

1 引言
在圖像自動(dòng)目標(biāo)識(shí)別和跟蹤過(guò)程中,首先對(duì)圖像目標(biāo)進(jìn)行閾值分割提取,得到的二值圖像通常包含多個(gè)連通區(qū)域,系統(tǒng)利用圖像目標(biāo)的形狀特性對(duì)可疑高威脅的飛行目標(biāo)進(jìn)行自動(dòng)識(shí)別。因此,需要對(duì)各連通區(qū)域塊進(jìn)行分別檢測(cè)判斷,本文采用改進(jìn)的適合FPGA實(shí)現(xiàn)的快速標(biāo)記算法對(duì)各連通域進(jìn)行檢測(cè)提取。
實(shí)現(xiàn)二值圖像連通體檢測(cè)通常采用的方法有下幾種[1] [2] [3]:區(qū)域生長(zhǎng)法:首先對(duì)圖像進(jìn)行逐行(列)掃描,每遇到一個(gè)未標(biāo)記的“1”像素點(diǎn),就分配其一個(gè)未使用過(guò)的標(biāo)號(hào),然后對(duì)其領(lǐng)域進(jìn)行檢測(cè),如有未標(biāo)記過(guò)的“1”像素,則賦予相同的標(biāo)號(hào)。反復(fù)進(jìn)行這一操作.直到不存在應(yīng)該傳播標(biāo)號(hào)的“1”像素。然后繼續(xù)圖像行(列)掃描,如檢測(cè)判未標(biāo)記的“1”像素則賦予其新的標(biāo)號(hào),并進(jìn)行與以上相同的處理。整個(gè)圖像掃描結(jié)束,算法也就終止。這種方法可準(zhǔn)確地檢測(cè)出各種類(lèi)型的連通體.但處理時(shí)間也較長(zhǎng).因?yàn)橐鹨粰z測(cè)每一“1”像素的鄰域,且出現(xiàn)“1”像素的重復(fù)掃描。跟蹤算法:二值圖像中每個(gè)取值為“1”的像素 被標(biāo)記一個(gè)與其坐標(biāo)相關(guān)的標(biāo)號(hào),如由n,m串構(gòu)成的數(shù)。熱后,掃描標(biāo)記后的圖像,并將每十像素的標(biāo)號(hào)改為其鄰域內(nèi)的最小標(biāo)號(hào)。反復(fù)執(zhí)行這個(gè)過(guò)程,直到不需要作標(biāo)記更改為止。用這種方法處理小而凸的目標(biāo)時(shí),收斂速度較慢。
本文以適合FPGA實(shí)現(xiàn)為目的,提出一種具有計(jì)算規(guī)則性的快速二值圖像連通域標(biāo)記算法。與傳統(tǒng)的二值圖像標(biāo)記算法相比,該算法具有運(yùn)算簡(jiǎn)單性、規(guī)則性和可擴(kuò)展性的特點(diǎn),適合以FPGA實(shí)現(xiàn)。選用在100MHz工作時(shí)鐘下,處理384×288像素的紅外圖像能夠達(dá)到400幀/秒以上的標(biāo)記速度,足夠滿足實(shí)時(shí)目標(biāo)識(shí)別系統(tǒng)的要求。處理速度可以滿足大部分實(shí)時(shí)目標(biāo)識(shí)別系統(tǒng)的要求。該算法同樣可以軟件編程方式應(yīng)用于嵌入式DSP系統(tǒng)中。
2 算法描述
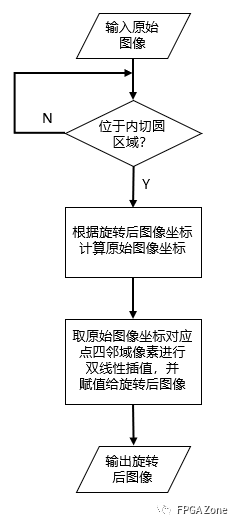
首先,在進(jìn)行標(biāo)記算法以前,利用硬件開(kāi)辟獨(dú)立的圖像標(biāo)記緩存和連通關(guān)系數(shù)組,接著在視頻流的采集傳輸過(guò)程中,以流水線的方式按照視頻傳輸順序?qū)D像進(jìn)行逐行像素掃描,然后對(duì)每個(gè)像素的鄰域分別按照逆時(shí)針?lè)较蚝退椒较蜻M(jìn)行連通性檢測(cè)和等價(jià)標(biāo)記關(guān)系合并,檢測(cè)出的結(jié)果對(duì)標(biāo)記等價(jià)數(shù)組和標(biāo)記緩存進