") 基于射頻芯片CC2500實現(xiàn)樓宇定位系統(tǒng)的設計
基于射頻芯片CC2500實現(xiàn)樓宇定位系統(tǒng)的設計
1、引 言
隨著樓宇智能化程度的提高,人們已經(jīng)不再滿足于僅僅使用攝像設備對樓宇中的人員或物品進行跟蹤監(jiān)控。于是基于無線的定位技術(shù)在悄然間興起。這種技術(shù)不但可以進行目標跟蹤,實施監(jiān)視目標的行動路線,還可以預測目標的前進軌跡,這些都是傳統(tǒng)的攝像監(jiān)控系統(tǒng)不能做到的。這種定位系統(tǒng)從底層硬件到上層軟件涉及到非常多的技術(shù),本文只針對無線定位部分的軟硬件進行重點介紹。
無線跟蹤系統(tǒng)的關(guān)鍵就是如何定位。目前比較成熟的無線定位技術(shù)當屬GPS,然而這種技術(shù)無法在樓宇中使用,因此需要尋找一種新的定位方式來達到我們的目標。這里選擇了基于接收信號強度(RSSI)的帶信標定位技術(shù)。大多數(shù)射頻芯片都可以得到RSSI,但綜合整體性能,我們采用了Chipon推出的一款低功耗2.4 GHz全球免許可費用頻段的射頻芯片CC2500。他體積小,操作簡單,采用3線制SPI。與MCU通信,并能夠在每次接收到信號后自動產(chǎn)生RSSI,方便上層完成定位。
2、 CC2500芯片介紹
2.1 整體性能
他的主要特性有:
(1)體積小,外圍電路簡單。CC22500只有20引腳,4×4 mmQLP封裝。相對于其他射頻芯片的封裝,這種封裝在手工焊接上要容易一些。
(2)靈敏度高,功耗低,速率可調(diào)。CC2500與常用的幾款2.4 GHz射頻芯片的比較如表1所示。表中未注明速率的數(shù)據(jù)是在數(shù)據(jù)傳輸速率250 kb/s下得到的。
(3)CC2500硬件支持包數(shù)據(jù)處理,數(shù)據(jù)接收時,有緩沖,信息同步字自動檢測,地址檢測,信息長度分析和CRC校驗等功能,支持前向糾錯,內(nèi)部集成溫度傳感器。

2.2 WOR功能
為了節(jié)約電能,射頻芯片通常采用休眠模式。芯片在休眠時勢必會丟失信息,CC22500的WOR(Wakeup-on-Radio)功能能很好地避免這點。WOR功能保證芯片在深度睡眠時周期性地蘇醒,探聽周圍是否有信號,這個過程不需要CPU的中斷,如果有數(shù)據(jù)包成功接收,芯片可通過引腳輸出中斷通知MCU讀取。在使用WOR功能時,片上的RC時鐘作為WOR時鐘。溢出的周期時間可由編程確定。
2.3 RSSI和LQI功能
RSSI反映接收信號強度,LQI反映信號的連接質(zhì)量,兩者都可以通過讀取芯片的寄存器得到。LQI雖然能夠判斷連接質(zhì)量,但會因調(diào)制方式的不同而不同。
RSSI是判斷兩個節(jié)點距離的很好的參數(shù)。在從RSSI寄存器中讀到數(shù)值后我們需要進行一系列轉(zhuǎn)化,才能得到接收強度值。首先判斷RSSI寄存器中的值RSSI dec是否大于128,如果成立,則:
![]()
如果小于128,則:
![]()
其中RSSI offset按照數(shù)據(jù)傳輸速率的不同而改變,其取值可參照文獻[1]。
2.4 CCA功能
CCA(Clear Channel Assessment)能夠指示當前信道是否處于空閑狀態(tài)。其作用與CSMA相似。當芯片要轉(zhuǎn)入發(fā)送模式時,會首先檢查信道,只有當信道為空閑時,才進入發(fā)送模式,否則停留在原模式或由編程設定進入其他模式。有3種情況可觸發(fā)CCA功能:
