


1 引言
隨著計算機技術和現代測試技術的快速發展,利用傳統的集成測試方法已經難以滿足復雜測試任務的需求。虛擬儀器以開放性好、智能化程度高、界面友好等優勢顯示了其強大的生命力,研究內容已經涉及到工程的諸多領域。
現有的虛擬儀器技術在研究和實現上已取得了一定成就,但隨著測量內容的日益復雜、測量數據和指標的不斷增加,對虛擬儀器的應用也提出了越來越高的要求,一些問題逐漸顯現出來。比如現有儀器系統的開發依賴于經驗的積累,一般由用戶根據自身需求開發小功能集的虛擬儀器系統;儀器的平***立性和擴展性差,儀器系統的設計和執行效率低下,適應性不夠強[2]。因此,如何提高虛擬儀器系統的執行效率,降低設計難度,是虛擬儀器系統研究中一個需要解決的重要問題。
移動agent是一種獨立的可確認的計算機程序,它可以自主地在異構網絡上按照一定規程移動,尋找和利用適合的計算資源、信息資源和軟件資源,代表用戶完成特定任務[3]。它具有主機間動態遷移性、智能性、平臺無關性、分布靈活性、多agent合作性等六方面的特點。
因此,在本文中考慮將移動agent技術運用到虛擬儀器系統體系結構的構建中,用以改善現有虛擬儀器系統中出現的一些問題。
2 基于移動agent的虛擬儀器體系結構設計
根據虛擬儀器系統的設計和移動agent系統的特點,在體系結構設計中選用了綜合分層和網狀體系結構最佳特征的混合模型,如圖1所示。
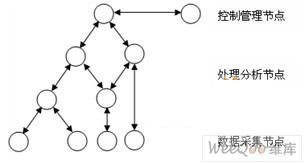
圖1 MAVIS的系統體系結構
圖1中的雙箭頭——上層到下層表示控制流方向,下層到上層表示數據流方向。由于采用了網狀體系結構,整體上又保留了分層結構的特點,因此組件間可以不按照嚴格的分層結構進行通信。這樣在對虛擬儀器系統中的agent進行管理時,只需更改該agent的信息,不會影響其他agent的工作。例如當需要執行一個新的數據采集或處理分析任務時,只需派遣一個新的agent去執行任務即可,不需停止或重啟已執行處理分析任務的agent。
在該體系結構中,最下層的數據采集葉節點負責測試數據的采集,包括采樣位置、信號類型等信息,并在將其傳遞到上層處理分析節點前進行數據過濾,以減輕上層節點的工作壓力,有利于處理分析節點專注于虛擬儀器系統的功能實現。
上層的處理分析節點主要負責處理數據,如對其進行時頻域分析,統計分析等,提取影響測量結果的參數指標并最終在本地機上形成測試結論顯示出來。處理分析agent的生成可以通過頂層的控制管理節點動態控制。為了保證處理分析agent能夠高效地運行相關測試,在系統運行開始就根據所需測試的基本類型構造處理分析agent集合。在運行過程中,當添加的處理分析agent和其他agent互相協作成功完成一次任務時,系統就生成新的agent并添加到該虛擬儀器系統的處理分析agent集合中。一旦需要刪除處理分析agent時,就必須從虛擬儀器系統的處理分析agent集合中刪除與該處理分析agent相關的所有agent。頂層的控制管理節點主要負責節點的分派和召回。
該體系結構由分布在各受控主機上的移動agent組成,各相鄰agent的關系平等,連結松散,可彼此獨立進行操作,這樣設計的虛擬儀器系統更具容錯性和重構性。移動agent的引入使數據采集節點、處理分析節點和控制管理節點并不總駐留在一臺物理主機上,即移動agent可以作為處理分析節點移動到最合適的物理位置。
3 基于移動agent的虛擬儀器系統的實現
通過比較,由IBM東京Waston研究中心開發的Aglets以其自身包容易安裝、穩定性好、安全性高、跨平臺、直接提供適合Java的移動agent技術、示例簡單等優勢,成為MAIVS系統研究設計的平臺。Aglets用純Java語言編寫,具有較好的健壯性和移動性。作為最早基于Java的商業化系統,它提供了一套簡單而全面的移動agent編程模型和詳細且易用的安全機制,并為agent間提供了動態、有效的通信機制。在實現過程中,設計關注具有檢測功能的處理分析agent的實現,而不需考慮整個系統的通信機制和行為協調模式。
對于向用戶提供可執行程序這一問題,當前的應用程序雖然可以訪問資源,但是它不具有普適性,也不能進行實用的計算。事實上,一旦用戶想要執行一個應用程序,他不得不:(1)請求環境資源;(2)分配任務;(3)觸發和控制執行;(4)得到結果;(5)釋放資源[4]。
在MAIVS的體系結構設計過程中,需要解決以下三個問題:系統的總體框架、使用的儀器數量及類型以及軟件實現[5]。軟件系統是虛擬儀器系統的核心部分。在虛擬儀器系統中軟件主要由功能軟件和虛擬面板控件兩部分構成。前者主要包括硬件控制、采集卡控制、數據處理分析及顯示;后者包括虛擬顯示器、旋鈕、按鈕等。本文主要關注前者可按照功能封裝成獨立的agent的軟件模塊設計與實現,通過Aglets提供的通信機制在虛擬儀器系統中協調一致的工作。