(jìn)行更新,在一幀圖像采集傳輸結(jié)束后,得到圖像的初步標(biāo)記結(jié)果以及初步標(biāo)記之間的連通關(guān)系,最后,根據(jù)標(biāo)號(hào)對(duì)連通關(guān)系數(shù)組從小到大的傳遞過(guò)程進(jìn)行標(biāo)號(hào)的歸并,利用歸并后的連通關(guān)系數(shù)組對(duì)圖像標(biāo)記緩存中的標(biāo)號(hào)進(jìn)行替換,替換后的圖像為最終標(biāo)記結(jié)果,并且連通域按照掃描順序被賦予唯一的連續(xù)自然數(shù)。
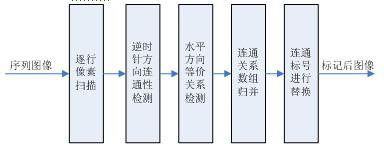
圖 1 標(biāo)記算法流程
本文快速二值圖像連通域標(biāo)記算法分為三個(gè)環(huán)節(jié):
1.圖像初步標(biāo)記:為每個(gè)像素賦予臨時(shí)標(biāo)記,并且將臨時(shí)標(biāo)記的等價(jià)關(guān)系記錄在等價(jià)表中
2.整理等價(jià)表:這一環(huán)節(jié)分為兩個(gè)步驟:
(1)將具有等價(jià)關(guān)系的臨時(shí)標(biāo)記全部等價(jià)為其中的最小值;
(2)對(duì)連通區(qū)域以自然數(shù)順序重新編號(hào),得到臨時(shí)標(biāo)記與最終標(biāo)記之間的等價(jià)關(guān)系。
3.圖像代換:對(duì)圖像進(jìn)行逐像素代換,將臨時(shí)標(biāo)記代換為最終標(biāo)記.經(jīng)過(guò)3個(gè)環(huán)節(jié)處理后,算法輸出標(biāo)記后的圖像,圖像中連通域按照由上到下,由左至右出現(xiàn)的順序被標(biāo)以連續(xù)的自然數(shù)。
2.1 圖像初始標(biāo)記
標(biāo)記算法符號(hào)約定:算法在逆時(shí)鐘方向檢測(cè)連通域時(shí)用w1,w2表示連續(xù)兩行的圖像數(shù)據(jù),在緊接著的順時(shí)鐘方向連通域檢測(cè)時(shí)用k0,k表示連續(xù)兩行經(jīng)過(guò)逆時(shí)鐘方向標(biāo)記后的圖像數(shù)據(jù)。 其在工作窗口的位置在圖2、3中分別說(shuō)明;對(duì)初始逆時(shí)針?lè)较蚺R時(shí)標(biāo)記用Z表示。Z初始標(biāo)記值為1。
二值圖像連通域標(biāo)記算法采用8連通判斷準(zhǔn)則,通過(guò)縮小標(biāo)記范圍剔除了圖像的邊界效應(yīng)。為了簡(jiǎn)化標(biāo)記處理過(guò)程,使標(biāo)記處理在硬件對(duì)一幀圖像傳輸操作時(shí)間內(nèi)結(jié)束,標(biāo)記處理利用中間數(shù)據(jù)緩存分為連續(xù)的兩種類(lèi)型,其中類(lèi)型1用于直接圖像序列傳輸,硬件發(fā)起圖像序列傳輸時(shí),類(lèi)型1采用逆時(shí)鐘順序連通域檢測(cè),對(duì)2×3工作窗口中的二值像素進(jìn)行初始標(biāo)記。類(lèi)型2對(duì)經(jīng)過(guò)類(lèi)型1初始標(biāo)記過(guò)的圖像數(shù)據(jù)再進(jìn)行水平方向的連通域檢測(cè)和歸并,然后把標(biāo)記結(jié)果存入圖像存儲(chǔ)區(qū)。
圖像初始標(biāo)記類(lèi)型1:
步驟1讀取像素w1(2)、w1(1)、w1(0)、w0(2)、w0(1),以及相應(yīng)的二值像素值。