(1)在RSSI低于門限值時;
(2)當接收到一個數(shù)據(jù)包時;
(3)以上兩者都具備。
2.5 發(fā)射功率表
CC2500的功率表是用來在每次發(fā)送時設置發(fā)送功率的,其中最多可以存放8字節(jié)的功率值,默認情況下,每次在發(fā)送時,從最低位功率值開始讀取,每次讀取一個字節(jié)。當讀取到最后一個字節(jié)的時候,自動回到第一個字節(jié)。如果有需要,可編程設置不從第一個字節(jié)開始讀取,以實現(xiàn)發(fā)射功率可調(diào)。
3、 跟蹤算法
3.1 定位算法
所謂的跟蹤軌跡其實就是若干次定位結(jié)果按時間順序的集合。所以如何定位非常重要。目前常用的定位技術(shù)如基于準確測距的定位方法、質(zhì)心算法等在空曠的環(huán)境中能夠比較準確地完成定位,但在建筑物內(nèi)部則相對效果較差。試驗表明基于上述方法進行定位軌跡將是跳躍的,而非連續(xù)的。在建筑物內(nèi)進行定位,有一個好處就是身處其中的待定位目標在活動空間上有一定約束,比如人在走廊中行走時,只能向前或者向后,左右兩邊都是墻壁,無法行走,這樣實際上他的軌跡是遵循一定規(guī)律的。所以可以綜合樓宇內(nèi)部的位置信息進行定位。
考慮以上應用要求和環(huán)境,我們借鑒了文獻[2]中的RADAR系統(tǒng),采用基于RSSI技術(shù)的室內(nèi)定位系統(tǒng),但在測試方法上進行了改進,不利用基站定位,而是采用信標定位。
在系統(tǒng)中存在兩種節(jié)點:一種是位置完全已知的信標節(jié)點;一種是位置待測的目標節(jié)點。經(jīng)測試,我們本次基于CC2500硬件的節(jié)點在樓宇中的極限傳輸距離在60 m左右(PCB板射頻部分走線影響最大傳輸距離),所以為準確起見,使用信標之間的間隔在20 m,在兩個位置中間有墻壁或障礙物時,則一定要放置兩個信標,不遵守上述規(guī)律。當然,信標數(shù)量越多,定位相對就更加準確。目標節(jié)點周期性地發(fā)出信號,信標接收到目標節(jié)點的信號后得到信號強度值RSSI,根據(jù)強度值推算目標節(jié)點的位置,然后把定位信息發(fā)往基站,完成定位工作。
樓宇內(nèi)定位算法通常有基于信號傳輸?shù)慕?jīng)驗模型和基于信號傳播的理論模型兩種。后一種的準確性受建筑物材料的影響較大,最后還要進行大量的試驗修正,所以我們采用信號傳播的經(jīng)驗模型。首先放置好信標。并給定其坐標。設兩個信標之間的距離的一半為D(m),如果兩個信標之間有障礙物,則將信標到障礙物之間的距離定義為D。利用目標節(jié)點在距離D內(nèi)移動,得到各點位置的RSSI,建立各個點上的位置和信號強度關(guān)系的離散數(shù)據(jù)表(x,y,RSSI)。同時要注意保證目標節(jié)點在每一點的時候都會有信標節(jié)點進行定位。可見系統(tǒng)的定位精度:
![]()
其中(x1,y1,RSSI1),(x2,y2,RSSI2)為離散數(shù)據(jù)表中兩個相鄰數(shù)據(jù)。
定位時,信標查表進行定位,當目標節(jié)點信號小于表中最小的門限RSSI時,直接舍棄,會有其他信標對其定位。
3.2 分簇路由算法
