量
355970 -
SPI
+關(guān)注
關(guān)注
17文章
1788瀏覽量
95074 -
串行通信
+關(guān)注
關(guān)注
4文章
587瀏覽量
36082
發(fā)布評(píng)論請(qǐng)先 登錄
揭秘DSP電機(jī)控制串行通信系統(tǒng)電路設(shè)計(jì)
串行同步通信的應(yīng)用

基于雙DSP的并聯(lián)控制系統(tǒng)中串行通信的研究
基于MSP430F2的SPI串行同步通信
關(guān)于DSP多SPI端口通信設(shè)計(jì)的探究
基于SPI通信接口的兩片DSP的雙向通信和任務(wù)同步
dsPIC33E/PIC24E器件之串行外設(shè)接口(SPI)
PIC24F系列參考手冊(cè)之串行外設(shè)接口(SPI)
使用VHDL設(shè)計(jì)串行同步通信SPI的論文免費(fèi)下載
常用串行總線(二)——SPI協(xié)議(Verilog實(shí)現(xiàn))
常用串行總線——SPI協(xié)議(上)
常用串行總線——SPI協(xié)議(下)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論