步驟2讀取像素w0(1),按照逆時(shí)針?lè)较蛞来闻cw1(0)、w1(1)、w1(2)、w0(2)比較,若w0(1)= w1(0),則k0(1)=k(2);若w0(1)= w1(1),則k0(1)=k(1);若w0(1)= w1(2),則k0(1)=k(0);若w0(1)= w0(2),則k0(1)=k0(0);否則(即w0(1)≠(w1(2)、w1(1)、w1(0)、w0(2)),k0(1)= Z;Z ++。
步驟3寫(xiě)入等價(jià)關(guān)系表,以Z為地址將Z寫(xiě)入等價(jià)關(guān)系數(shù)組。
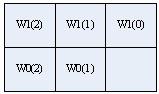
圖 2 逆時(shí)鐘方向初始標(biāo)記的工作窗
圖像初始標(biāo)記類(lèi)型2:
步驟1判斷經(jīng)過(guò)逆時(shí)針?lè)较驑?biāo)記后,如果w0(1)= w0(2)= 1,而標(biāo)記灰度k0(1)≠ k0(0),則進(jìn)行下一步驟。
步驟2 假設(shè)k0(1)》 k0(0),判斷l(xiāng)ab(k0(1))=k0(1)或者lab(k0(1))=k0(0),則lab(k0(1))=k0(0),否則對(duì)標(biāo)記數(shù)組進(jìn)行追蹤置換。跳轉(zhuǎn)至步驟3。
步驟3 假設(shè)k0(1)《 k0(0),判斷l(xiāng)ab(k0(0))=k0(0)或者lab(k0(0))=k0(1),則lab(k0(0))=k0(1),否則對(duì)標(biāo)記數(shù)組進(jìn)行追蹤置換。
追蹤置換方法:步驟2的追蹤置換令t= lab(k0(0));若lab(t)≠ t,則令t= lab(t),重復(fù)執(zhí)行,直lab(t)=t;步驟3的追蹤置換令t1= lab(k0(1)),對(duì)lab(k0(1))同樣執(zhí)行上述追蹤過(guò)程。
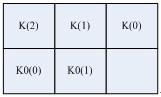
圖 3 水平方向初始標(biāo)記的工作窗
2.2 等價(jià)表整理與圖像代換
首先,從等價(jià)表地址1開(kāi)始掃描等價(jià)表,依次檢查其中各個(gè)臨時(shí)標(biāo)記是否存在等價(jià)關(guān)系,若存在,則以標(biāo)記值作為等價(jià)表地址的數(shù)據(jù)更新等價(jià)表。由于整理過(guò)程從等價(jià)表地址1開(kāi)始,因此對(duì)整個(gè)等價(jià)表的掃描可以一遍結(jié)束。
圖像代換環(huán)節(jié)對(duì)臨時(shí)標(biāo)記圖像中的每個(gè)像素進(jìn)行代換,生成最終的標(biāo)記后圖像。具體做法是:設(shè)圖像中坐標(biāo)為(n,m)的像素的臨時(shí)標(biāo)記值為S,則將lab(S)寫(xiě)入圖像中(n,m)位置。代換后得到的圖像,其中的
連通區(qū)域按照由上到下,由左至右出現(xiàn)的順序被標(biāo)以惟一的自然數(shù)。
2.3 算法特點(diǎn)分析
算法設(shè)計(jì)具有以下特點(diǎn):
a.本文算法針對(duì)空中目標(biāo)的識(shí)別和跟蹤進(jìn)行標(biāo)記,可以剔除對(duì)空中目標(biāo)識(shí)別沒(méi)有影響的圖像的邊界,圖像中其他像素的標(biāo)記工作均利用2.1中所述算法完成,因此運(yùn)算具有規(guī)則性和同地址性,利用硬件實(shí)現(xiàn)時(shí)只需要定義兩個(gè)算法框架函數(shù)循環(huán)使用,節(jié)約了算法存儲(chǔ)器資源。