信標在得到目標節(jié)點的位置之后,需要將位置信息發(fā)往基站,由基站進入監(jiān)控軟件系統(tǒng)。在樓宇中信標的數(shù)量非常多,如果不選擇一種良好的路由算法,那么很容易造成信息的丟失和誤碼率升高。我們采用分簇路由算法,這種拓撲有利于分布式算法的應用,適合大規(guī)模網(wǎng)絡,簇頭節(jié)點擔負數(shù)據(jù)融合的任務,可使整個網(wǎng)絡的數(shù)據(jù)傳輸量大大減輕,在使用電池供電的場合,其還可以顯著延長整個網(wǎng)絡的生存周期。
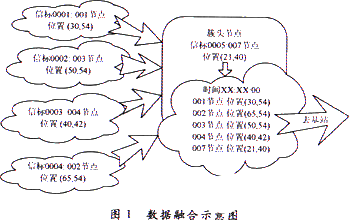
所有信標結(jié)點都固定劃分成若干個簇,每一個簇選擇一個簇頭節(jié)點,在選擇簇頭節(jié)點的時候,要注意選擇處于偏僻位置的信標節(jié)點,這種信標定位的工作相對較少,不容易在定位和傳輸中產(chǎn)生沖突。分簇主要以地理位置為準,每個簇的節(jié)點數(shù)不需要相同,這樣有利于避免數(shù)據(jù)發(fā)往基站時產(chǎn)生沖突。簇頭節(jié)點負責為簇內(nèi)的所有信標節(jié)點分配時槽,每個信標節(jié)點在自己規(guī)定的時間發(fā)送定位信息給簇頭節(jié)點。簇頭節(jié)點接到所有簇內(nèi)節(jié)點的信息后進行綜合,總結(jié)成一幀數(shù)據(jù)發(fā)送給基站。在這幀中,所有信標的定位時間差被忽略,當作是同一個時間的定位信息。
如采用2s定位一次,有一個包含5個節(jié)點的簇,簇頭節(jié)點為每個節(jié)點分配的時槽可以為300 ms。以250 kb/s為傳輸速率的CC2500在這個時槽內(nèi)完全可以完成定位和數(shù)據(jù)傳輸工作。這樣可以留給簇頭節(jié)點約800 ms的時間進行數(shù)據(jù)融合和數(shù)據(jù)傳輸。信標節(jié)點數(shù)據(jù)融合的過程見圖1。
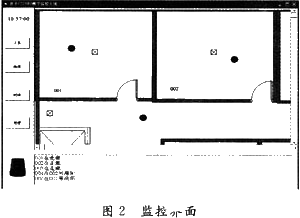
數(shù)據(jù)上傳到基站后,基站通過網(wǎng)口上傳到電腦的監(jiān)控軟件。監(jiān)控軟件采用圖形化方式將節(jié)點的位置示意出來,如圖2所示。
4、 結(jié) 語
試驗表明CC2500在系統(tǒng)中能夠很好地完成定位工作,但這種定位方式比較簡單,不夠精確,其準確程度主要依賴于系統(tǒng)組成之前的RSSI數(shù)據(jù)表準確程度,由于整個測量過程帶有相當大的隨機性和主觀因素,所以通常不能達到理想的程度。如何降低這種主觀因素以及如何減少前期工作量,還需要進一步的探索。
責任編輯:gt
-
射頻芯片組
+關(guān)注
關(guān)注
0文章
2瀏覽量
6238
發(fā)布評論請先 登錄
相關(guān)推薦
CC2500 2.4G射頻收發(fā)芯片
TI無線射頻芯片 CC2500
2.4G無線射頻RFID芯片CC2500資料分享
采用CC2500設計的樓宇定位系統(tǒng)
CC2500模塊移植說明
CC2500 pdf datasheet(2.4GHz 射頻
MSP430和CC2500的USB無線數(shù)據(jù)采集系統(tǒng)
CC2500點對多點無線通信系統(tǒng)設計
基于CC2500的2.4GHz無線收發(fā)系統(tǒng)設計

CC2500和CC1101移植說明






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論