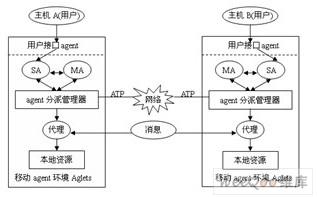
圖2 MAIVS任務求解流程圖
圖2中的移動agent環境,即agent的運行環境是Aglets系統。移動agent有兩種環境分配策略:一種是為每個移動agent分配單獨的服務環境;另一種是為所有的移動agent分配同一個服務環境。前一種分配策略具有更強的安全性,但會占用更多的資源[6]。agent分派管理器是移動agent服務環境的中心部件。它將移動agent正常運行所需的各項服務正確分配給相應的子模塊,包括建立移動agent的執行環境、啟動服務等。此外,它還負責協調各子模塊間的相互工作,保證它們的正常運行。靜態agent(Static agent,SA)主要完成agent分派管理器與用戶接口agent的交互。
移動agent的任務求解過程如下:
① 源主機(主機A)根據用戶需要完成的檢測任務,通過用戶接口agent初始化欲創建的移動agent的內部狀態集、知識庫、約束條件等。
② 將代表用戶需求的特征表示寫入移動agent的知識庫,設置最長運行時間、每個站點停留時間、任務完成度、經由節點的最大數目等約束條件。
③ ATP定義了移動agent在各受控主機間遷移的語法和語義,具體實現了agent在服務環境間的遷移,包括移入和移出。移動agent利用ATP完成與本地移動agent服務環境的通信,并在該服務環境中利用ATP協議完成移動agent在網絡環境中從目標主機和agent分派管理器間的遷移。
④ 問題求解完成后,移動agent在返回結果前先判斷網絡的連通性。如果連通并且用戶端(主機A)的Aglets平臺已經啟動,那么移動agent就可以直接返回;反之,則需要等待直到具備傳送條件才激活移動agent,并將其傳回到源主機(主機A),將任務的求解結果提交給用戶。
⑤ 完成自身卸載進入終止狀態,結束任務。
借助移動agent技術,在不同的硬件平臺下,可以完全由用戶自定義虛擬儀器系統的功能模塊,通過選取基本的測試硬件模塊,利用不同的軟件構造出針對具體測試任務的測試儀器,即功能不同的處理分析agent。從而完成具有不同檢測功能的處理分析agent的“信號的調理與采集—數據的分析與處理—結果的輸出與顯示”。
4 實驗仿真
將基于移動agent的虛擬儀器系統體系結構模型應用到遠程電子測量實驗教學平臺的構建。實驗仿真內容包括:在Aglets平臺上,發送一個波形檢測器agent和一個隨機波形發生器agent到其中一臺主機,用以檢測發生波形和數據采集的結果;通過Aglets提供的Dispatch功能遠程召回對PCI-6220 NI數據采集卡采集的數據進行處理分析的agent。
實驗結果表明,基于移動agent的虛擬儀器系統體系結構模型可以提高現有虛擬儀器系統的執行效率,增強其擴展性。這是因為移動agent技術遷移的是邏輯而非數據。雖然移動agent的代碼和參數都需要在網絡環境中傳輸,但這兩者結合起來的傳輸量仍比需要處理分析的原始數據量少的多,這種盡可能在本地機上處理分析數據的方式,有利于提高虛擬儀器系統的執行效率。
此外,在該體系結構的仿真實驗中需要多次實驗以確定合適的采樣周期和觸發間隔,即確定采樣率和采樣次數。采樣率越高則在單位周期內的采樣次數越多。而觸發器時間取決于所構建系統的運行速度。
為保證整個系統的正常運行,賦予每個處理分析agent一個生命周期值。當其成功執行一次任務后,該值加1。隨著處理分析agent集合數量的不斷增大,需要淘汰生命周期不強的agent,即淘汰生命周期值最小的agent。
5 結論
基于移動agent的虛擬儀器系統體系結構模型的提出,結合了現有虛擬儀器系統和移動agent技術的優勢,有利于改善現有虛擬儀器系統的可重用性和平臺依賴性,用戶可以用較少的系統開發維護費用和更少的時間開發出功能更強、質量更可靠的產品和系統,有利于提高現有虛擬儀器系統的設計效率。
-
計算機
+關注
關注
19文章
7672瀏覽量
90911 -
虛擬儀器
+關注
關注
23文章
777瀏覽量
88065 -
智能化
+關注
關注
15文章
5139瀏覽量
57347
發布評論請先 登錄
虛擬儀器和傳統儀器的比較
組建虛擬儀器系統的費用如何?
基于虛擬儀器的城市景觀照明分布式控制系統設計與實現
基于移動agent虛擬儀器系統體系結構模型
虛擬儀器技術介紹
怎么實現基于虛擬儀器的PLC監控系統的設計?
基于虛擬儀器技術的諧波在線監測系統的設計與實現
基于虛擬儀器技術實現網絡虛擬示波器系統的設計





 工商網監
工商網監

評論