b.圖像初步標(biāo)記過(guò)程中,在記錄標(biāo)記等價(jià)信息的同時(shí)對(duì)等價(jià)表進(jìn)行初步整理,這樣安排,一方面可以保證區(qū)域之間存在復(fù)雜連通關(guān)系時(shí),等價(jià)表能夠保存已經(jīng)檢測(cè)到的全部等價(jià)關(guān)系;另一方面,在以硬件電路實(shí)現(xiàn)標(biāo)記算法時(shí),圖像初步標(biāo)記和等價(jià)表初步整理的過(guò)程可以并行執(zhí)行,等價(jià)表的初步整理,能夠簡(jiǎn)化隨后的等價(jià)表整理操作,相當(dāng)于壓縮了標(biāo)記執(zhí)行的全過(guò)程。
c.在本算法中,采取兩方面措施減少臨時(shí)標(biāo)記數(shù)量:其一,反復(fù)利用8鄰域范圍內(nèi)生成的所有標(biāo)記信息,在逆時(shí)針順序8鄰域范圍標(biāo)記后借助圖像傳輸?shù)捻樞蜻M(jìn)行水平方向的等價(jià)標(biāo)記歸并,降低了需要賦予新標(biāo)記值的概率;其二,在等價(jià)表整理時(shí),歸并等價(jià)標(biāo)記時(shí)按照等價(jià)表地址從小到大的的順序進(jìn)行比較替換,使等價(jià)標(biāo)記取較小值并且不會(huì)遺漏等價(jià)標(biāo)記。其三,結(jié)合視頻數(shù)據(jù)流傳輸方式,采用乒乓存儲(chǔ)結(jié)構(gòu)進(jìn)行流水線處理,同時(shí)進(jìn)行圖像標(biāo)記和圖像標(biāo)記替換。使圖像標(biāo)記達(dá)到實(shí)時(shí)處理的效果。
3 算法的FPGA實(shí)現(xiàn)
FPGA(Field Programmable Gate Array)是一種大規(guī)模的可編程邏輯器件,可以用于各種數(shù)字邏輯系統(tǒng),特別是實(shí)時(shí)處理方面,具有獨(dú)特的優(yōu)勢(shì)。在本算法的實(shí)時(shí)實(shí)現(xiàn)過(guò)程中,采用Altera公司的性價(jià)比高的Cyclone II EP2C8 FPGA[4],該器件內(nèi)部有8256個(gè)LE,,18個(gè)DSP模塊,165888bits存儲(chǔ)單元。這些存儲(chǔ)單元可以配置為大小、位數(shù)不同的存儲(chǔ)器,它可以減少外部存儲(chǔ)器的使用,縮小硬件的體積,便于電路的小型化。
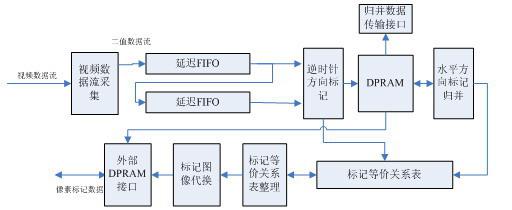
圖4 快速標(biāo)記算法FPGA實(shí)現(xiàn)的硬件結(jié)構(gòu)
圖4所示快速標(biāo)記算法FPGA實(shí)現(xiàn)的硬件結(jié)構(gòu),主要由二值視頻流延遲FIFO串并轉(zhuǎn)換、逆時(shí)針標(biāo)記單元、歸并數(shù)據(jù)傳輸接口、水平方向標(biāo)記歸并單元、標(biāo)記等價(jià)關(guān)系表、標(biāo)記等價(jià)關(guān)系整理單元、圖像標(biāo)記代換等單元構(gòu)成。
FPGA內(nèi)部視頻流采集單元,根據(jù)分割閾值對(duì)采集來(lái)的灰度數(shù)據(jù)進(jìn)行二值化,輸出二值視頻流;通過(guò)延遲FIFO的串并轉(zhuǎn)換,將串行的二值視頻數(shù)據(jù)流轉(zhuǎn)換成兩行并行的數(shù)據(jù);逆時(shí)針?lè)较驑?biāo)記單元利用移位寄存器對(duì)接受來(lái)的并行數(shù)據(jù)流組成圖2所示窗口,在窗口內(nèi)對(duì)數(shù)據(jù)進(jìn)行逆時(shí)針的連通性檢測(cè),生成初始的等價(jià)關(guān)系表并且對(duì)像素?cái)?shù)據(jù)進(jìn)行臨時(shí)標(biāo)記;水平方向標(biāo)記歸并單元緊接在逆時(shí)針?lè)较驑?biāo)記后,對(duì)初始標(biāo)記后的像素?cái)?shù)據(jù)通過(guò)移位寄存器組成如圖3所示的數(shù)據(jù)窗,對(duì)數(shù)據(jù)窗中的數(shù)據(jù)在水平方向進(jìn)行標(biāo)記等價(jià)性判斷,歸并屬于同一區(qū)域的標(biāo)記值,并且追蹤置換標(biāo)記等價(jià)關(guān)系表,把在此以前的等價(jià)標(biāo)記值全部統(tǒng)一成最小的標(biāo)記值,最后把歸并后的并行標(biāo)記視頻流存入后續(xù)雙端口RAM組成的存儲(chǔ)器組中;外部雙端口RAM在下一行視頻數(shù)據(jù)流處理時(shí)把標(biāo)記好的上一行像素?cái)?shù)據(jù)存入到外部雙端口RAM中。
一幀圖像數(shù)據(jù)標(biāo)記完畢后,在視頻數(shù)據(jù)的間隙對(duì)等價(jià)關(guān)系表數(shù)組進(jìn)行整理歸并,等到下一幀視頻數(shù)據(jù)傳輸時(shí),從外部雙端口RAM中取出上一幀數(shù)據(jù)進(jìn)行標(biāo)記圖像代換完成最終的圖像標(biāo)記。
標(biāo)記緩存采用乒乓結(jié)構(gòu)通過(guò)FPGA中的雙端口RAM構(gòu)成,標(biāo)記兩行圖像數(shù)據(jù)的同時(shí)外部雙端口RAM接口對(duì)已標(biāo)記的一行圖像數(shù)據(jù)進(jìn)行存儲(chǔ)。圖5所示標(biāo)記緩存結(jié)構(gòu),乒乓結(jié)構(gòu)標(biāo)記緩存模塊一共用了3個(gè)384*10bit的雙端口RAM,每個(gè)雙端口RAM對(duì)應(yīng)一行圖像標(biāo)記數(shù)據(jù),依靠水平方向歸并單元和外部DPRAM接口交互進(jìn)行數(shù)據(jù)存儲(chǔ),當(dāng)水平方向歸并單元同時(shí)存儲(chǔ)其中兩個(gè)雙端口RAM時(shí),外部DPRAM接口對(duì)剩余的第三個(gè)雙端口RAM進(jìn)行存數(shù)操作,構(gòu)成標(biāo)記緩存乒乓結(jié)構(gòu)存儲(chǔ)操作。外部存儲(chǔ)接口用像素時(shí)鐘的4倍頻對(duì)緩存中的數(shù)據(jù)進(jìn)行搬移,確保在其余兩個(gè)雙端口RAM標(biāo)記完畢后外部數(shù)據(jù)也搬移完畢。實(shí)驗(yàn)證明在一行標(biāo)記數(shù)據(jù)傳輸時(shí)間里可以完成3行標(biāo)記數(shù)據(jù)搬移。
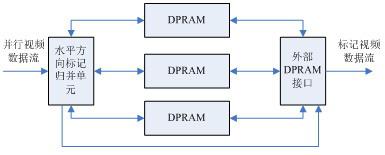
圖5 標(biāo)記緩存結(jié)構(gòu)
為了滿足標(biāo)記的實(shí)時(shí)流水線處理,外圍雙端口RAM也采用乒乓結(jié)構(gòu)。在對(duì)一幀圖像標(biāo)記數(shù)據(jù)存儲(chǔ)的同時(shí)取出數(shù)據(jù)進(jìn)行標(biāo)記圖像代換,并且在取數(shù)的過(guò)程中完成對(duì)標(biāo)記結(jié)果圖像的形狀的識(shí)別,外圍雙端口RAM的內(nèi)部構(gòu)造如圖6所示,把外圍雙端口RAM設(shè)成圖像幀A、B兩個(gè)區(qū),利用兩個(gè)數(shù)據(jù)地址端口同時(shí)對(duì)A、B兩個(gè)區(qū)進(jìn)行操作。因此標(biāo)記算法整體延時(shí)一幀視頻數(shù)據(jù)傳輸時(shí)間,具有很強(qiáng)的實(shí)時(shí)性。
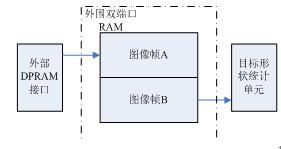
圖6 外圍雙端口RAM的內(nèi)部分區(qū)
4 實(shí)驗(yàn)結(jié)果與分析
圖7、8、9、10給出對(duì)4幅384×288二值紅外圖像的標(biāo)記結(jié)果,由于本文設(shè)計(jì)針對(duì)天空中飛行目標(biāo),因此剔除圖像邊緣(對(duì)于圖像邊緣的背景目標(biāo)不標(biāo)記,致為0值);統(tǒng)一了標(biāo)記算法規(guī)則,減小了邊緣背景對(duì)目標(biāo)識(shí)別的影響。
圖7、8、9、10所示均為在多云背景的天空中含有飛機(jī)編隊(duì),對(duì)于形狀各異的云層具有復(fù)雜的復(fù)連通關(guān)系,產(chǎn)生復(fù)雜的等價(jià)表操作,最終被正確地賦予相同的標(biāo)記。仿真結(jié)果相關(guān)數(shù)據(jù)示于表1。其中,F(xiàn)PGA工作時(shí)鐘為100 MHz;n為連通區(qū)域個(gè)數(shù);N(MAX)為最大臨時(shí)標(biāo)記;T1為TI公司的6416DSP通過(guò)傳統(tǒng)的收斂標(biāo)記算法執(zhí)行時(shí)間;T2為T(mén)I公司的6416DSP通過(guò)本文設(shè)計(jì)的快速標(biāo)記算法執(zhí)行時(shí)間;T3為FPGA通過(guò)本文設(shè)計(jì)的快速標(biāo)記算法執(zhí)行時(shí)間。
仿真結(jié)果證明,傳統(tǒng)的收斂標(biāo)記算法以軟件方式運(yùn)行于TI公司DSP6416系統(tǒng)中時(shí),算法處理速度不確定,取決于圖像中連通域的形狀和數(shù)量;本文中描述的二值分割圖像標(biāo)記快速算法以軟件方式運(yùn)行于TI公司DSP6416系統(tǒng)中時(shí),算法處理384×288像素圖像可以達(dá)到50幀的處理速度;但是,以FPGA實(shí)現(xiàn)該算法時(shí),在100MHz工作時(shí)鐘下,能夠達(dá)到400幀/秒的處理速度。
表1 圖像標(biāo)記仿真結(jié)果對(duì)比

圖7 含有4架飛機(jī)目標(biāo)的二值紅外圖像和標(biāo)記后的圖像
圖8 含有2架飛機(jī)目標(biāo)的二值紅外圖像和標(biāo)記后的圖像
圖9 含有4架飛機(jī)目標(biāo)的二值紅外圖像和標(biāo)記后的圖像
圖10 含有2架飛機(jī)目標(biāo)的二值紅外圖像和標(biāo)記后的圖像
-
dsp
+關(guān)注
關(guān)注
555文章
8118瀏覽量
353963 -
FPGA
+關(guān)注
關(guān)注
1640文章
21899瀏覽量
611386 -
嵌入式
+關(guān)注
關(guān)注
5121文章
19418瀏覽量
312618
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
在FPGA上跑二值圖像膨脹算法程序代碼

matlab連通域的數(shù)字標(biāo)記
基于FPGA的二值圖像的膨脹算法的實(shí)現(xiàn)
快速二值圖像連通域標(biāo)記算法有哪幾個(gè)環(huán)節(jié)?特點(diǎn)是什么?
如何利用FPGA設(shè)計(jì)實(shí)現(xiàn)GNSS信號(hào)的頻域快速捕獲算法?
多運(yùn)動(dòng)目標(biāo)跟蹤及連通域標(biāo)記方法
基于FPGA的二值圖像連通域標(biāo)記快速算法實(shí)現(xiàn)
DCT域數(shù)字水印算法的FPGA實(shí)現(xiàn)
基于SoPC的邊緣圖像連通區(qū)域標(biāo)記的算法


如何使用FPGA實(shí)現(xiàn)圖像的中值濾波算法
基于FPGA的圖像旋轉(zhuǎn)和雙線性插值算法設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論